一种多维力传感器的制作方法
本技术涉及传感器,具体为一种多维力传感器。
背景技术:
1、多维力传感器能同时将各个轴上的力和力矩转化为电信号输出,可用于检测不断变化的力与力矩的大小和方向,广泛应用于机器人、自动化设备、传感器等领域中,如自动打磨机器人、远程手术机械手臂等。
2、现有技术中的多维力传感器的种类非常多样,不同的多维力传感器所具有的弹性体的数量和弹性体的具体结构形式各不相同,在传感器承受了过大的载荷后很容易导致弹性体的弹性性能产生不可恢复的改变,造成测量精度下降。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术所存在的上述缺点,本实用新型提供了一种多维力传感器,能够有效地解决现有技术的问题。
3、(二)技术方案
4、为实现以上目的,本实用新型通过以下技术方案予以实现:
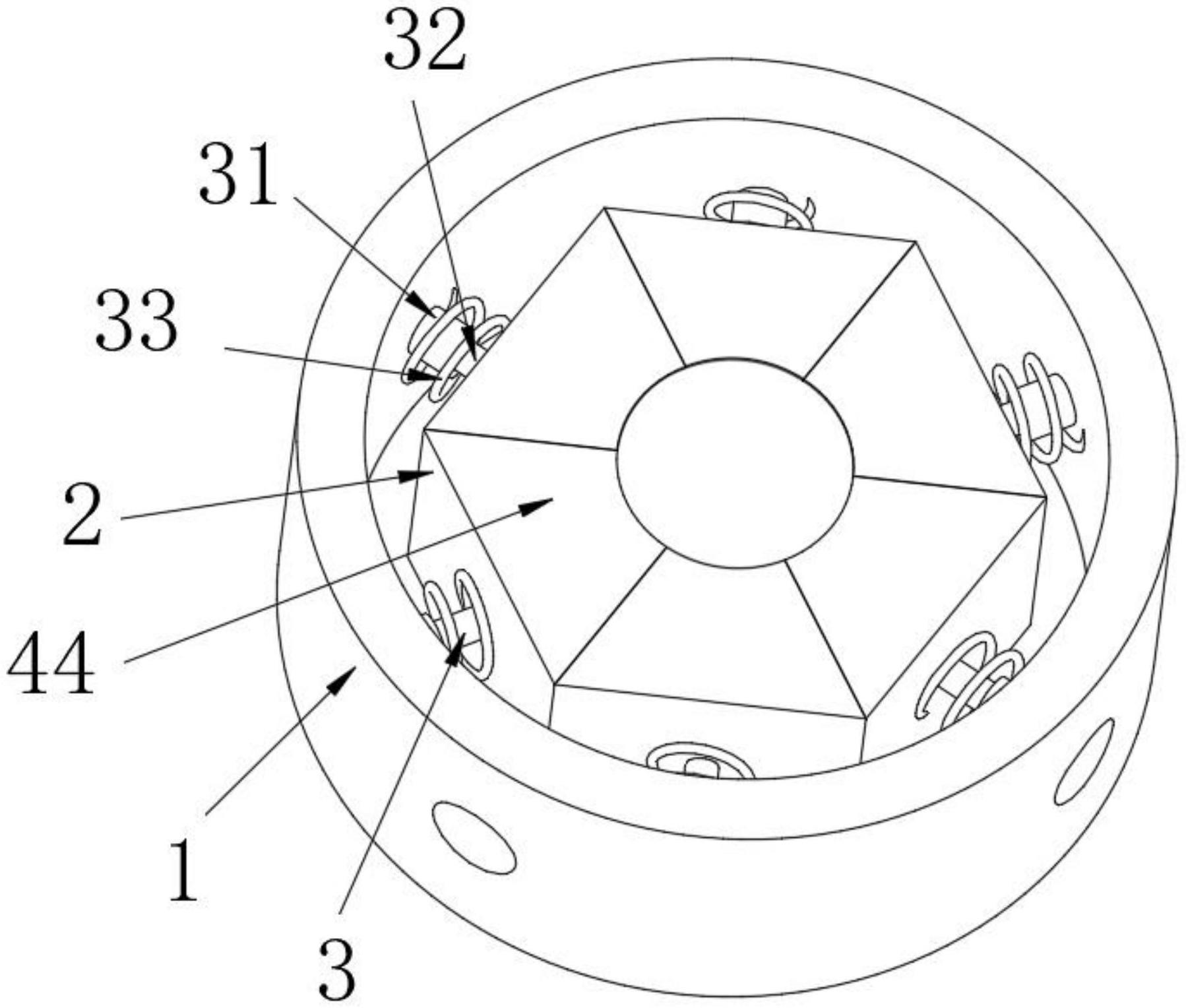
5、本实用新型公开了一种多维力传感器,包括连接架和传感器,所述连接架与传感器之间通过连接机构固定连接,所述连接机构包括弹簧、连接杆和滑动杆,所述传感器的内腔固定安装有拆卸式弹力机构,所述拆卸式弹力机构包括固定板、固定螺栓、弹力金属板和顶板,所述传感器的内壁固定安装有激光测量器。
6、更进一步地,所述连接杆的内表面与滑动杆的外表面滑动连接,所述连接杆和滑动杆的外表面均与弹簧的内表面相套设。
7、更进一步地,所述固定板的右侧与弹力金属板的左侧固定连接,所述弹力金属板的顶部与顶板的底部滑动连接。
8、更进一步地,所述固定板通过固定螺栓与传感器的外表面固定连接,所述顶板的外表面与传感器的内表面滑动连接。
9、(三)有益效果
10、采用本实用新型提供的技术方案,与已知的公有技术相比,具有如下有益效果:
11、1、本实用新型通过增加减少传感器外部作用力影响的设计,通过连接杆与滑动杆的滑动,再通过弹簧的配合,从而达到减少连接架受到外部作用力时,内部传感器受到的影响的效果。
12、2、本实用新型通过增加弹力零件便于更换的设计,通过固定板与固定螺栓和弹力金属板的配合使用,从而达到传感器内部弹性下降的弹性体进行更换,避免弹性下降的弹性体没有无法更换导致测量精度下降的问题。
技术特征:
1.一种多维力传感器,包括连接架(1)和传感器(2),其特征在于:所述连接架(1)与传感器(2)之间通过连接机构(3)固定连接,所述连接机构(3)包括弹簧(31)、连接杆(32)和滑动杆(33),所述传感器(2)的内腔固定安装有拆卸式弹力机构(4),所述拆卸式弹力机构(4)包括固定板(41)、固定螺栓(42)、弹力金属板(43)和顶板(44),所述传感器(2)的内壁固定安装有激光测量器(5)。
2.根据权利要求1所述的一种多维力传感器,其特征在于:所述连接杆(32)的内表面与滑动杆(33)的外表面滑动连接,所述连接杆(32)和滑动杆(33)的外表面均与弹簧(31)的内表面相套设。
3.根据权利要求1所述的一种多维力传感器,其特征在于:所述固定板(41)的右侧与弹力金属板(43)的左侧固定连接,所述弹力金属板(43)的顶部与顶板(44)的底部滑动连接。
4.根据权利要求1所述的一种多维力传感器,其特征在于:所述固定板(41)通过固定螺栓(42)与传感器(2)的外表面固定连接,所述顶板(44)的外表面与传感器(2)的内表面滑动连接。
技术总结
本技术涉及传感器技术领域,且公开了一种多维力传感器,包括连接架和传感器,所述连接架与传感器之间通过连接机构固定连接,所述连接机构包括弹簧、连接杆和滑动杆,所述传感器的内腔固定安装有拆卸式弹力机构,所述拆卸式弹力机构包括固定板、固定螺栓、弹力金属板和顶板,该多维力传感器,通过连接杆与滑动杆的滑动,再通过弹簧的配合,使连接架中间的传感器之间保持较稳定的状态,减少连接架受到外部作用力时,内部传感器受到的影响,通过顶板带动弹力金属板进行移动,再通过激光测量器实时测量弹力金属板的弯曲幅度,来测量出顶板上的重量,通过固定板与固定螺栓和弹力金属板的配合使用,使弹力金属板能随时进行更换。
技术研发人员:张莹莹,李照侠,张丽
受保护的技术使用者:安徽省中邦传感系统工程有限公司
技术研发日:20230508
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!