激光雷达及机器人的制作方法
本申请涉及激光测距,特别是涉及一种激光雷达及机器人。
背景技术:
1、随着科学技术的不断发展,各种类型的智能化机器人越来越多的出现在人们的生活中,以为人们的生活提供便利而提高人们的生活质量。机器人通过内置的激光雷达对周围环境中的障碍物进行探测,并根据所探测的环境情况进行动作响应。
2、目前机器人所采用的激光雷达分为三种:一种为三角雷达,其在进行探测时只能实现2d扫描,且近距离探测覆盖度不足、近距离精度误差大;第二种为tof雷达,其在探测时与三角雷达存在同样的问题;第三种为单颗线激光雷达,其在进行探测时虽然能够实现3d扫描,但其存在较大的锥形探测盲区。
技术实现思路
1、基于此,有必要提供一种无探测死角且探测精度较高的激光雷达,进一步还提供一种具有前述激光雷达的机器人。
2、一种激光雷达,包括:
3、旋转驱动件,具有绕z轴旋转的输出轴;及
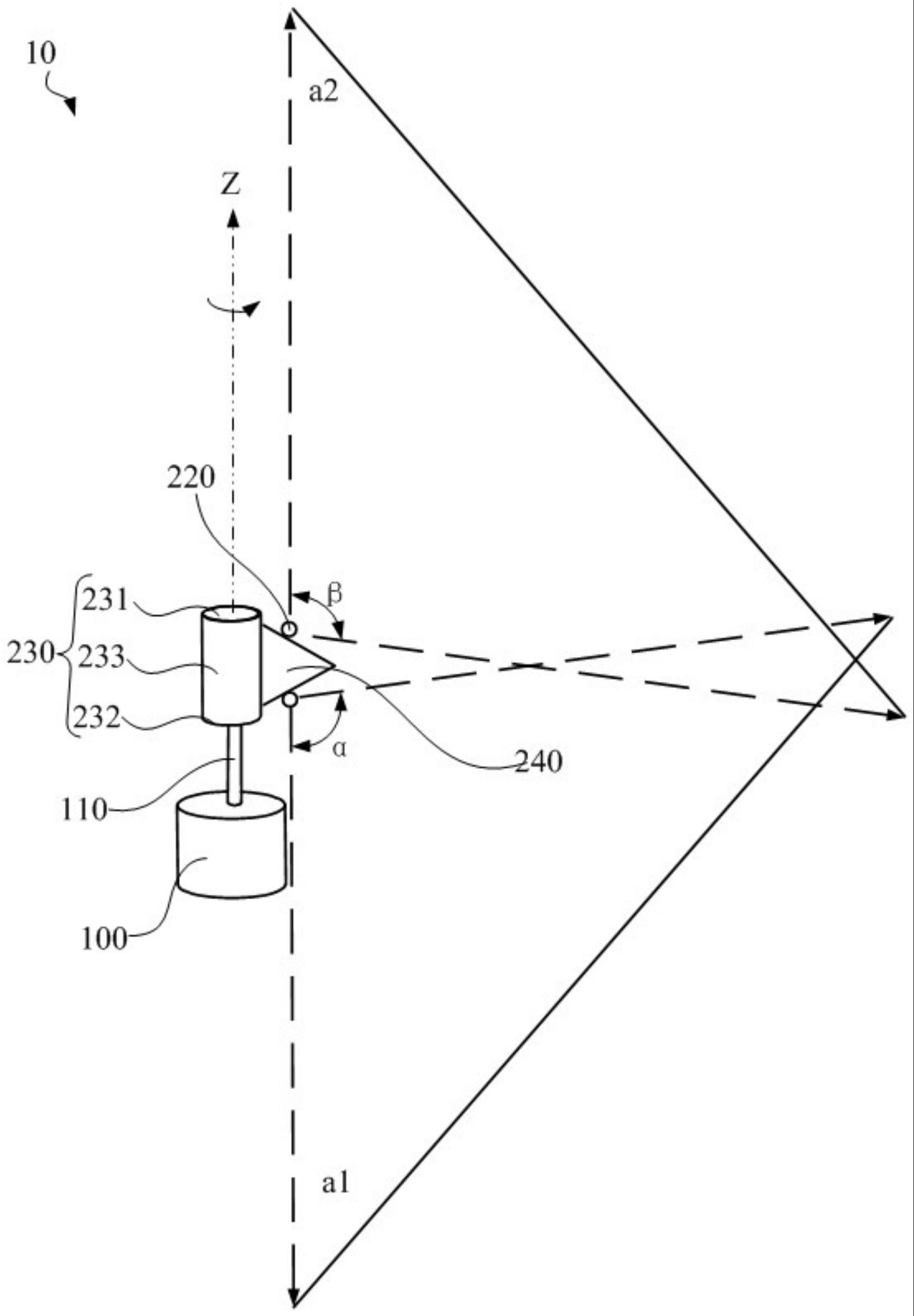
4、激光探测模组,安装于所述输出轴上,并能够随所述输出轴旋转;所述激光探测模组包括激光接收模块及两个线激光发射模块,两个所述线激光发射模块所发射线激光的光平面均与所述z轴相平行且共面设置,并能够共同配合以至少覆盖从所述z轴的负方向到所述z轴的正方向的180°角度范围;两个所述线激光发射模块所发射线激光在反射后能够被所述激光接收模块所接收。
5、上述激光雷达中,两个线激光发射模块所发射线激光恰好能够覆盖从z轴负方向到z轴正方向180°的角度范围,且在两者之间的部分区域存在重叠,从而在激光探测模组绕z轴实现360°旋转的过程中,两个线激光发射模块所发射线激光能够共同配合对周围空间实现全覆盖扫描。进一步地,通过控制输出轴的旋转速度及旋转方向,可以调整激光雷达的探测效率及探测方向。如此,激光雷达可以实现无死角、近距离、高效率、高精度的面阵探测。
6、在其中一个实施例中,两个所述线激光发射模块所发射线激光的扇角均大于90°。
7、在其中一个实施例中,两个所述线激光发射模块所发射线激光的波段分别为808nm、850nm。
8、在其中一个实施例中,所述激光雷达包括衔接件及安装座,所述衔接件包括沿z轴方向相对设置的顶面及底面,还包括连接于所述顶面与所述底面之间的侧面,所述输出轴连接所述底面或所述顶面,所述安装座固定连接于所述侧面;所述激光接收模块及两个所述线激光发射模块均安装于所述安装座。
9、在其中一个实施例中,所述衔接件为联轴器。
10、在其中一个实施例中,所述安装座包括相互连接并均相对所述z轴倾斜的第一安装面及第二安装面,所述第一安装面朝向所述z轴的正方向一侧,所述第二安装面朝向所述z轴的负方向一侧;两个所述线激光发射模块分别安装于所述第一安装面及所述第二安装面。
11、在其中一个实施例中,所述激光接收模块为多个,多个所述激光接收模块分布于所述第一安装面与所述第二安装面。
12、在其中一个实施例中,所述激光接收模块为设置于两个所述线激光发射模块一侧的面阵光感应器。
13、一种机器人,包括:
14、上述的激光雷达;
15、驱动模块,与所述旋转驱动件电连接;及
16、电源,与所述驱动模块电连接。
17、在其中一个实施例中,所述驱动模块与所述激光探测模组无线通信连接。
18、上述机器人中,激光雷达可以实现无死角、近距离、高效率、高精度的面阵探测,从而有助于机器人准确获取障碍物的情况。
技术特征:
1.一种激光雷达,其特征在于,包括:
2.根据权利要求1所述的激光雷达,其特征在于,两个所述线激光发射模块所发射线激光的扇角均大于90°。
3.根据权利要求1所述的激光雷达,其特征在于,两个所述线激光发射模块所发射线激光的波段分别为808nm、850nm。
4.根据权利要求1所述的激光雷达,其特征在于,所述激光雷达包括衔接件及安装座,所述衔接件包括沿z轴方向相对设置的顶面及底面,还包括连接于所述顶面与所述底面之间的侧面,所述输出轴连接所述底面或所述顶面,所述安装座固定连接于所述侧面;所述激光接收模块及两个所述线激光发射模块均安装于所述安装座。
5.根据权利要求4所述的激光雷达,其特征在于,所述衔接件为联轴器。
6.根据权利要求4所述的激光雷达,其特征在于,所述安装座包括相互连接并均相对所述z轴倾斜的第一安装面及第二安装面,所述第一安装面朝向所述z轴的正方向一侧,所述第二安装面朝向所述z轴的负方向一侧;两个所述线激光发射模块分别安装于所述第一安装面及所述第二安装面。
7.根据权利要求6所述的激光雷达,其特征在于,所述激光接收模块为多个,多个所述激光接收模块分布于所述第一安装面与所述第二安装面。
8.根据权利要求6所述的激光雷达,其特征在于,所述激光接收模块为设置于两个所述线激光发射模块一侧的面阵光感应器。
9.一种机器人,其特征在于,包括:
10.根据权利要求9所述的机器人,其特征在于,所述驱动模块与所述激光探测模组无线通信连接。
技术总结
本申请涉及一种激光雷达及机器人。激光雷达包括:旋转驱动件具有绕Z轴旋转的输出轴;激光探测模组安装于输出轴上并能够随输出轴旋转;激光探测模组包括激光接收模块及两个线激光发射模块,两个线激光发射模块所发射线激光的光平面均与Z轴相平行且共面设置,并能够共同配合以至少覆盖从Z轴的负方向到Z轴的正方向的180°角度范围;两个线激光发射模块所发射线激光在反射后能够被激光接收模块所接收。在激光探测模组绕Z轴实现360°旋转时,两个线激光发射模块所发射线激光共同配合对周围空间实现全覆盖扫描,通过控制输出轴的转速及转向以调整激光雷达的探测效率及探测方向,从而激光雷达能够实现无死角、近距离、高效率、高精度的面阵探测。
技术研发人员:王品,王冉,何英,吕星宏
受保护的技术使用者:东莞市沃百泰优电子科技有限公司
技术研发日:20230606
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!