一种用于车载物料的全自动取样系统的制作方法
本技术涉及一种用于车载物料的全自动取样系统,属于自动化取样的。
背景技术:
1、目前国内的各大生产企业对于车载物料取样有两种方式:
2、第一种为人工手动取样,人工取样工作强度大,作业复杂,存在各种人为因素的干扰,很难保证物料取样的有效性、真实性;
3、第二种为自动取样,目前的自动取样技术通常是利用抓斗、螺旋钻、铲子等直接进行取样作业,仅能适应对于散装料的直上直下式自动取样场景。
4、然而,现有技术中,很多场景下需要通过吨袋打包物料,再进行车辆运输。该场景存在制约自动取样的技术难点:吨袋在填装物料后,其上部通常具有空袋,且吨袋在吊装到车辆上后,自身吊带会其上方形成堆叠,从而导致现有的自动取样技术无法实现,严重制约了车辆自动取样的发展。
技术实现思路
1、实用新型目的:针对上述问题,本实用新型的目的是提供一种用于车载物料的全自动取样系统,可适应车载吨袋场景的全自动取样。
2、技术方案:一种用于车载物料的全自动取样系统,包括车库、行车机构、多轴机器人、取样器、视觉定位机构、控制器;所述行车机构包括行车导轨、大车、大车驱动、机器人轨道、机器人驱动,所述行车导轨架设在所述车库上,所述大车架设在所述行车导轨上,且在所述大车驱动的带动下,沿所述行车导轨移动,所述机器人轨道铺设在所述大车底部,所述多轴机器人倒挂固定在所述机器人轨道上,且在所述机器人驱动的带动下,沿所述机器人轨道移动,所述多轴机器人活动端安装所述取样器和视觉定位机构,所述多轴机器人的活动范围覆盖所述车库;所述多轴机器人、取样器、视觉定位机构、大车驱动、机器人驱动分别与所述控制器信号关联。
3、本实用新型的原理是:使用时,车辆驶入车库内指定位置,控制器通过多轴机器人驱动视觉定位机构朝向车辆上装载的吨袋,信号控制视觉定位机构进行吨袋图像采集,采用现有的图像处理算法进行采样点的定位,优选避开吨袋的上方位置,选择合适的吨袋侧部采样点。之后,控制器信号控制多轴机器人到达取样位置,进行姿态调整,并信号驱动取样器插入吨袋采样点进行取样,从而完成整个全自动的取样作业。
4、进一步,还包括识别一体机、门禁装置,所述识别一体机安装于所述门禁装置的入口处,用于识别车牌号,所述门禁装置设置于所述车库的入口处,所述识别一体机、门禁装置分别与所述控制器信号关联;所述控制器获取采样信息后,与识别一体机获取的车牌信息进行对照,从而控制门禁装置的开合。
5、进一步,还包括快换公头、快换母头、取样器存放机构,所述取样器存放机构内摆放多个所述取样器,每个所述取样器上分别固定所述快换母头,所述多轴机器人的活动端固定所述快换公头,所述快换公头与所述快换母头对位匹配,所述多轴机器人的活动范围覆盖所述取样器存放机构;所述快换公头、快换母头分别与所述控制器信号关联。以便于取样器的更换。
6、进一步,所述取样器为螺旋取样器或钎子取样器,以适应不用物料的取样。
7、进一步,还包括l型校准块,所述取样器存放机构包括主体支架及固定在所述主体支架上的多个横向定位传感器、多个纵向定位传感器,所述主体支架上开设有多个v型卡槽,每个所述v型卡槽内分别摆放所述取样器,所述l型校准块固定在所述快换公头上,一侧与多个所述横向定位传感器对位、另一侧与多个所述纵向定位传感器对位;所述横向定位传感器、多个纵向定位传感器分别与所述控制器信号关联。本结构中,由于要进行快换公头与快换母头的自动化定位装配,对于多轴机器人的定位要求极高,因此,设计了横向定位传感器及纵向定位传感器,分别形成快换公头的横向和纵向定位,保证定位精度。
8、进一步,所述取样器存放机构还包括固定在所述主体支架上的至少三个下传感器,所述下传感器与所述l型校准块的底面对位;所述下传感器与所述控制器信号关联。本结构中,在一些会产生地基沉降的场景下,也会需要对快换公头的竖向高度进行精确定位校验,因此,通过该至少三个下传感器,形成三点测面的结构,方便进行高度校验。
9、进一步,还包括相连接的破碎机、缩分机,所述多轴机器人的活动范围覆盖所述破碎机;所述破碎机、缩分机分别与所述控制器信号关联,以便于执行自动化的取样物料的破碎和缩分作业。
10、进一步,还包括样品封装机,所述样品封装机位于所述缩分机下方,且与所述控制器信号关联,以便于执行自动化的样品封装作业。
11、进一步,所述视觉定位机构采用3d工业相机,所述3d工业相机与所述控制器信号关联,可实现图像的自动采集和处理。
12、有益效果:实现了车载吨袋的全自动随机位置取样作业,且不受吨袋上方空袋及吊带堆叠的影响,从吨袋侧面进行取样。同时,可在取样后执行自动化的破碎、缩分、样品封装作业。此外,还可通过多个方向的重复定位进行不同取样器的精确组装,大幅提高系统可靠性。
技术特征:
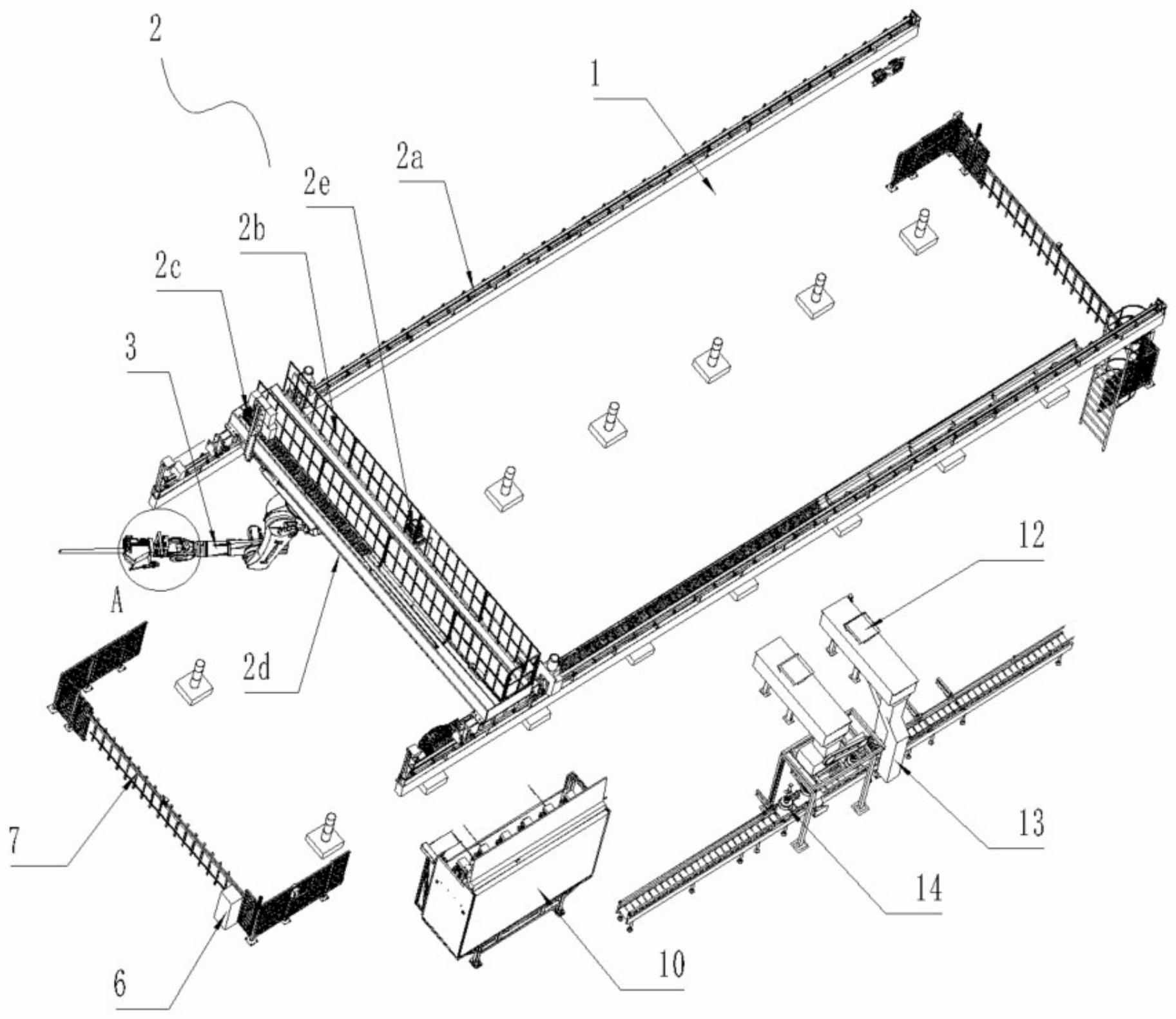
1.一种用于车载物料的全自动取样系统,其特征在于:包括车库(1)、行车机构(2)、多轴机器人(3)、取样器(4)、视觉定位机构(5)、控制器;所述行车机构(2)包括行车导轨(2a)、大车(2b)、大车驱动(2c)、机器人轨道(2d)、机器人驱动(2e),所述行车导轨(2a)架设在所述车库(1)上,所述大车(2b)架设在所述行车导轨(2a)上,且在所述大车驱动(2c)的带动下,沿所述行车导轨(2a)移动,所述机器人轨道(2d)铺设在所述大车(2b)底部,所述多轴机器人(3)倒挂固定在所述机器人轨道(2d)上,且在所述机器人驱动(2e)的带动下,沿所述机器人轨道(2d)移动,所述多轴机器人(3)活动端安装所述取样器(4)和视觉定位机构(5),所述多轴机器人(3)的活动范围覆盖所述车库(1);所述多轴机器人(3)、取样器(4)、视觉定位机构(5)、大车驱动(2c)、机器人驱动(2e)分别与所述控制器信号关联。
2.根据权利要求1所述的一种用于车载物料的全自动取样系统,其特征在于:还包括识别一体机(6)、门禁装置(7),所述识别一体机(6)安装于所述门禁装置(7)的入口处,用于识别车牌号,所述门禁装置(7)设置于所述车库(1)的入口处,所述识别一体机(6)、门禁装置(7)分别与所述控制器信号关联。
3.根据权利要求1所述的一种用于车载物料的全自动取样系统,其特征在于:还包括快换公头(8)、快换母头(9)、取样器存放机构(10),所述取样器存放机构(10)内摆放多个所述取样器(4),每个所述取样器(4)上分别固定所述快换母头(9),所述多轴机器人(3)的活动端固定所述快换公头(8),所述快换公头(8)与所述快换母头(9)对位匹配,所述多轴机器人(3)的活动范围覆盖所述取样器存放机构(10);所述快换公头(8)、快换母头(9)分别与所述控制器信号关联。
4.根据权利要求1所述的一种用于车载物料的全自动取样系统,其特征在于:所述取样器(4)为螺旋取样器或钎子取样器。
5.根据权利要求3所述的一种用于车载物料的全自动取样系统,其特征在于:还包括l型校准块(11),所述取样器存放机构(10)包括主体支架(10a)及固定在所述主体支架(10a)上的多个横向定位传感器(10b)、多个纵向定位传感器(10c),所述主体支架(10a)上开设有多个v型卡槽(10d),每个所述v型卡槽(10d)内分别摆放所述取样器(4),所述l型校准块(11)固定在所述快换公头(8)上,一侧与多个所述横向定位传感器(10b)对位、另一侧与多个所述纵向定位传感器(10c)对位;所述横向定位传感器(10b)、多个纵向定位传感器(10c)分别与所述控制器信号关联。
6.根据权利要求5所述的一种用于车载物料的全自动取样系统,其特征在于:所述取样器存放机构(10)还包括固定在所述主体支架(10a)上的至少三个下传感器(10e),所述下传感器(10e)与所述l型校准块(11)的底面对位;所述下传感器(10e)与所述控制器信号关联。
7.根据权利要求1所述的一种用于车载物料的全自动取样系统,其特征在于:还包括相连接的破碎机(12)、缩分机(13),所述多轴机器人(3)的活动范围覆盖所述破碎机(12);所述破碎机(12)、缩分机(13)分别与所述控制器信号关联。
8.根据权利要求7所述的一种用于车载物料的全自动取样系统,其特征在于:还包括样品封装机(14),所述样品封装机(14)位于所述缩分机(13)下方,且与所述控制器信号关联。
9.根据权利要求1所述的一种用于车载物料的全自动取样系统,其特征在于:所述视觉定位机构(5)采用3d工业相机,所述3d工业相机与所述控制器信号关联。
技术总结
本技术公开了一种用于车载物料的全自动取样系统,包括车库、行车机构、多轴机器人、取样器、视觉定位机构、控制器;行车机构包括行车导轨、大车、大车驱动、机器人轨道、机器人驱动,行车导轨架设在车库上,大车架设在行车导轨上,且在大车驱动的带动下,沿行车导轨移动,机器人轨道铺设在大车底部,多轴机器人倒挂固定在机器人轨道上,且在机器人驱动的带动下,沿机器人轨道移动,多轴机器人活动端安装取样器和视觉定位机构,多轴机器人的活动范围覆盖所述车库。本技术的优点是:实现了车载吨袋的全自动随机位置取样作业,且不受吨袋上方空袋及吊带堆叠的影响,从吨袋侧面进行取样。
技术研发人员:魏云吉,马吴迪,林启林,徐宗立,刘明灯,魏敬忠,张道光
受保护的技术使用者:江苏金恒信息科技股份有限公司
技术研发日:20230613
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!