地震勘探人工震源平衡砸地机的制作方法
本发明涉及地震勘探,特别涉及地震勘探人工震源平衡砸地机。
背景技术:
1、地震是地壳快速释放能量过程中造成的振动,期间会产生地震波的一种自然现象。地球上板块与板块之间相互挤压碰撞,造成板块边沿及板块内部产生错动和破裂,是引起地震的主要原因。在地震学中,震源是地震发生的起始位置,断层开始破裂的地方,震源向上在地球表面上的垂直投影称为震中。震源是地震能量积聚和释放的地方,有一定大小的区域,又称震源区或震源体。地震分为天然地震和人工地震两大类,其中人工地震是由人为活动引起的地震,人为因素引起的地震的震源称人工震源,人工震源通常应用在地震勘探中,即利用人为因素引发的地震去探测地下地质体的特征。
2、地震给人们的生命财产造成了巨大的损失,为了使地震带来的损失减轻到最低限度,提前预知地震的具体数据,多年以来人们总结经验制造了不少勘探装置,但是各种先进的地震观测装置造价高、操作复杂、需要观测者具备一定专业知识。
3、为此,我们提出地震勘探人工震源平衡砸地机。
技术实现思路
1、本发明的目的在于针对现有技术中存在的不足,提供一种造价低廉,操作简单,能够针对野外人工震源进行地震勘探的平衡砸地机,用于解决现有技术中存在的地震观测装置造价高、操作复杂、需要观测者具备一定专业知识的问题。
2、为实现上述目的,本发明采取的技术方案为:
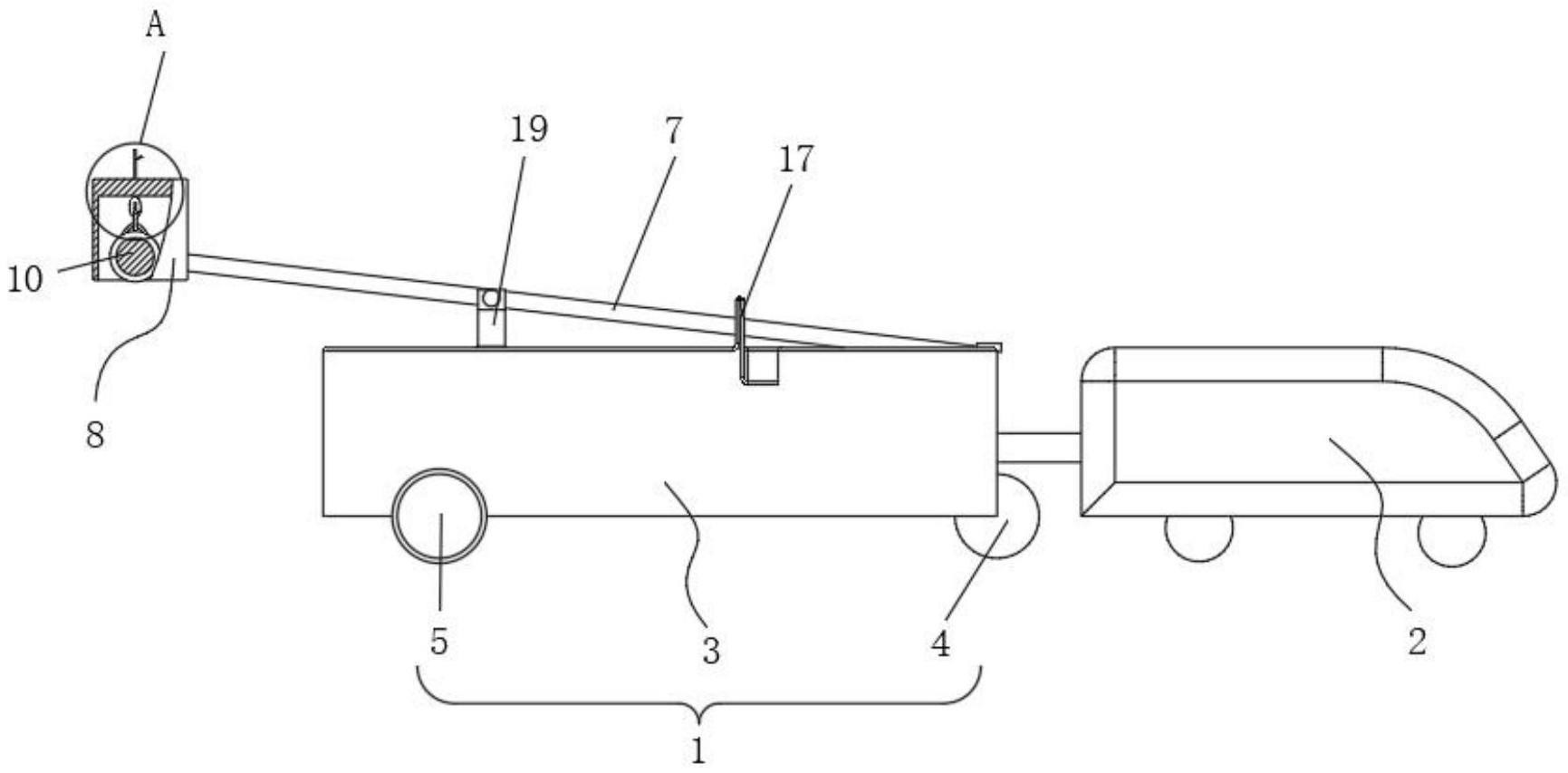
3、地震勘探人工震源平衡砸地机,应用于地震勘探仪器,包括机身主体、动力车和砸地机构;所述动力车与所述机身主体可拆卸连接,并可控制所述机身主体进行移动;所述砸地机构活动安装在所述机身主体上,并可进行砸地工作;其中,所述机身主体包括机身支架、安装在所述机身支架下端的后轮、安装在所述机身支架下端的前轮组件和安装在所述机身支架上端的动力触发装置;所述砸地机构包括活动安装在所述机身主体上的杠杆、与所述杠杆连接的正方体抓钩盒子、设置在所述正方体抓钩盒子内部的伸缩链和固定在所述伸缩链一端的圆球砸地锤,所述伸缩链和所述圆球砸地锤配合使用,能够进行砸地工作。
4、进一步的,所述动力车设置在所述机身主体的后侧,所述砸地机构设置在机身主体的前侧上方,所述机身主体和砸地机构通过所述动力车提供动力。
5、进一步的,所述机身支架设置为长方体结构,且所述机身支架设置为后重前轻,所述后轮永久着地。
6、进一步的,所述前轮组件包括两组所述找平前轮和安装在两组所述找平前轮之间的轮轴,两组所述找平前轮分别设置在所述机身支架下端的两侧,所述轮轴的内侧安装有两组支撑组件和设置在两组所述支撑组件之间的平衡感应尺,所述平衡感应尺可在所述轮轴进行滑动。
7、进一步的,所述支撑组件包括固定在所述轮轴上的感应找平弹腿和设置在所述感应找平弹腿上的伸缩触手,所述支撑组件可用于地势低的位置处。
8、进一步的,移动到地势低的位置时,释放所述感应找平弹腿,使得所述伸缩触手进行移动,所述感应找平弹腿直至探地支撑。
9、进一步的,所述机身主体中后部上方位置设置有放大显示屏幕。
10、进一步的,所述动力触发装置设置在所述机身主体的后部位置,所述动力触发装置设置为为手压板或者动力踏板。
11、进一步的,所述正方体抓钩盒子的上端设置有信号接收触发器,所述信号接收触发器可与地震勘探仪器连接。
12、进一步的,所述机身支架的上端设置有杠杆支撑,所述杠杆活动安装在所述杠杆支撑上,所述杠杆远离所述正方体抓钩盒子的一端和所述动力触发装置连接。
13、进一步的,所述动力车的下端设置有四组移动轮。
14、本发明的工作原理如下:
15、动力车前部与平衡砸地机机身后部固定连接,机身后重前轻,使得机身支架的后轮稳定着地。机身的前端下连接有前轮组件,所述前轮组件包括二个找平前轮和轮轴,两个找平前轮分别在轮轴两侧。所述轮轴内侧上安装感应找平弹腿及伸缩触手,地势低的轮子轴部释放找平弹腿直至探地支撑。
16、前轮每旋转一周,两组找平前轮共同的轮轴上套着的平衡感应尺感应出二个前轮中地势较低的轮子并向地势低的轮子方向滑动,引起贴合吸附在轮轴上的两组感应找平弹腿之一释放下垂,伸缩触手稳定支撑到地面,直至两组找平前轮共同的轮轴上套着的平衡感应尺不再移动后,平衡砸地机处于稳定不会翻车状态。
17、同时,平衡状态显示在安装于后轮附近的放大显示屏幕上,操作人员可以清晰看到平衡状态。
18、杠杆尾端的操作工看到显示屏幕显示平衡砸地机平衡时,释放动力触发机构。
19、圆球砸地锤随着平衡砸地机的杠杆失衡震动而下落,带着伸缩链向下冲出正方体抓钩盒子,对地面产生足够大的砸地重力,此时信号接收触发器产生信号传输给地震仪器,命令信号接收仪器开始接收由此产生的地震波。
20、砸地之后圆球砸地锤跟随伸缩链回弹收回正方体抓钩盒子中,前轮的支撑杆也收起至0度水平贴合吸附在两组找平前轮共同的轮轴上。
21、随着平衡砸地机继续前行,两组找平前轮旋转一圈,平衡砸地机再次找到平衡后,杠杆尾端操作工再次释放较小的人工压力,利用杠杆原理,将最前方的杠杆另一端连接的正方体抓钩盒子升至合适高度,圆球砸地锤再次下落,圆球砸地锤再次跟随伸缩链弹出正方体抓钩盒子,砸向地面,如此循环往复。
22、每当两组找平前轮旋转一周,实现一次平衡,操作工释放人工压力,仪器接收一次圆球砸地锤砸地的地震波。
23、相邻二次砸地间隔距离的长短,由二个等周长的前轮决定。如需更改砸地间距米数,只需同时更换二个更大或更小周长的前轮。
24、如此循环往复,实现人工震源地震勘探。
25、综上所述,本发明包括以下至少一种有益技术效果:
26、本发明中,通过设置的机身主体、动力车和砸地机构,两组找平前轮、平衡感应尺和后轮配合使用,避免了机身主体出现翻车状态,圆球砸地锤通过杠杆原理产生地震波,信号接收触发器产生信号传输给地震勘探仪器,命令信号接收仪器开始接收由此产生的地震波,工作流程简单,操作方便,易于上手,极大降低了员工操作冗杂导致失误的可能性,每当两组找平前轮旋转一周,实现一次平衡,操作工释放人工压力,仪器接收一次圆球砸地锤砸地的地震波,只需同时更换两组更大或更小周长的找平前轮,方便工作人员根据具体的工作状况更改人工震源的间距,动力车带动平衡砸地机前行工作,方便转移,降低工作人员的劳动强度。
技术特征:
1.地震勘探人工震源平衡砸地机,其特征在于,应用于地震勘探仪器,包括:
2.根据权利要求1所述的地震勘探人工震源平衡砸地机,其特征在于:所述动力车(2)设置在机身主体(1)的后侧,所述砸地机构设置在机身主体(1)的前侧上方,所述机身主体(1)和砸地机构通过动力车(2)提供动力。
3.根据权利要求2所述的地震勘探人工震源平衡砸地机,其特征在于:所述机身支架(3)设置为长方体结构,且所述机身支架(3)设置为后重前轻,所述后轮(4)永久着地。
4.根据权利要求3所述的地震勘探人工震源平衡砸地机,其特征在于:所述前轮组件(5)包括两组找平前轮(11)和安装在两组找平前轮(11)之间的轮轴(12),两组所述找平前轮(11)分别设置在机身支架(3)下端的两侧,所述轮轴(12)的内侧安装有两组支撑组件(13)和设置在两组支撑组件(13)之间的平衡感应尺(14),所述平衡感应尺(14)可在轮轴(12)进行滑动。
5.根据权利要求4所述的地震勘探人工震源平衡砸地机,其特征在于:所述支撑组件(13)包括固定在轮轴(12)上的感应找平弹腿(15)和设置在感应找平弹腿(15)上的伸缩触手(16),所述支撑组件(13)可用于地势低的位置处。
6.根据权利要求4所述的地震勘探人工震源平衡砸地机,其特征在于:所述机身主体(1)中后部上方位置设置有放大显示屏幕(17)。
7.根据权利要求1所述的地震勘探人工震源平衡砸地机,其特征在于:所述动力触发装置(6)设置在机身主体(1)的后部位置,所述动力触发装置(6)设置为为手压板或者动力踏板。
8.根据权利要求1所述的地震勘探人工震源平衡砸地机,其特征在于:所述正方体抓钩盒子(8)的上端设置有信号接收触发器(18),所述信号接收触发器(18)可与地震勘探仪器连接。
9.根据权利要求1所述的地震勘探人工震源平衡砸地机,其特征在于:所述机身支架(3)的上端设置有杠杆支撑(19),所述杠杆(7)活动安装在杠杆支撑(19)上,所述杠杆(7)远离正方体抓钩盒子(8)的一端和动力触发装置(6)连接。
10.根据权利要求1所述的地震勘探人工震源平衡砸地机,其特征在于:所述动力车(2)的下端设置有四组移动轮。
技术总结
本申请提供了地震勘探人工震源平衡砸地机,包括机身主体、动力车和砸地机构;动力车与机身主体可拆卸连接;砸地机构活动安装在机身主体上;机身主体包括机身支架、安装在机身支架下端的后轮、安装在机身支架下端的前轮组件和安装在机身支架上端的动力触发装置。本发明的地震勘探人工震源平衡砸地机,找平前轮、平衡感应尺和后轮配合使用,避免了机身主体出现翻车状态,圆球砸地锤通过杠杆原理产生地震波,信号接收触发器产生信号传输给地震勘探仪器,工作流程简单,极大降低了员工操作冗杂导致失误的可能性,只需同时更换两组更大或更小周长的找平前轮,方便工作人员根据具体的工作状况更改人工震源的间距。
技术研发人员:王林燕,王磊,赵传伟
受保护的技术使用者:中国煤炭地质总局物测队
技术研发日:20230628
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!