无人机的导航系统和无人机的制作方法
本申请涉及无人机设备,特别是涉及一种无人机的导航系统和无人机。
背景技术:
1、无人机系统复杂,按功能可以分为飞控系统、导航系统、动力系统、图传系统、避障系统、影像系统等。其中,飞控和导航是无人机安全飞行、有效完成任务的重要保证。导航系统向无人机提供参考坐标系的位置、速度、飞行姿态,引导无人机按照指定航线飞行。故而,如何提高导航系统的抗干扰能力尤为重要。
2、传统的导航系统抗干扰方法,采用洋白铜屏蔽罩覆盖定位模块,以降低无人机中其他模块对定位模块的干扰。
3、然而,上述导航系统抗干扰方法仅从定位模块本身的屏蔽结构出发,抗干扰能力差。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高导航系统抗干扰能力的无人机的导航系统和无人机。
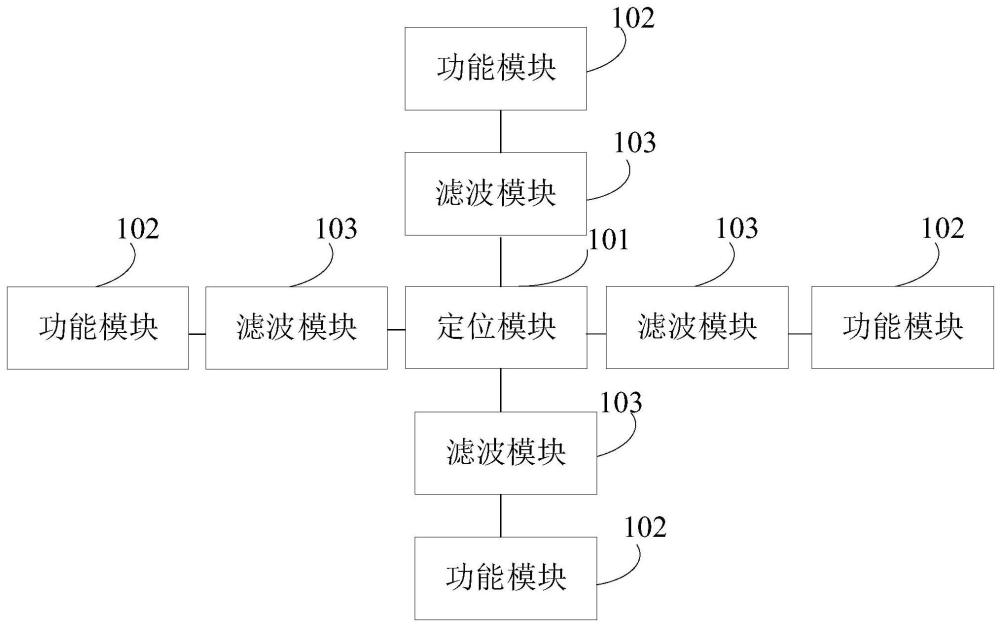
2、第一方面,本申请提供了一种无人机的导航系统。该导航系统包括:
3、定位模块;
4、功能模块,与该定位模块连接,用于向该定位模块发送功能信号;
5、滤波模块,该滤波模块一端连接该定位模块,该滤波模块的另一端连接该功能模块,用于滤除该功能信号中的干扰信号。
6、在其中一个实施例中,各该功能模块一一对应的滤波模块包括低通滤波器或带通滤波器。
7、在其中一个实施例中,该功能模块包括磁力计,该磁力计对应的滤波模块包括第一滤波器,该第一滤波器包括第一电容和第一电感;
8、该第一电容的第一端与模拟地连接,该第一电容的第二端与该第一电感的第一端和该定位模块连接,该第一电感的第二端与该磁力计连接。
9、在其中一个实施例中,该功能模块还包括气压计,该气压计对应的滤波模块包括第二滤波器,该第二滤波器包括第二电容、第三电容和第二电感;
10、该第二电容的第一端与数字地连接,该第二电容的第二端与该气压计和该第二电感的第一端连接,该第二电感的第二端与该第三电容的第一端和该定位模块连接,该第三电容的第二端与模拟地连接。
11、在其中一个实施例中,该功能模块还包括惯性传感器,该惯性传感器对应的滤波模块包括第三滤波器,该第三滤波器包括第四电容、第五电容和第三电感;
12、该第四电容的第一端与数字地连接,该第四电容的第二端与该惯性传感器和该第三电感的第一端连接,该第三电感的第二端与第五电容的第一端和定位模块连接,该第五电容的第二端与模拟地连接。
13、在其中一个实施例中,该功能模块还包括串口模块,该串口模块对应的滤波模块包括第四滤波器,该第四滤波器包括第六电容和第四电感;
14、该第六电容的第一端与模拟地连接,该第六电容的第二端与该第四电感的第一端和该定位模块连接,该第四电感的第二端与该串口模块连接。
15、在其中一个实施例中,该导航系统还包括隔离模块、该隔离模块对应的第七电容和供电模块;
16、该隔离模块的第一端与供电模块连接,该隔离模块的第二端与该第七电容的第一端和该定位模块连接,该第七电容的第二端与模拟地连接。
17、在其中一个实施例中,该定位模块设置于该无人机上远离该无人机的射频模块的位置。
18、在其中一个实施例中,该导航系统设置在主板上,该主板通过同轴线与该无人机的飞控主板连接,该主板和该同轴线的屏蔽层包括吸波膜。
19、第二方面,本申请还提供了一种无人机,包括上述导航系统。
20、上述无人机的导航系统和无人机,无人机的导航系统包括定位模块、功能模块以及滤波模块,功能模块与定位模块连接,用于向定位模块发送功能信号;滤波模块一端连接定位模块,滤波模块的另一端连接功能模块,用于滤除功能信号中的干扰信号。现有技术中,采用洋白铜屏蔽罩覆盖定位模块,以降低无人机中其他模块对定位模块的干扰。然而,无人机的导航系统中的功能模块向定位导航模块传输信号时,信号的时钟高次谐波会进入导航系统的射频通带内,影响定位模块接收信号的灵敏度。现有技术仅从定位模块本身的屏蔽结构出发,抗干扰能力差。而本申请实施例中,无人机的导航系统中的在功能模块与定位模块之间设置滤波模块,滤波模块将功能模块发送给定位模块的功能信号中的干扰信号滤除,即,利用滤波模块抑制信号的时钟高次谐波进入无人机导航系统的射频通带内,提高了导航系统的抗干扰能力。
技术特征:
1.一种无人机的导航系统,其特征在于,所述导航系统包括:
2.根据权利要求1所述的导航系统,其特征在于,各所述滤波模块包括低通滤波器或带通滤波器。
3.根据权利要求2所述的导航系统,其特征在于,所述功能模块包括磁力计,所述磁力计对应的滤波模块包括第一滤波器,所述第一滤波器包括第一电容和第一电感;
4.根据权利要求2所述的导航系统,其特征在于,所述功能模块还包括气压计,所述气压计对应的滤波模块包括第二滤波器,所述第二滤波器包括第二电容、第三电容和第二电感;
5.根据权利要求2所述的导航系统,其特征在于,所述功能模块还包括惯性传感器,所述惯性传感器对应的滤波模块包括第三滤波器,所述第三滤波器包括第四电容、第五电容和第三电感;
6.根据权利要求2所述的导航系统,其特征在于,所述功能模块还包括串口模块,所述串口模块对应的滤波模块包括第四滤波器,所述第四滤波器包括第六电容和第四电感;
7.根据权利要求1所述的导航系统,其特征在于,所述导航系统还包括隔离模块、所述隔离模块对应的第七电容和供电模块;
8.根据权利要求1所述的导航系统,其特征在于,所述定位模块设置于所述无人机上远离所述无人机的射频模块的位置。
9.根据权利要求1-8任一项所述的导航系统,其特征在于,所述导航系统设置在主板上,所述主板通过同轴线与所述无人机的飞控主板连接,所述主板和所述同轴线的屏蔽层包括吸波膜。
10.一种无人机,其特征在于,包括上述权利要求1至9中任一项所述的导航系统。
技术总结
本申请涉及一种无人机的导航系统和无人机。无人机的导航系统包括定位模块、功能模块以及滤波模块,功能模块与定位模块连接,用于向定位模块发送功能信号;滤波模块一端连接定位模块,滤波模块的另一端连接功能模块,用于滤除功能信号中的干扰信号,能够提高导航系统的抗干扰能力。
技术研发人员:请求不公布姓名
受保护的技术使用者:刘俊
技术研发日:20230804
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!