一种轮式移动式机器人电磁兼容测试工装平台的制作方法
本技术涉及机器人电磁兼容测试设备,具体涉及一种轮式移动式机器人电磁兼容测试工装平台。
背景技术:
1、电磁兼容测试emc(electro magnetic compatibility),是指设备或系统在其中电磁环境中符合要求运行并不对其环境中的任何设备产生无法忍受的电磁干扰能力。
2、emc测试包括测试方法、测量仪器和试验场所,测试方法以各类标准为依据,测试仪器以频域为基础,试验场地是进行emc测试的先决条件,也是衡量emc工作水平的重要因素。emc检测受场地的影响很大,尤其以电磁辐射发射、辐射接收与辐射敏感度的测试场地的要求最为严格。目前,国内外常用的试验场地有:开阔场、半电波暗室、屏蔽室、混响室等。
3、随着科技的发展,轮式移动机器人越来越普遍,设计的功能越来越多,结构也越来越复杂。轮式移动机器人其在设计研制的过程中,需要对其进行emc的相容性预测和评估,才能及早发现可能存在的电磁干扰,并采取必要的抑制和防护措施,从而确保产品内系统的电磁兼容性。
4、轮式移动机器人在进行emc电磁兼容性测试时,需要在测试场地对其进行固定,使其保持静止状态,防止其在测试过程中因位置的移动而带来的测试结果精准度受到影响的问题。现有的固定方式为:通常在固定平台上设置有支撑滚轮,轮式移动机器人底部的车轮则通过放置在支撑滚轮之间进行卡紧定位。然而由于现有的平台固定结构其一般固定位置为不可调的,对于不同尺寸的轮式机器人,现有的做法存在两种方式:1、一种是通过采用对应规格尺寸的固定平台结构;2、另一种则通过在轮式移动机器人的底部临时加转测试滚轮,通过对加转测试滚轮的固定来与下方的固定平台进行配合;现有的上述方式其都存在测评平台灵活性较差,测试过程较为繁琐的缺陷。
技术实现思路
1、针对现有技术中存在的缺陷,本实用新型的目的在于提供一种轮式移动式机器人电磁兼容测试工装平台,旨在解决现有的用于轮式移动机器人在电磁兼容测试平台存在灵活性较差,测试过程较为繁琐的问题。
2、为实现上述目的,本实用新型采用的技术方案如下:
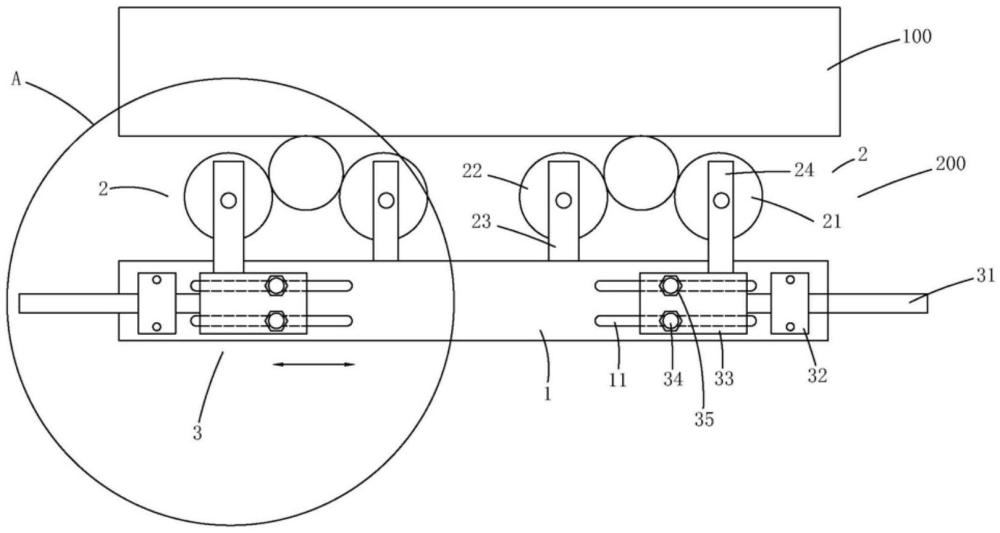
3、本申请提供了一种轮式移动式机器人电磁兼容测试工装平台,所述电磁兼容测试工装平台包括绝缘支撑台架,所述电磁兼容测试工装还包括四组绝缘支撑滚轮组以及分别用于调节四组所述绝缘支撑滚轮组的四组调节组件,四组所述绝缘支撑滚轮组件对应布置在所述绝缘支撑台架的顶端面四周,每组所述绝缘支撑滚轮组件包括相对设置的一固定绝缘支撑滚轮和一可调绝缘支撑滚轮,所述固定绝缘支撑滚轮竖直固定安装在所述绝缘支撑台架的顶端面,所述可调绝缘支撑滚轮滑动安装在所述绝缘支撑台架的顶端面,所述可调绝缘支撑滚轮设置在所述绝缘支撑台架外侧,所述可调绝缘支撑滚轮与所述绝缘支撑台架的长度方向构成滑动连接,所述调节组件与所述可调绝缘支撑滚轮固定相连,用于调节所述可调绝缘支撑滚轮沿着所述绝缘支撑台架外侧边缘往复移动。
4、进一步的,所述调节组件包括调节螺杆、固定座以及滑板,所述固定座固定安装在所述绝缘支撑台架外侧边缘处,所述固定座设置有与所述调节螺杆相配合的螺纹孔,所述调节螺杆的一端穿过所述螺纹孔与所述滑板一侧固定相连,所述可调绝缘支撑滚轮转动安装在所述滑板顶端,所述滑板与所述绝缘支撑台架外侧边缘形成平行于所述绝缘支撑台架长度方向的滑动连接。
5、进一步的,所述调节组件还包括支撑架,所述支撑架竖直安装在所述滑板顶端面上,所述可调绝缘支撑滚轮转动安装在所述支撑架的顶端。
6、进一步的,所述固定绝缘支撑滚轮通过设置有的安装架固定安装在所述绝缘支撑台架顶端面,所述安装架竖直固定安装在所述绝缘支撑台架顶端面上,所述安装架与所述支撑架相对设置,所述固定绝缘支撑滚轮转动安装在所述安装架的顶端。
7、进一步的,所述绝缘支撑台架沿其长度方向的外侧边上设置有水平布置的长条形滑槽,所述滑板通过设置有的螺栓和螺母滑动安装在所述滑槽内,其中所述螺栓的一端安装在所述滑槽内,所述螺栓的另一端穿过所述滑板并通过所述螺母固定安装在所述滑板上。
8、本实用新型的有益效果为:通过在绝缘支撑台架上配备有调节组件,利用调节组件对可调绝缘支撑滚轮在绝缘支撑台架上的位置进行灵活调整,只需要调整可调绝缘支撑滚轮与固定绝缘支撑滚轮之间的距离,便可以实现不同间距大小的轮式移动机器人的固定安装,方便快捷。
技术特征:
1.一种轮式移动式机器人电磁兼容测试工装平台,所述电磁兼容测试工装平台包括绝缘支撑台架,其特征在于,所述电磁兼容测试工装还包括四组绝缘支撑滚轮组以及分别用于调节四组所述绝缘支撑滚轮组的四组调节组件,四组所述绝缘支撑滚轮组件对应布置在所述绝缘支撑台架的顶端面四周,每组所述绝缘支撑滚轮组件包括相对设置的一固定绝缘支撑滚轮和一可调绝缘支撑滚轮,所述固定绝缘支撑滚轮竖直固定安装在所述绝缘支撑台架的顶端面,所述可调绝缘支撑滚轮滑动安装在所述绝缘支撑台架的顶端面,所述可调绝缘支撑滚轮设置在所述绝缘支撑台架外侧,所述可调绝缘支撑滚轮与所述绝缘支撑台架的长度方向构成滑动连接,所述调节组件与所述可调绝缘支撑滚轮固定相连,用于调节所述可调绝缘支撑滚轮沿着所述绝缘支撑台架外侧边缘往复移动。
2.根据权利要求1所述的一种轮式移动式机器人电磁兼容测试工装平台,其特征在于,所述调节组件包括调节螺杆、固定座以及滑板,所述固定座固定安装在所述绝缘支撑台架外侧边缘处,所述固定座设置有与所述调节螺杆相配合的螺纹孔,所述调节螺杆的一端穿过所述螺纹孔与所述滑板一侧固定相连,所述可调绝缘支撑滚轮转动安装在所述滑板顶端,所述滑板与所述绝缘支撑台架外侧边缘形成平行于所述绝缘支撑台架长度方向的滑动连接。
3.根据权利要求2所述的一种轮式移动式机器人电磁兼容测试工装平台,其特征在于,所述调节组件还包括支撑架,所述支撑架竖直安装在所述滑板顶端面上,所述可调绝缘支撑滚轮转动安装在所述支撑架的顶端。
4.根据权利要求3所述的一种轮式移动式机器人电磁兼容测试工装平台,其特征在于,所述固定绝缘支撑滚轮通过设置有的安装架固定安装在所述绝缘支撑台架顶端面,所述安装架竖直固定安装在所述绝缘支撑台架顶端面上,所述安装架与所述支撑架相对设置,所述固定绝缘支撑滚轮转动安装在所述安装架的顶端。
5.根据权利要求2至4任一所述的一种轮式移动式机器人电磁兼容测试工装平台,其特征在于,所述绝缘支撑台架沿其长度方向的外侧边上设置有水平布置的长条形滑槽,所述滑板通过设置有的螺栓和螺母滑动安装在所述滑槽内,其中所述螺栓的一端安装在所述滑槽内,所述螺栓的另一端穿过所述滑板并通过所述螺母固定安装在所述滑板上。
技术总结
本技术提供一种轮式移动式机器人电磁兼容测试工装平台,其包括绝缘支撑台架、四组绝缘支撑滚轮组以及四组调节组件;通过在绝缘支撑台架上配备有调节组件,利用调节组件对可调绝缘支撑滚轮在绝缘支撑台架上的位置进行灵活调整,只需要调整可调绝缘支撑滚轮与固定绝缘支撑滚轮之间的距离,便可以实现不同间距大小的轮式移动机器人的固定安装,方便快捷。
技术研发人员:刘明汉,李倩,李明富,赵海霞,孙诚
受保护的技术使用者:沃德检测(广东)有限公司
技术研发日:20230821
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!