一种工业机器人电磁兼容测试安装平台的制作方法
本技术涉及机器人电磁兼容测试设备,具体涉及一种工业机器人电磁兼容测试安装平台。
背景技术:
1、电磁兼容测试emc(electro magnetic compatibility),是指设备或系统在其中电磁环境中符合要求运行并不对其环境中的任何设备产生无法忍受的电磁干扰能力。
2、随着科技的发展,工业机器人其功能越来越多,设计结构也越来越复杂。由于工业机器人属于电子产品,因此其在设计研制的过程中,需要对其进行emc的相容性预测和评估,才能及早发现可能存在的电磁干扰,并采取必要的抑制和防护措施,从而确保产品内系统的电磁兼容性。
3、测试时,需要将工业机器人固定在测试平台上,机器人机械臂处于额定运行状态,即机械臂需要模拟工作状态时的伸展运转状态,由于测试平台需要考虑工业机器人机械臂的运转加速度,因此需要测试平台具备较好的稳定性,以支撑工业机器人正常运行。
4、现有的测试平台(例如授权公告号为cn210742404u)其一般通过在端面上开设有凹槽,通过将机器人(底部为平面外形设计)底部放置在凹槽内,利用机器人底部外壁与凹槽内壁之间的卡合,来实现机器人的固定。然而,对于不同外形尺寸的工业机器人,由于其底平面外形尺寸的不同,现有的单一测试平台由于其上的凹槽外形尺寸固定不可调,对此,通常的做法是配备几种常用的开槽尺寸的测试平台,有些测试厂家则通过在凹槽内壁与测试工业机器人外壁之间填充一些垫块,来实现对工业机器人的固定。由此可以看出,现有的工业机器人测试平台其灵活性较差,不能同时够兼顾不同外形尺寸的工业机器人的安装测试要求。
技术实现思路
1、针对现有技术中存在的缺陷,本实用新型的目的在于提供一种工业机器人电磁兼容测试安装平台,旨在解决现有的工业机器人测试平台其灵活性较差,不能同时够兼顾不同外形尺寸的工业机器人的安装测试要求的问题。
2、为实现上述目的,本实用新型采用的技术方案如下:
3、本申请提供了一种工业机器人电磁兼容测试安装平台,所述电磁兼容测试安装平台包:
4、测试安装平台本体,所述测试安装平台本体其顶端面设置有矩形凹槽,所述测试安装平台本体相对的两侧分别设置有安装孔,一对所述安装孔与所述矩形凹槽相连通;
5、一对弹性压板,一对所述弹性压板分别安装在开设有所述安装孔的所述矩形凹槽的相对两侧上;
6、一对推送组件,一对所述推送组件分别通过一对所述安装孔与一对所述弹性压板固定相连,用于驱动一对所述弹性压板相互靠拢或远离。
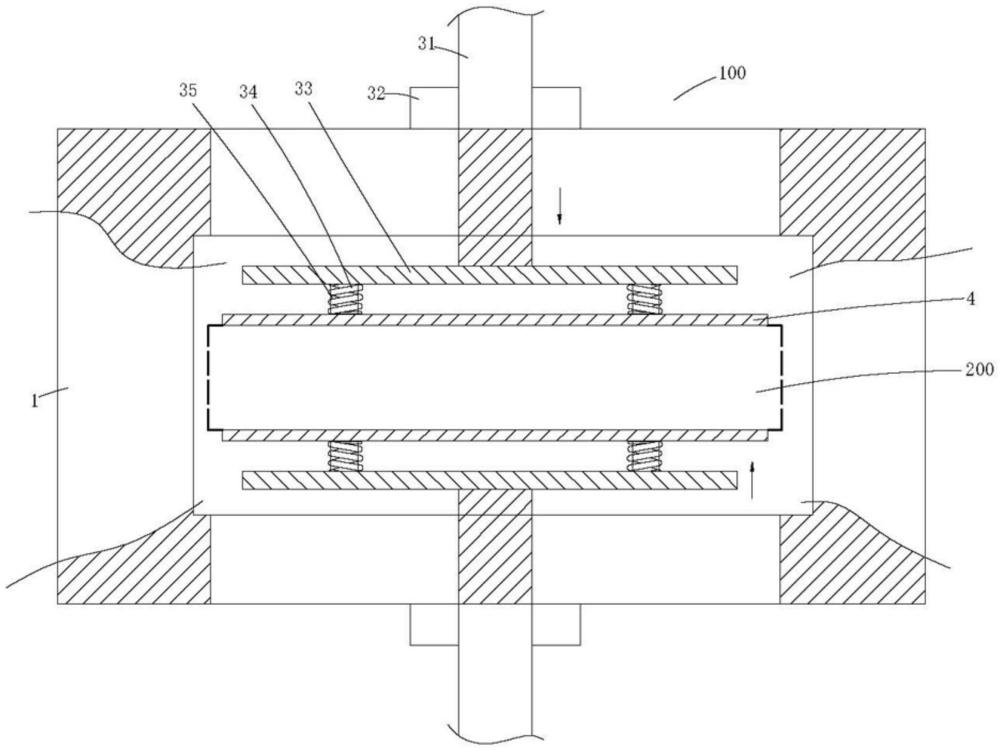
7、进一步的,所述推送组件包括调节螺杆、连接座以及连接板,所述连接座固定安装在所述测试安装平台本体的外侧,所述连接座上设置有与所述调节螺杆相配合的螺纹孔,所述调节螺杆的一端穿过所述螺纹孔与所述连接板固定相连,所述连接板与所述弹性压板固定相连。
8、进一步的,所述推送组件还包括压缩弹簧,所述连接板通过设置有的连接杆与所述弹性压板固定相连,所述压缩弹簧套装在所述连接杆上。
9、进一步的,所述弹性压板的长度为所述测试安装平台本体长度方向的凹槽尺寸的1/2至2/3之间。
10、本实用新型的有益效果为:通过在测试安装平台本体上的凹槽中相对的两侧布置有弹性压板,弹性压板与推送组件相连,利用推送组件带动弹性压板的前后伸缩移动,使得一对弹性压板之间的间距大小发生改变,与放置在凹槽中的工业机器人的相对两侧表面紧密贴合,对其进行夹紧,防止工业机器人在凹槽中产生晃动,同时由于一对弹性压板之间的间距大小可调,可以适应不同外形尺寸大小的工业机器人,通用性强。
技术特征:
1.一种工业机器人电磁兼容测试安装平台,其特征在于,所述电磁兼容测试安装平台包:
2.根据权利要求1所述的一种工业机器人电磁兼容测试安装平台,其特征在于,所述推送组件包括调节螺杆、连接座以及连接板,所述连接座固定安装在所述测试安装平台本体的外侧,所述连接座上设置有与所述调节螺杆相配合的螺纹孔,所述调节螺杆的一端穿过所述螺纹孔与所述连接板固定相连,所述连接板与所述弹性压板固定相连。
3.根据权利要求2所述的一种工业机器人电磁兼容测试安装平台,其特征在于,所述推送组件还包括压缩弹簧,所述连接板通过设置有的连接杆与所述弹性压板固定相连,所述压缩弹簧套装在所述连接杆上。
4.根据权利要求1至3任一所述的一种工业机器人电磁兼容测试安装平台,其特征在于,所述弹性压板的长度为所述测试安装平台本体长度方向的凹槽尺寸的1/2至2/3之间。
技术总结
本技术提供一种工业机器人电磁兼容测试安装平台,其包括测试安装平台本体、一对弹性压板以及一对推送组件;通过在测试安装平台本体上的凹槽中相对的两侧布置有弹性压板,弹性压板与推送组件相连,利用推送组件带动弹性压板的前后伸缩移动,使得一对弹性压板之间的间距大小发生改变,与放置在凹槽中的工业机器人的相对两侧表面紧密贴合,对其进行夹紧,防止工业机器人在凹槽中产生晃动,同时由于一对弹性压板之间的间距大小可调,可以适应不同外形尺寸大小的工业机器人,通用性强。
技术研发人员:刘明汉,李倩,李明富,赵海霞,孙诚
受保护的技术使用者:沃德检测(广东)有限公司
技术研发日:20230821
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!