一种带自锁的瞬时弹性带速碰撞模拟装置
本技术涉及在冲击碰撞模拟装置领域,特别是涉及一种带自锁的瞬时弹性带速碰撞模拟装置。
背景技术:
1、目前大多数冲击试验机,单自由度,不能实现转动冲击试验。在进行冲击试验时,只能将测试样品倾斜一定的角度,用这种冲击试验计算的冲击时间不是瞬时的,具有一定的时间误差;本实用新型提供一种带自锁的瞬时弹性带速碰撞模拟装置采用机械控制方式,实现带自锁的瞬时带速碰撞载荷的获取,模拟了实验室环境下不同高度轮胎实时加速时的真实场景。
技术实现思路
1、本实用新型的目的是提供一种带自锁的瞬时弹性带速碰撞模拟装置,实现带自锁的瞬时带速碰撞载荷的获取,模拟了实验室环境下采用机械控制方式,在不同高度时轮胎实时加速时的真实场景。
2、为实现上述目的,本实用新型采用如下技术方案:
3、本实用新型一种带自锁的瞬时弹性带速碰撞模拟装置,包括:支撑机架、传动系统、碰撞系统、加速系统、测试系统;所述支撑机架固定在地面基础上,采用优质结构钢钢管焊接而成;所述传动系统安装在所述支撑机架的上顶面,所述传动系统的中间支撑所述碰撞系统的摆轴i,所述加速系统给所述碰撞系统的轮胎加速,所述测试系统固定在地面基础上,位于所述支撑机架的正下方,轮胎冲击试样时,所述测试系统采集冲击载荷;所述碰撞系统包括:摆轴i,摆轴ii,轮胎,瞬时控制盘,阻尼器;所述摆轴i与所述摆轴ii铰接,通过所述瞬时控制盘控制角度,所述阻尼器两端固定在所述摆轴i和摆轴ii上;所述瞬时控制盘包括:扇形盘、剪切销,扇形盘的转动中心固定在摆轴ii的上端,剪切销卡在摆轴i的销孔与扇形盘的销孔内,使所述摆轴i和摆轴ii间的角度在举摆和落摆过程中保持不变;所述加速系统包括:万向车体、升降装置、升降平台、驱动电机,滚珠花键轴,花键连接轴,移动装置,滚动拨叉,连接盘,自锁装置,通过万向车体实现所述加速系统的位置及高度调节。
4、进一步的,所述万向车体框架内部安装所述升降装置,所述升降装置的顶端安装所述升降平台,所述驱动电机固定在所述升降平台上,所述升降装置采用四级剪刀叉结构,通错侧向油缸驱动,实现不同高度调节;所述驱动电机的输出轴通过联轴器与所述滚珠花键轴连接,所述滚珠花键轴通过带座轴承支撑,所述花键连接轴与所述滚珠花键轴配合连接,在传递扭矩的同时实现轴向相对滑动,所述移动装置固定在所述升降平台的安装座上通过滚珠丝杠与安装在所述滚动拨叉上的丝母紧固连接,所述滚动拨叉滚轮安装在所述花键连接轴两个定位轴肩内,所述连接盘的一端通过连接法兰与所述花键连接轴连接,所述连接盘的另一端和轮胎连接。
5、进一步的,所述移动装置包括:伺服电机i,弹性联轴器,滚珠丝杆,丝母;所述伺服电机固定在所述升降平台的电机座上,通过弹性联轴器与所述滚珠丝杠连接,所述丝母与所述滚珠丝杠螺旋副配合,所述丝母固定在所述滚动拨叉的丝母安装孔内;所述滚动拨叉包括:u型架、滚轮i、轴承、小圆螺母、滚轮轴、丝母安装孔;所述滚动拨叉为中心对称结构,所述丝母安装孔位于所述u型架的正下方中间位置,所述轴承内圈安装在所述滚轮轴上通过所述小圆螺母和轴肩进行轴向定位,外圈与所述滚轮i热装固定,所述滚轮轴通过轴孔配合对向安装在所述u型架上,通过轴用挡圈进行轴向定位,形成滚动拨叉结构;两个所述滚轮i呈中心对称分布在所述花键连接轴轴线两侧,所述滚轮i与所述花键连接轴的定位轴肩切向接触,两个所述滚轮i与所述花键连接轴为滚动摩擦,实现在所述花键连接轴旋转时对其进行轴向位置调整;所述连接盘包括:主动盘,从动盘;所述主动盘通过连接法兰与所述花键连接轴连接,所述从动盘固定在轮胎的轮毂上;所述主动盘和所述从动盘为q235材质圆盘型类棘轮结构。
6、进一步的,所述自锁装置包括:支撑座,伺服电机,基座,棘轮轴,连杆ii,连杆i,橡胶辊,棘轮,棘爪;所述支撑座由两块长方形钢板焊接而成,通过螺栓固定安装在运输平台的框架底部,所述伺服电机采用卧式电机,通过螺栓安装在所述基座上,所述基座与所述支撑座水平放置的钢板底端通过螺栓相连接,所述伺服电机的输出轴与联轴器通过平键连接将动力传输给所述棘轮;所述棘爪通过所述棘轮轴安装在所述支撑座侧边,所述棘轮的外缘加工一通孔固定连接一销轴,通过销轴与所述连杆i的一端铰接,所述连杆i的另一端外侧固定连接所述橡胶辊,所述橡胶辊的轴线与所述万向轮的轴线平行,所述连杆i的另一端内侧与所述连杆ii一端铰接,所述连杆ii的另一端与所述支撑座铰接;所述支撑座、连杆ii、连杆i与棘轮连接组成曲柄摇杆机构,所述伺服电机驱动所述棘轮转动,当所述棘轮半径与所述连杆i共线时,控制所述伺服电机停机,此时所述橡胶辊与万向车体的的万向轮紧密贴合,实现摩擦制动自锁,此时当所述棘轮半径与所述连杆i共线处于死点位置,系统的传动角为零,所述棘爪防止所述棘轮反转,实现万向车体的制动自锁。
7、本实用新型提供一种带自锁的瞬时弹性带速碰撞模拟装置,解决了冲击实验中冲击时间非瞬时的问题,实现带自锁的瞬时带速碰撞载荷的获取,模拟了实验室环境下采用机械控制方式,在不同高度时轮胎实时加速时的真实场景。
技术特征:
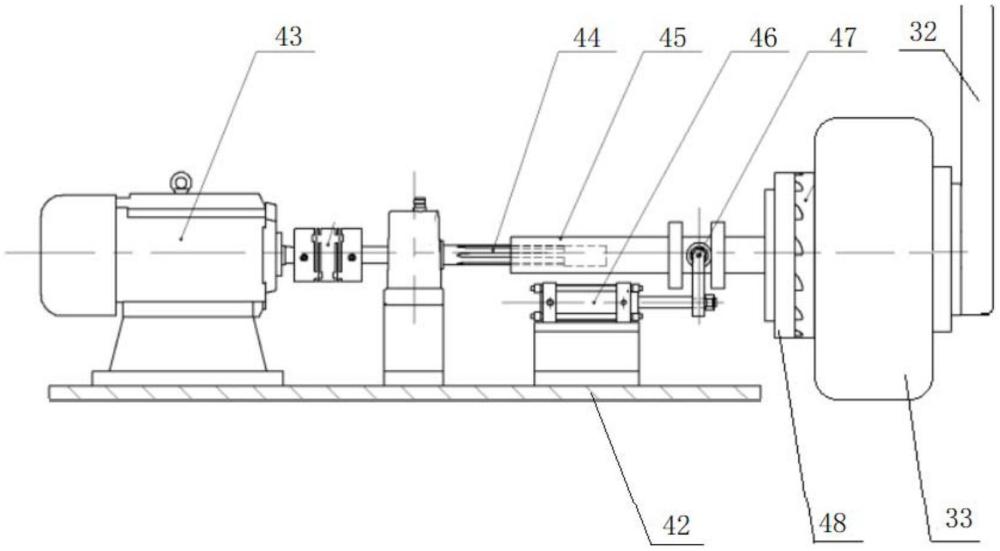
1.一种带自锁的瞬时弹性带速碰撞模拟装置,其特征在于,包括:支撑机架(1)、传动系统(2)、碰撞系统(3)、加速系统(4)、测试系统(5);所述支撑机架(1)固定在地面基础上,采用优质结构钢钢管焊接而成;所述传动系统(2)安装在所述支撑机架(1)的上顶面,所述传动系统(2)的中间支撑所述碰撞系统(3)的摆轴i(31),所述加速系统(4)给所述碰撞系统(3)的轮胎(33)加速,所述测试系统(5)固定在地面基础上,位于所述支撑机架(1)的正下方,轮胎(33)冲击试样时,所述测试系统(5)采集冲击载荷;所述碰撞系统(3)包括:摆轴i(31),摆轴ii(32),轮胎(33),瞬时控制盘(34),阻尼器(35);所述摆轴i(31)与所述摆轴ii(32)铰接,通过所述瞬时控制盘(34)控制角度,所述阻尼器(35)两端固定在所述摆轴i(31)和摆轴ii(32)上;所述瞬时控制盘(34)包括:扇形盘、剪切销,扇形盘的转动中心固定在摆轴ii(32)的上端,剪切销卡在摆轴i(31)的销孔与扇形盘的销孔内,使所述摆轴i(31)和摆轴ii(32)间的角度在举摆和落摆过程中保持不变;所述加速系统(4)包括:万向车体(40)、升降装置(41)、升降平台(42)、驱动电机(43),滚珠花键轴(44),花键连接轴(45),移动装置(46),滚动拨叉(47),连接盘(48),自锁装置(49),通过万向车体(40)实现所述加速系统(4)的位置及高度调节,
2.如权利要求1所述的一种带自锁的瞬时弹性带速碰撞模拟装置,其特征在于,所述万向车体(40)框架内部安装所述升降装置(41),所述升降装置(41)的顶端安装所述升降平台(42),所述驱动电机(43)固定在所述升降平台(42)上,所述升降装置(41)采用四级剪刀叉结构,通错侧向油缸驱动,实现不同高度调节;所述驱动电机(43)的输出轴通过联轴器与所述滚珠花键轴(44)连接,所述滚珠花键轴(44)通过带座轴承支撑,所述花键连接轴(45)与所述滚珠花键轴(44)配合连接,在传递扭矩的同时实现轴向相对滑动,所述移动装置(46)固定在所述升降平台(42)的安装座上通过滚珠丝杠与安装在所述滚动拨叉(47)上的丝母紧固连接,所述滚动拨叉(47)滚轮安装在所述花键连接轴(45)两个定位轴肩内,所述连接盘(48)的一端通过连接法兰与所述花键连接轴(45)连接,所述连接盘(48)的另一端和轮胎连接。
3.如权利要求1所述的一种带自锁的瞬时弹性带速碰撞模拟装置,其特征在于,所述自锁装置(49)包括:支撑座(51),伺服电机(52),基座(53),棘轮轴(54),连杆ii(55),连杆i(56),橡胶辊(57),棘轮(58),棘爪(59);所述支撑座(51)由两块长方形钢板焊接而成,通过螺栓固定安装在运输平台的框架底部,所述伺服电机(52)采用卧式电机,通过螺栓安装在所述基座(53)上,所述基座(53)与所述支撑座(51)水平放置的钢板底端通过螺栓相连接,所述伺服电机(52)的输出轴与联轴器通过平键连接将动力传输给所述棘轮(58);所述棘爪(59)通过所述棘轮轴(54)安装在所述支撑座(51)侧边,所述棘轮(58)的外缘加工一通孔固定连接一销轴,通过销轴与所述连杆i(56)的一端铰接,所述连杆i(56)的另一端外侧固定连接所述橡胶辊(57),所述橡胶辊(57)的轴线与所述万向车体(40)的万向轮的轴线平行,所述连杆i(56)的另一端内侧与所述连杆ii(55)一端铰接,所述连杆ii(55)的另一端与所述支撑座(51)铰接;所述支撑座(51)、连杆ii(55)、连杆i(56)与棘轮(58)连接组成曲柄摇杆机构,所述伺服电机(52)驱动所述棘轮(58)转动,当所述棘轮(58)半径与所述连杆i(56)共线时,控制所述伺服电机停机,此时所述橡胶辊(57)与万向车体(40)的万向轮紧密贴合,实现摩擦制动自锁,此时当所述棘轮(58)半径与所述连杆i(56)共线处于死点位置,系统的传动角为零,所述棘爪(59)防止所述棘轮(58)反转,实现万向车体(40)的制动自锁。
技术总结
本技术涉及一种带自锁的瞬时弹性带速碰撞模拟装置,包括:支撑机架、传动系统、碰撞系统、加速系统、测试系统;所述支撑机架固定在地面基础上,采用优质结构钢钢管焊接而成;所述传动系统安装在所述支撑机架的上顶面,所述传动系统的中间支撑所述碰撞系统的摆轴I,所述加速系统给所述碰撞系统的轮胎加速,所述测试系统固定在地面基础上,位于所述支撑机架的正下方,轮胎冲击试样时,所述测试系统采集冲击载荷;本技术采用机械控制方式,实现瞬时碰撞载荷的获取,加速系统实现不同高度轮胎的实时加速,实现实验室环境下的真实模拟。
技术研发人员:修霞,常德功,郭金升,崔洪伟,孙广康
受保护的技术使用者:青岛恒星科技学院
技术研发日:20230908
技术公布日:2024/12/5
- 还没有人留言评论。精彩留言会获得点赞!