自动化检测仪和生产线的制作方法
本申请涉及自动化生产,尤其涉及一种自动化检测仪和生产线。
背景技术:
1、耐火砖是由耐火黏土或其他耐火原料烧制而成的,可用作建筑窑炉和各种热工设备的高温建筑材料和结构材料。耐火砖在生产过程中,需要对耐火砖三维尺寸数据测量,并对表面缺陷进行检测,其中表面缺陷包括缺边、缺角、凹陷、凸起、裂缝等,以保证耐火砖的质量。
2、现有技术中利用人工进行检测,该过程为:布料机上的夹爪松开耐火砖,耐火砖掉落至夹爪下方的固定座上,操作人员位于固定座处,将固定座上的耐火砖拿起并用量尺进行尺寸测量,并肉眼观测是否缺边、缺角、凹陷、凸起和裂缝,另一操作人员对检测完合格的耐火砖进行码垛。
3、但是,发明人发现现有的人工检测和测量的方式效率低,费时费力。
技术实现思路
1、本申请实施例的目的是提供一种自动化检测仪和生产线,以解决现有的人工检测和测量效率低,费时费力的问题。
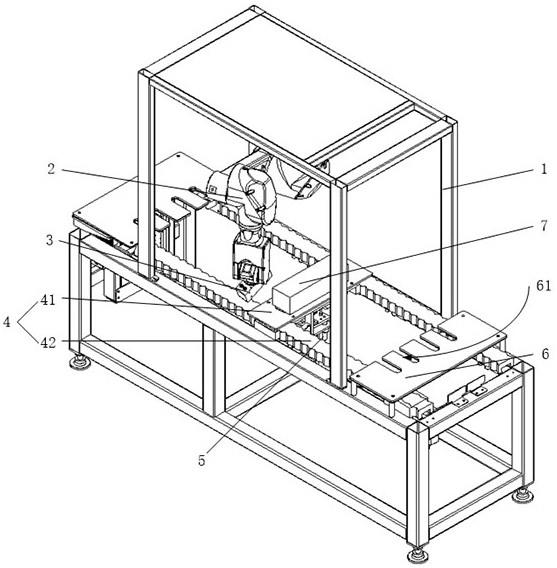
2、为解决上述技术问题,本申请第一方面提供自动化检测仪,包括:
3、框架;
4、六轴工业机器人,所述六轴工业机器人的底座设置在所述框架上,所述六轴工业机器人的末端执行器连接3d相机;
5、移动机构,所述移动机构沿第一水平方向滑动设置在所述框架上;
6、第一升降部,所述第一升降部设置在所述移动机构上,所述第一升降部的升降端具有第一支撑面,所述第一支撑面用于支撑待检测物体,所述移动机构沿所述第一水平方向滑动能够带动所述第一升降部上的所述待检测物体沿所述第一水平方向运动;
7、其中,所述六轴工业机器人用于驱动所述3d相机运动,使所述3d相机能够采集所述待检测物体五个表面的图像和三维点云数据,所述3d相机能够基于采集到的五个所述表面的图像和三维点云数据得到所述待检测物体的三维尺寸数据,基于采集到的五个所述表面的图像和三维点云数据判断所述待检测物体缺陷情况。
8、在一些实施例中,所述移动机构包括支架,所述支架沿所述第一水平方向滑动设置在所述框架上,所述第一升降部设置在所述支架上,所述支架靠近所述六轴工业机器人的一侧具有水平的第二支撑面,所述第二支撑面沿竖直方向设置第一贯穿孔,所述第一升降部升降能够使所述第一支撑面伸出或者缩入所述第一贯穿孔。
9、在一些实施例中,还包括四个升降柱,所述第一升降部的升降端与四个所述升降柱连接,所述第一贯穿孔共有四个,四个所述第一贯穿孔呈矩形排布,所述第一升降部同步驱动四个所述升降柱升降,能够使每个所述升降柱伸出或者缩入一个所述第一贯穿孔,四个所述升降柱的第一端面共同形成所述第一支撑面。
10、在一些实施例中,所述移动机构还包括驱动部,所述驱动部设置在所述框架上,所述驱动部的驱动端与所述支架连接,用于驱动所述支架沿所述第一水平方向运动。
11、在一些实施例中,所述驱动部共有两个,两个所述驱动部沿第二水平方向间隔设置在所述框架上,两个所述驱动部的驱动端与所述支架沿所述第二水平方向的两侧连接,所述第二水平方向垂直于所述第一水平方向。
12、在一些实施例中,所述驱动部包括电机和同步带,所述电机设置在所述框架上,所述电机的输出端与所述同步带传动连接,所述同步带与所述支架连接,所述电机驱动所述同步带转动,带动所述支架沿所述第一水平方向运动。
13、在一些实施例中,所述移动机构还包括导轨,所述导轨沿所述第一水平方向设置在所述框架上,所述支架沿所述第一水平方向滑动设置在所述导轨上。
14、在一些实施例中,所述移动机构还包括沿所述第一水平方向伸缩的风琴罩,所述风琴罩的两端均与所述框架连接,所述风琴罩内设置所述导轨,所述风琴罩沿所述第一水平方向的中部设第二贯穿孔,所述支架通过所述第二贯穿孔与所述导轨沿所述第一水平方向滑动连接。
15、在一些实施例中,还包括第二升降部和两个支撑部,两个所述支撑部分别设置在所述风琴罩的两端,一个所述支撑部设置在所述框架上,所述第二升降部设置在所述框架上,所述第二升降部的升降端与另一个所述支撑部连接;两个所述支撑部靠近彼此的一侧沿所述第一水平方向向内凹陷形成凹槽,所述凹槽从所述支撑部的第一表面延伸至第二表面;
16、两个所述支撑部的第一表面用于支撑所述待检测物体,两个所述支撑部的第二表面与所述第一表面沿竖直方向相对,所述第一升降部升降能够使所述第一支撑面伸出或者缩入所述凹槽。
17、本申请第二方面提供一种生产线,包括:
18、第一方面的自动化检测仪,所述自动化检测仪具有移动机构,所述移动机构能够沿第一水平方向运动;
19、布料机;以及,
20、码垛机器人,所述移动机构、所述布料机和所述码垛机器人沿所述第一水平方向排布,所述移动机构设置在所述布料机和所述码垛机器人之间;
21、其中,所述布料机能够将夹爪上的待检测物体放置在第一升降部的第一支撑面上, 所述移动机构能够将检测完的所述待检测物体沿所述第一水平方向运送至待码垛区域,所述码垛机器人能够对所述待码垛区域内的所述待检测物体进行码垛。
22、相较于现有技术,本申请提供的自动化检测仪,通过在框架上设置六轴工业机器人,并在六轴工业机器人的手部连接3d相机,六轴工业机器人的手部具有六个自由度动作,能够使与其连接的3d相机具有更高的灵活度,进而实现对不同尺寸的待检测物体的五个表面的图像和五个表面的三维点云数据的采集,而3d相机能够基于采集到的五个表面的图像和三维点云数据得到待检测物体的三维尺寸数据,基于采集到的五个所述表面的图像和三维点云数据判断待检测物体缺陷情况,即待检测物体是否缺边、缺角、凹陷、凸起和裂缝,使得检测和测量更加方便、快捷,同时实现了对不同尺寸的待检测物体检测和测量,实用性更强;
23、移动机构可以将上一道工序中的待检测物体运送至3d相机的图像摄取区域,并将检测完成后的待检测物体运送至下一道工序的码垛机器人的工作区域,自动化程度更高,更加省时省力;并且,本申请的移动机构上设第一升降部,通过控制第一升降部的升降高度,使上一道工序中的布料机夹取的待检测物体可以直接放置在第一升降部的第一支撑面上,避免传统的掉落至固定座上而导致待检测物体的损坏,保证了待检测物体的质量。
24、本申请的自动化检测仪,检测和测量更加方便、快捷,检测效率高,且可针对不同尺寸待检测物体检测和测量,实用性强,同时检测和测量过程中保证了待检测物体的质量,可配合布料机和码垛机器人使用形成自动化生产线,自动化程度更高。
技术特征:
1.一种自动化检测仪,其特征在于,包括:
2.根据权利要求1所述的自动化检测仪,其特征在于,
3.根据权利要求2所述的自动化检测仪,其特征在于,
4.根据权利要求2所述的自动化检测仪,其特征在于,
5.根据权利要求4所述的自动化检测仪,其特征在于,
6.根据权利要求4所述的自动化检测仪,其特征在于,
7.根据权利要求2所述的自动化检测仪,其特征在于,
8.根据权利要求7所述的自动化检测仪,其特征在于,
9.根据权利要求8所述的自动化检测仪,其特征在于,
10.一种生产线,其特征在于,包括:
技术总结
本申请提供一种自动化检测仪和生产线,自动化检测仪包括:六轴工业机器人的底座设在框架上,末端执行器连3D相机;移动机构沿第一水平方向滑动设在框架上;第一升降部设在移动机构上,第一升降部的升降端具有第一支撑面,第一支撑面用于支撑待检测物体,移动机构沿第一水平方向滑动能够带动第一升降部上的待检测物体沿第一水平方向运动;六轴工业机器人用于驱动3D相机运动,使3D相机能采集待检测物体五个表面的图像和三维点云数据,3D相机基于采集到的五个表面的图像和三维点云数据得到待检测物体的三维尺寸数据,并判断待检测物体缺陷情况。本申请的自动化检测仪,检测和测量方便、效率高,可对不同尺寸待检测物体检测和测量,自动化程度高。
技术研发人员:邱秉伟,朱葛
受保护的技术使用者:沈阳罗泰智能系统有限公司
技术研发日:20231024
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!