一种安全巡检工业机器人的制作方法
本技术涉及安全巡检,特别涉及一种安全巡检工业机器人。
背景技术:
1、化工车间需要定时进行安全巡检,多通过人员佩戴检测仪器对车间内粉尘浓度、有毒气体含量、温湿度数值等进行检测,并且对机器是否正常运转进行检测,检测效率低下,浪费人力物力,为了提高效率,现采用安全巡检工业机器人进行安全巡检。
2、该安全巡检工业机器人存在以下缺点:1、不使用时,不能将检测装置及监控设备转动到检测板套壳内进行防护,减小对其损坏。为此,我们提出一种安全巡检工业机器人。
技术实现思路
1、本实用新型的主要目的在于提供一种安全巡检工业机器人,可以有效解决背景技术中的问题。
2、为实现上述目的,本实用新型采取的技术方案为:
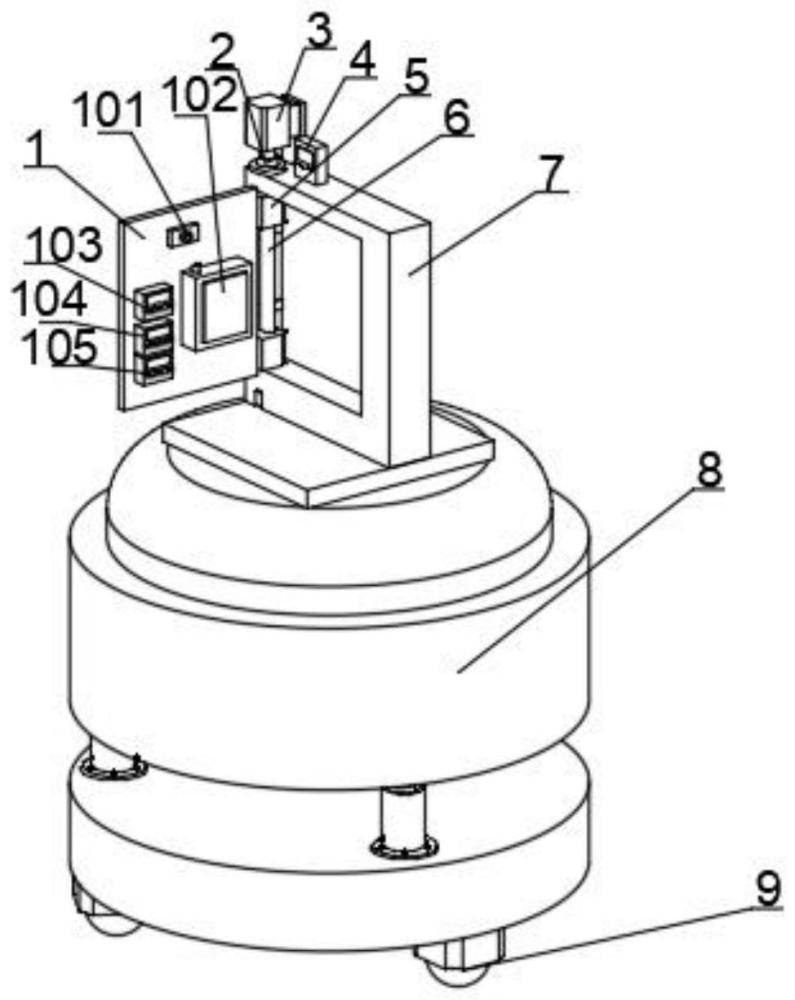
3、一种安全巡检工业机器人,包括工业机器人主体、检测板套壳和检测板;
4、所述工业机器人主体的顶部通过螺钉安装有检测板套壳,所述检测板套壳顶部一端通过安装座安装有伺服电机且伺服电机的输出轴通过联轴器连接转动杆,所述转动杆上通过转动块连接检测板,所述检测板由工业相机、gprs模块、粉尘浓度传感器、温湿度传感器、有毒气体传感器和转动板,所述转动板的内侧通过螺钉安装有工业相机,所述工业相机的下端通过螺钉安装有gprs模块,所述gprs模块的一端通过螺钉安装有粉尘浓度传感器、温湿度传感器和有毒气体传感器。
5、进一步地,所述检测板套壳的顶部且位于伺服电机的一侧通过螺钉安装有伺服电机控制器,所述伺服电机控制器的输出端与伺服电机的输入端通过导线构成电连接。
6、进一步地,所述检测板套壳的顶端一侧套设有定位轴套,所述转动杆的顶端贯穿定位轴套。
7、进一步地,所述工业机器人主体的底部通过螺栓安装有行走轮,利用工业机器人主体便于带动检测板套壳及检测板在车间内按照设定的路线进行行走安全巡检。
8、进一步地,所述粉尘浓度传感器、温湿度传感器和有毒气体传感器的输出端与gprs模块的输入端通过导线构成电连接,检测得到的数据信息通过gprs模块进行远程传输到与之连接的计算机端,实现数据共享,便于监控分析。
9、与现有技术相比,本实用新型具有如下有益效果:
10、1.本实用新型一种安全巡检工业机器人,利用工业机器人主体便于带动检测板套壳及检测板在车间内按照设定的路线进行行走安全巡检,利用工业相机连接外部计算机设备,便于定时拍照并且将照片信息传输到计算机上进行远程监控,利用粉尘浓度传感器便于检测行走路线上气体中粉尘的浓度数值,利用温湿度传感器便于检测行走路线上空气的温湿度值,利用有毒气体传感器便于检测行走路线上空气中有毒气体的含量,检测得到的数据信息通过gprs模块进行远程传输到与之连接的计算机端,实现数据共享,便于监控分析。
11、2.本实用新型一种安全巡检工业机器人,不使用使,利用伺服电机控制器自动控制伺服电机的转动角度,利用伺服电机带动转动杆上的检测板转动,将检测监控设备正好旋转入检测板套壳内,起到防尘、防水的效果,保护效果显著。
技术特征:
1.一种安全巡检工业机器人,包括工业机器人主体(8)、检测板套壳(7)和检测板(1);
2.根据权利要求1所述的一种安全巡检工业机器人,其特征在于:所述检测板套壳(7)的顶部且位于伺服电机(3)的一侧通过螺钉安装有伺服电机控制器(4),所述伺服电机控制器(4)的输出端与伺服电机(3)的输入端通过导线构成电连接。
3.根据权利要求1所述的一种安全巡检工业机器人,其特征在于:所述检测板套壳(7)的顶端一侧套设有定位轴套(2),所述转动杆(6)的顶端贯穿定位轴套(2)。
4.根据权利要求1所述的一种安全巡检工业机器人,其特征在于:所述工业机器人主体(8)的底部通过螺栓安装有行走轮(9)。
5.根据权利要求1所述的一种安全巡检工业机器人,其特征在于:所述粉尘浓度传感器(103)、温湿度传感器(104)和有毒气体传感器(105)的输出端与gprs模块(102)的输入端通过导线构成电连接。
技术总结
本技术公开了一种安全巡检工业机器人,包括工业机器人主体、检测板套壳和检测板,所述工业机器人主体的顶部通过螺钉安装有检测板套壳,所述检测板套壳顶部一端通过安装座安装有伺服电机且伺服电机的输出轴通过联轴器连接转动杆,所述转动杆上通过转动块连接检测板,所述检测板由工业相机、GPRS模块、粉尘浓度传感器、温湿度传感器、有毒气体传感器和转动板,所述转动板的内侧通过螺钉安装有工业相机,所述工业相机的下端通过螺钉安装有GPRS模块。该新型安全巡检工业机器人不使用时,能将检测装置及监控设备转动到检测板套壳内进行防护,减小对其损坏,适合广泛推广使用。
技术研发人员:林姝彤,刘瑞琪,黄建国
受保护的技术使用者:湖南俊拔机器人科技有限公司
技术研发日:20231214
技术公布日:2024/9/26
- 还没有人留言评论。精彩留言会获得点赞!