一种智能驾驶遇障碍物转弯检测装置的制作方法
本技术涉及智能驾驶检测,更具体地说,尤其涉及一种智能驾驶遇障碍物转弯检测装置。
背景技术:
1、智能驾驶是指汽车通过搭载先行的传感器、控制器、执行器、通讯模块等设备实现协助驾驶员对车辆的操控,甚至完全代替驾驶员实现无人驾驶的功能。智能驾驶的网络导航,解决我们在哪里、到哪里、走哪条道路中的哪条车道等问题;自主驾驶是在智能系统控制下,完成车道保持、超车并道、红灯停绿灯行、灯语笛语交互等驾驶行为。
2、自动驾驶汽车通过摄像机、激光雷达、毫米波雷达、超声波等车载传感器来感知周围的环境,依据所获取的信息来进行决策判断,由适当的工作模型来制定相应的策略,如预测本车与其他车辆、行人等在未来一段时间内的运动状态,并进行避碰路径规划;
3、即,智能驾驶遇障碍物转弯的准确性,需要对其进行检测;现有检测遇障碍物转弯方式多是在车内转向系统上加装各种传感器,并进入到测试路段进行转弯检测,行驶中抖动的汽车会对检测的各种传感器有很高的要求,如果性能达不到要求容易造成检测出现误差;因此针对上述问题,特提出了一种智能驾驶遇障碍物转弯检测装置。
技术实现思路
1、技术问题,本实用新型的目的是为了解决现有技术中存在的缺点:现有检测遇障碍物转弯方式多是在车内转向系统上加装各种传感器,并进入到测试路段进行转弯检测,行驶中抖动的汽车会对检测的各种传感器有很高的要求,如果性能达不到要求容易造成检测出现误差,而提出的一种智能驾驶遇障碍物转弯检测装置。
2、具体技术方案为:一种智能驾驶遇障碍物转弯检测装置,包括支撑架,所述支撑架用于架起测试汽车,位于支撑架四周设置有多个车轮转向检测总成,车轮转向检测总成用于支撑起车轮进行智能驾驶遇障碍物转弯检测;车轮转向检测总成包括支撑横板,以及两个固定在支撑横板两端的车轮转向检测组件组成;支撑横板固定在支撑架上,车轮转向检测组件是由车轮毂限位件、车胎支撑台和车轮转向检测底座组成;车轮毂限位件装配在车胎支撑台上,车胎支撑台转动装配在车轮转向检测底座上,车轮毂限位件用于限位在车轮的车轮毂上,车胎支撑台用于支撑起车轮的车胎;在测试汽车遇障碍物后,通过车轮毂限位件、车胎支撑台和车轮在车轮转向检测底座上的转动角度完成转弯检测;测试汽车移动到多个车轮转向检测总成上方,使用车轮毂限位件限位在车轮的车轮毂上,和使用车胎支撑台支撑起车轮的车胎;在测试汽车遇障碍物后,通过车轮毂限位件、车胎支撑台和车轮在车轮转向检测底座上的转动角度完成转弯检测,做到使用多个车轮转向检测总成支撑起车轮进行智能驾驶遇障碍物转弯检测;实现原地稳定检测智能驾驶遇障碍物转弯情况,检测准确度高,检测性能稳定,检测限制条件低;车轮转向检测底座包括旋转柱和检测台,旋转柱一端转动装配在检测台上,另一端固定在车胎支撑台上;旋转柱上固定有支撑柱,支撑柱上固定有按压滑块,按压滑块滑动装配在压力传感环上,压力传感环固定在检测台内部;压力传感环上固定有多个呈环形阵列分布的压力传感器。
3、将测试汽车行驶到支撑架上,使用支撑架将测试汽车架起,并带动测试汽车移动到多个车轮转向检测总成上方,使用车轮毂限位件限位在车轮的车轮毂上,和使用车胎支撑台支撑起车轮的车胎;在测试汽车遇障碍物后,通过车轮毂限位件、车胎支撑台和车轮使用旋转柱在检测台上转动,并带动按压滑块在压力传感环上滑动,通过按压滑块按压在压力传感环上的不同处的压力传感器后,做到测定车轮在车轮转向检测底座上的转动角度,完成使用多个车轮转向检测总成支撑起车轮进行智能驾驶遇障碍物转弯检测;实现原地稳定检测智能驾驶遇障碍物转弯情况,检测准确度高,检测性能稳定,检测限制条件低。
4、在本实用新型的技术方案中,所述车轮转向检测底座还包括底座台和密封环,检测台装配在底座台内部;密封环套设固定在旋转柱上,密封环通过轴承圈转动装配在检测台上;检测台上开设有凹腔,压力传感环装配在凹腔内部。
5、在本实用新型的技术方案中,所述车轮毂限位件包括支撑盘,支撑盘上转动装配有旋转盘,旋转盘上固定有多个夹持臂,多个夹持臂在旋转盘上呈环形阵列分布。
6、进一步的,所述夹持臂包括气缸伸缩杆一,气缸伸缩杆一一端固定在旋转盘上,旋转盘另一端固定有夹板,夹板用于限位在车轮的车轮毂上。
7、优化的,所述车轮毂限位件还包括气缸伸缩杆二,气缸伸缩杆二一端固定在在旋转盘上,气缸伸缩杆二另一端固定有固定横梁,固定横梁上固定有两个呈平行分布的气缸伸缩杆三,气缸伸缩杆三用于固定在车胎支撑台上。
8、在本实用新型的技术方案中,所述车胎支撑台包括车胎支撑台体,位于车胎支撑台体顶部开设有弧形槽,弧形槽内部转动装设有多个辊筒。
9、进一步的,所述辊筒表面设置为光滑状。
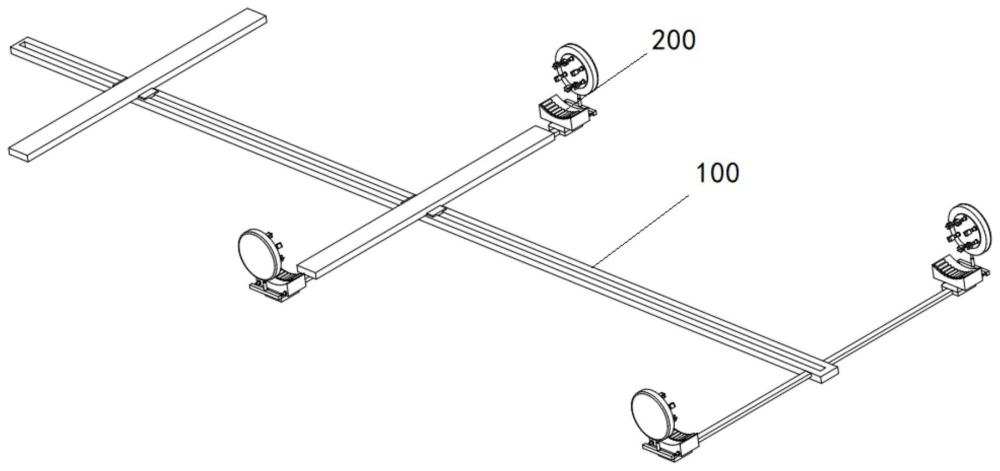
10、在本实用新型的技术方案中,所述支撑架包括滑轨,滑轨上滑动装配有多个支撑板,支撑板与滑轨呈垂直分布。
11、进一步的,所述支撑板与滑轨之间通过移动底座滑动装配,移动底座上加装有气缸,气缸用于调整支撑板高度,去支撑起测试汽车;滑轨内部铺设有导向齿条,导向齿条上啮合有齿轮,齿轮固定在电机的输出轴上。
12、与现有技术相比,本实用新型智能驾驶遇障碍物转弯检测装置可以做到;将测试汽车行驶到支撑架上,使用支撑架将测试汽车架起,并带动测试汽车移动到多个车轮转向检测总成上方,使用车轮毂限位件限位在车轮的车轮毂上,和使用车胎支撑台支撑起车轮的车胎;在测试汽车遇障碍物后,通过车轮毂限位件、车胎支撑台和车轮使用旋转柱在检测台上转动,并带动按压滑块在压力传感环上滑动,通过按压滑块按压在压力传感环上的不同处的压力传感器后,做到测定车轮在车轮转向检测底座上的转动角度,完成使用多个车轮转向检测总成支撑起车轮进行智能驾驶遇障碍物转弯检测;实现原地稳定检测智能驾驶遇障碍物转弯情况,检测准确度高,检测性能稳定,检测限制条件低。
技术特征:
1.一种智能驾驶遇障碍物转弯检测装置,其特征在于,
2.根据权利要求1所述的一种智能驾驶遇障碍物转弯检测装置,其特征在于,
3.根据权利要求1所述的一种智能驾驶遇障碍物转弯检测装置,其特征在于,所述车轮毂限位件(211)包括支撑盘(2111),支撑盘(2111)上转动装配有旋转盘(2112),旋转盘(2112)上固定有多个夹持臂(2113),多个夹持臂(2113)在旋转盘(2112)上呈环形阵列分布。
4.根据权利要求3所述的一种智能驾驶遇障碍物转弯检测装置,其特征在于,所述夹持臂(2113)包括气缸伸缩杆一(21131),气缸伸缩杆一(21131)一端固定在旋转盘(2112)上,旋转盘(2112)另一端固定有夹板(21132),夹板(21132)用于限位在车轮(300)的车轮毂上。
5.根据权利要求4所述的一种智能驾驶遇障碍物转弯检测装置,其特征在于,所述车轮毂限位件(211)还包括气缸伸缩杆二(2114),气缸伸缩杆二(2114)一端固定在旋转盘(2112)上,气缸伸缩杆二(2114)另一端固定有固定横梁(2115),固定横梁(2115)上固定有两个呈平行分布的气缸伸缩杆三(2116),气缸伸缩杆三(2116)用于固定在车胎支撑台(212)上。
6.根据权利要求1所述的一种智能驾驶遇障碍物转弯检测装置,其特征在于,所述车胎支撑台(212)包括车胎支撑台体(2123),位于车胎支撑台体(2123)顶部开设有弧形槽(2121),弧形槽(2121)内部转动装设有多个辊筒(2122)。
7.根据权利要求6所述的一种智能驾驶遇障碍物转弯检测装置,其特征在于,所述辊筒(2122)表面设置为光滑状。
8.根据权利要求1所述的一种智能驾驶遇障碍物转弯检测装置,其特征在于,所述支撑架(100)包括滑轨(130),滑轨(130)上滑动装配有多个支撑板(110),支撑板(110)与滑轨(130)呈垂直分布。
9.根据权利要求8所述的一种智能驾驶遇障碍物转弯检测装置,其特征在于,所述支撑板(110)与滑轨(130)之间通过移动底座(120)滑动装配,移动底座(120)上加装有气缸,气缸用于调整支撑板(110)高度,去支撑起测试汽车;滑轨(130)内部铺设有导向齿条,导向齿条上啮合有齿轮,齿轮固定在电机的输出轴上。
技术总结
本技术适用于智能驾驶检测技术领域,提供了一种智能驾驶遇障碍物转弯检测装置,包括车轮转向检测总成,所述车轮转向检测总成包括支撑横板和车轮转向检测组件组成;支撑横板固定在支撑架上,车轮转向检测组件是由车轮毂限位件、车胎支撑台和车轮转向检测底座组成;车轮转向检测底座包括旋转柱和检测台,旋转柱一端转动装配在检测台上,另一端固定在车胎支撑台上;旋转柱上固定有支撑柱,支撑柱上固定有按压滑块,按压滑块滑动装配在压力传感环上,压力传感环固定在检测台内部;压力传感环上固定有多个呈环形阵列分布的压力传感器;实现原地稳定检测智能驾驶遇障碍物转弯情况,检测准确度高,检测性能稳定,检测限制条件低。
技术研发人员:高峰,曲晓晓,李昂,严杰,李浪,周昌端,温文俊,李党驰
受保护的技术使用者:南方(韶关)智能网联新能源汽车试验检测中心有限公司
技术研发日:20231218
技术公布日:2024/7/15
- 还没有人留言评论。精彩留言会获得点赞!