利用亮度图像增强深度估计的制作方法
本公开总体上涉及深度估计,更具体地说,涉及利用亮度图像增强深度估计。
背景技术:
1、测量深度的一种技术是直接或间接计算信号从传感器上的信号源传播到反射表面并返回传感器所需的时间。行进的时间与传感器到反射表面的距离成正比。这个旅行时间通常被称为飞行时间(tof)。tof传感器可以使用各种类型的信号,最常见的是声音和光。鉴于光在速度、范围、功率和重量方面的优势,一些传感器使用光作为载体。
技术实现思路
技术特征:
1.一种方法,包括:
2.根据权利要求1所述的方法,其中所述目标深度像素和所述亮度像素对应于所述多个像素中的同一像素。
3.根据前述权利要求中任一项所述的方法,其中所述两个adc中的每一个都将来自相应像素的不同模拟信号转换为所述图像数据中的不同数字信号。
4.根据前述权利要求中任一项所述的方法,其中所述两个adc与所述多个像素中的一个或多个其他像素相关联。
5.根据权利要求4所述的方法,其中所述一个或多个其他像素和所述相应像素被布置在所述图像传感器中的同一列中。
6.根据前述权利要求中任一项所述的方法,其中:
7.根据前述权利要求中任一项所述的方法,还包括:
8.根据权利要求7所述的方法,其中所述调制光包括连续的红外波,并且所述连续波具有不同的频率。
9.根据权利要求7或权利要求8所述的方法,还包括:
10.根据权利要求7至9中任一项所述的方法,其中所述反射光是第一反射光,并且所述方法还包括:
11.一种系统,包括:
12.根据权利要求11所述的系统,其中所述目标深度像素和所述亮度像素对应于所述多个像素中的同一像素。
13.根据权利要求11或权利要求12所述的系统,其中所述两个adc中的每一个都将来自相应像素的不同模拟信号转换为所述图像数据中的不同数字信号。
14.根据权利要求11至13中任一项所述的系统,其中所述两个adc与所述多个像素中的一个或多个其他像素相关联。
15.根据权利要求14所述的系统,其中所述一个或多个其他像素和所述相应像素被布置在所述图像传感器中的同一列中。
16.一个或多个非瞬态计算机可读介质,存储可执行以执行操作的指令,所述操作包括:
17.根据权利要求16所述的一个或多个非瞬态计算机可读介质,其中所述目标深度像素和所述亮度像素对应于所述多个像素中的同一像素。
18.根据权利要求16或权利要求17所述的一个或多个非瞬态计算机可读介质,其中所述两个adc中的每一个都将来自相应像素的不同模拟信号转换为所述图像数据中的不同数字信号。
19.根据权利要求16至18中任一项所述的一个或多个非瞬态计算机可读介质,其中所述两个adc与所述多个像素中的一个或多个其他像素相关联。
20.根据权利要求19所述的一个或多个非瞬态计算机可读介质,其中所述一个或多个其他像素和所述相应像素被布置在所述图像传感器中的同一列中。
技术总结
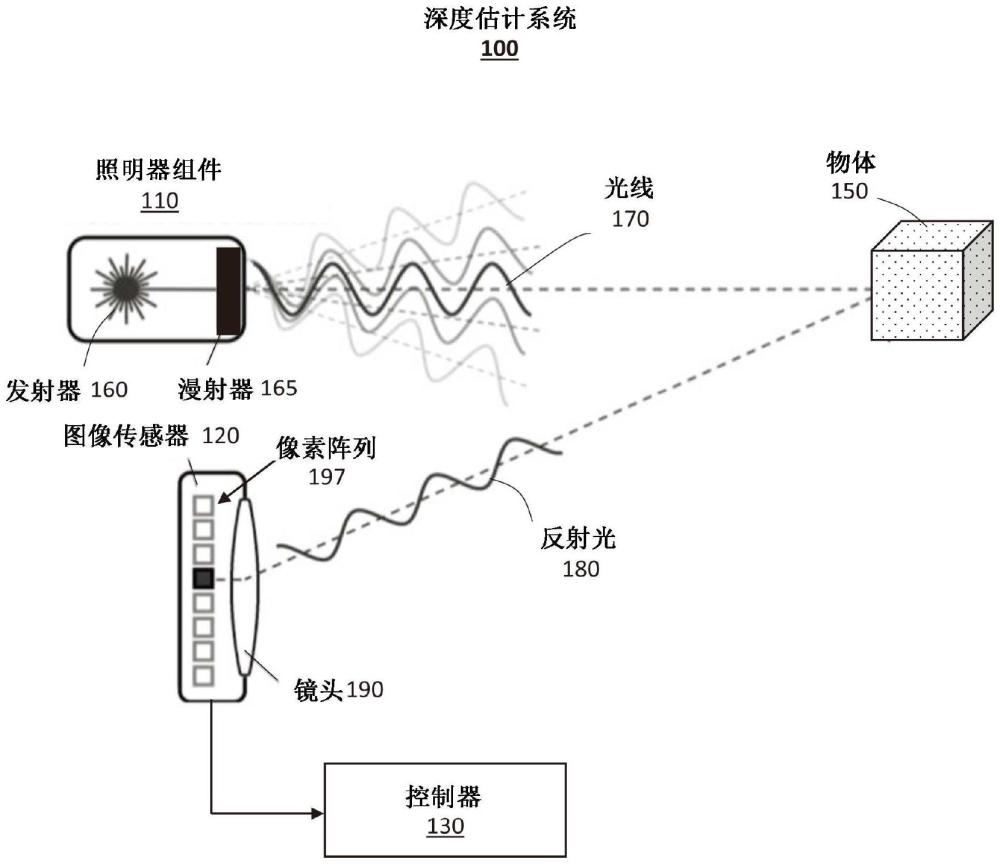
深度估计系统可以使用亮度图像来增强深度估计。光被投射到物体上。该物体反射至少一部分投影光。反射光至少部分地被生成图像数据的图像传感器捕获。深度估计系统可以使用图像数据来生成深度图像和亮度图像。图像传感器包括多个像素,每个像素与两个ADC相关联。ADC从像素接收不同的模拟信号,并输出不同的数字信号。深度估计系统可以使用不同的数字信号来确定亮度图像的亮度像素的亮度值。ADC可以与一个或多个其他像素相关联。像素和一个或多个其他像素可以排列在图像传感器阵列中的同一列中。
技术研发人员:J·卡尔佩马拉维拉,J·E·D·赫维茨,N·勒多特兹
受保护的技术使用者:亚德诺半导体国际无限责任公司
技术研发日:
技术公布日:2024/11/21
- 还没有人留言评论。精彩留言会获得点赞!