用于预测交通参与者的运动的方法与流程
本发明涉及一种根据权利要求1的前序部分所述的用于预测车辆周围环境中的交通参与者的运动的方法。本发明还涉及一种以此类方法预测的交通参与者的运动的用途。
背景技术:
1、在车辆周围环境中可靠地预测交通参与者的行为,对于车辆的自动化,尤其是高度自动化或自动驾驶运行而言至关重要。当自动化车辆系统能够可靠地预测周围交通参与者的行为时,才能够可靠地规划自动化车辆的未来行为。
2、对于此类预测,现有技术中已知多种不同方法。这些方法包括基于光栅图的方法,其中,在光栅图中映射车辆周围环境或部分车辆周围环境,例如道路几何形状和周围交通参与者(也称之为智能体)的运动历史记录。在此,光栅图在鸟瞰图的基础上显示车辆周围环境。需要预测的交通参与者例如位于光栅图的中心。接下来会使用人工神经网络,例如所谓的卷积神经网络(convolutional neural network,缩写为cnn)来处理光栅图的信息,并从中推测待预测的交通参与者的未来轨迹。
3、此类预测交通参与者的运动的方法在“henggang cui et al.:multimodaltrajectory predictions for autonomous driving using deep convolutionalnetworks(使用深度卷积网络的自动驾驶多模态轨迹预测);in:arxiv:1809.10732v2[cs.ro]1mar 2019”中已知。在此,会在车辆或机器人周围环境中预测多个交通参与者的多条可能的轨迹,并且对其概率进行估算。接下来,将每个交通参与者的周围环境背景编码至光栅图中,由深度人工神经网络使用该光栅图,以便为交通参与者自动推导出轨迹。在此,光栅图具有指定数量的光栅单元和与rgb图相符的三个图层。这些图层既包含静态基础设施,例如道路,也包含动态信息,例如待预测的交通参与者及周围交通参与者的历史运动。
技术实现思路
1、本发明的目的是提供一种新颖的预测交通参与者的运动的方法,以及一种以此类方法预测的交通参与者的运动的用途。
2、根据本发明,该目的通过具有权利要求1中所述特征的方法和具有权利要求6中所述特征的用途来实现。
3、本发明的有利的设计方案是从属权利要求的主题。
4、在用于预测车辆周围环境中的交通参与者的运动的方法中,交通参与者的周围环境以具有预定义数量的光栅单元的光栅图的形式示出,其中,将光栅图作为输入信息提供给人工神经网络,并且借助神经网络由输入信息预测交通参与者的轨迹。
5、根据本发明,为了缩放光栅图的显示区域,根据交通参与者的速度动态地缩放光栅单元的比例尺。使用光栅图来显示交通参与者周围环境的区域,与在交通参与者低速移动时相比,所述区域在交通参与者高速移动时更大。
6、借助本方法和显示区域(也称之为视野范围)的动态缩放,在基于光栅图的方法中,以特别有利的方式避免在光栅图分辨率已给定的情况下(例如256像素×256像素)在人工神经网络的训练过程之前就必须定义该光栅图在现实世界中覆盖哪个显示区域,例如50米×50米。这样一来,同样无需预定义地指定由光栅图的单个光栅单元覆盖的显示区域。
7、这样一来,无需定义已确定且不变的显示区域,并且也无需寻求妥协,而在预定义选择光栅图的显示区域时则会发生这一妥协。这是因为:由于针对待预测的交通参与者(例如高速公路上的车辆)的高速行驶情况动态指定显示区域,借助本方法会覆盖尽可能大的显示区域,以便将道路几何形状及周围的远离待预测的交通参与者的交通参与者同样纳入预测。由于动态指定显示区域,在待预测的交通参与者(例如城市交通中的车辆)速度较低时,通过本方法同样可以选择较小的显示区域,以便能够尽可能详细地采集所有附近的环境信息。
8、特别有利地,能够相应地扩展现有的预测方法,以实现本方法。
9、也就是说,借助本方法能够消除基于光栅图的预测方法的主要缺点,即预定义指定光栅图的显示区域,继而消除因此而导致的问题。在此,本方法使显示区域不再受限制,并且对于低速和高速运动不必做出任何妥协。另一优点在于,对于交通参与者的高速情况,同样无需自动增大光栅图的分辨率。
10、在本方法的一种可能的设计方案中,会根据如下公式确定显示区域
11、
12、其中b=显示区域的宽度;
13、l=显示区域的长度;
14、v=交通参与者的速度,以及
15、a=交通参与者的加速度。
16、在此,显示区域的大小并不随着制动行程(即待预测的交通参与者的)线性缩放。例如对于车辆而言,交通参与者的加速度典型值为3m/s2至5m/s2。通过“max”运算符定义50米的下限。
17、在本方法的另一可能的设计方案中,会根据已缩放的显示区域缩放输入信息。这样一来,就能够通过扩展已有预测方法来实现本方法。
18、在本方法的另一可能的设计方案中,将光栅单元比例尺的缩放系数提供给神经网络和/或负责继续处理借助该网络所确定的结果的网络。这样一来,能够换算由必要时缩放的输入信息所确定的结果,继而同样能够通过扩展已有预测方法来实现本方法。
19、在本方法的另一可能的设计方案中,在预测轨迹后将显示区域复位为指定值,从而使显示区域重新处于初始状态。
20、在运行自动化车辆功能的车辆周围环境中,通过根据本发明所述、使用根据前述权利要求中任一项所述的方法预测的交通参与者的运动,基于在车辆周围环境中有利地预测交通参与者,实现了自动化车辆功能尤其准确且可靠的运行,例如车辆的自动化纵向和/或横向调控。
技术特征:
1.一种用于预测车辆周围环境中的交通参与者(v1至vm)的运动的方法,其中,
2.根据权利要求1所述的方法,
3.根据权利要求1或2所述的方法,
4.根据前述权利要求中任一项所述的方法,
5.根据前述权利要求中任一项所述的方法,
6.车辆周围环境中的交通参与者(v1至vm)的运动用于运行自动化车辆功能的用途,所述运动是根据前述权利要求中任一项所述的方法预测的。
技术总结
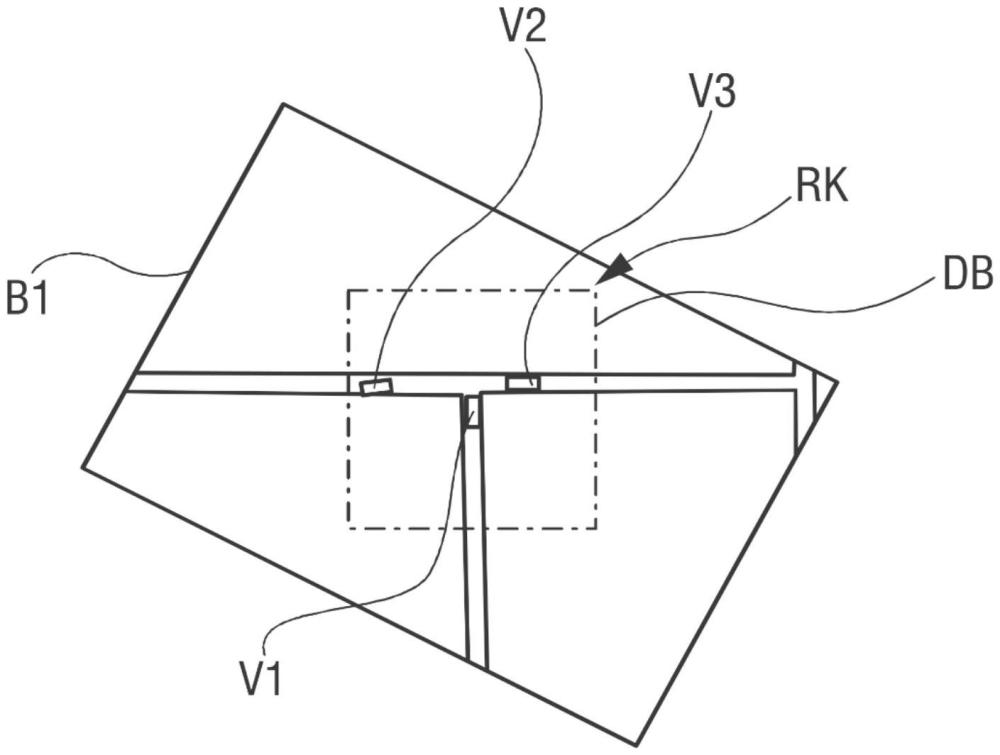
本发明涉及一种用于预测车辆周围环境中的交通参与者(V1至Vm)运动的方法,其中,交通参与者(V1至Vm)的周围环境以具有预定义数量的光栅单元的光栅图(RK)的形式示出,将光栅图(RK)作为输入信息提供给人工神经网络(2),并且借助神经网络(2)从输入信息中预测交通参与者(V1至Vm)的轨迹(T1至Tn)。根据本发明,为了缩放光栅图(RK)的显示区域(DB),会根据交通参与者(V1至Vm)的速度动态地缩放光栅单元的比例尺,其中,使用光栅图(RK)来显示交通参与者(V1至Vm)周围环境的区域,与在交通参与者(V1至Vm)低速移动时相比,所述区域在交通参与者高速移动时更大。本发明还涉及车辆周围环境中的交通参与者(V1至Vm)的运动用于运行自动化车辆功能的用途,所述运动是以此类方法预测的。
技术研发人员:J·施密特,J·鲁普雷希特,F·格雷施奈德,J·乔丹
受保护的技术使用者:梅赛德斯-奔驰集团股份公司
技术研发日:
技术公布日:2025/4/6
- 还没有人留言评论。精彩留言会获得点赞!