一种用于微重力试验微重力水平测量装置的制作方法
本申请涉及属于空间环境模拟试验,特别涉及一种用于微重力试验微重力水平测量装置。
背景技术:
1、目前,国内外主要以微重力落塔开展地基微重力试验,微重力水平覆盖10-2-10-6g。微重力水平是微重力落塔试验系统的首要指标,也是影响微重力试验的关键因素。然而,在微重力测量方面,美国、德国和日本等国家,落塔的微重力水平是用高精度加速度计进行测量,而国内并无用于高微重力水平落塔微重力试验的抗冲击高精度加速度计,这就使得国内的微重力水平测量没有得到很好的解决,无法直接解决最小10-6g微重力水平测量关键技术问题。
2、因此,发明一种用于微重力试验微重力水平测量装置来解决上述问题很有必要。
3、在背景技术中公开的上述信息仅用于加强对本申请的背景的理解,因此其可能包含没有形成为本领域普通技术人员所知晓的现有技术的信息。
技术实现思路
1、针对上述问题,本发明提供了一种用于微重力试验微重力水平测量装置,采用光学非接触测量方法,在微重力环境试验过程中实时测量试验过程中的微重力水平,通过ccd相机获取真空环境下参考落体相对落舱平台下降的相对位移图像,通过图像解算算法获取位移数据,位移测量精度可达到微米级,以解决上述背景技术中提出的问题:
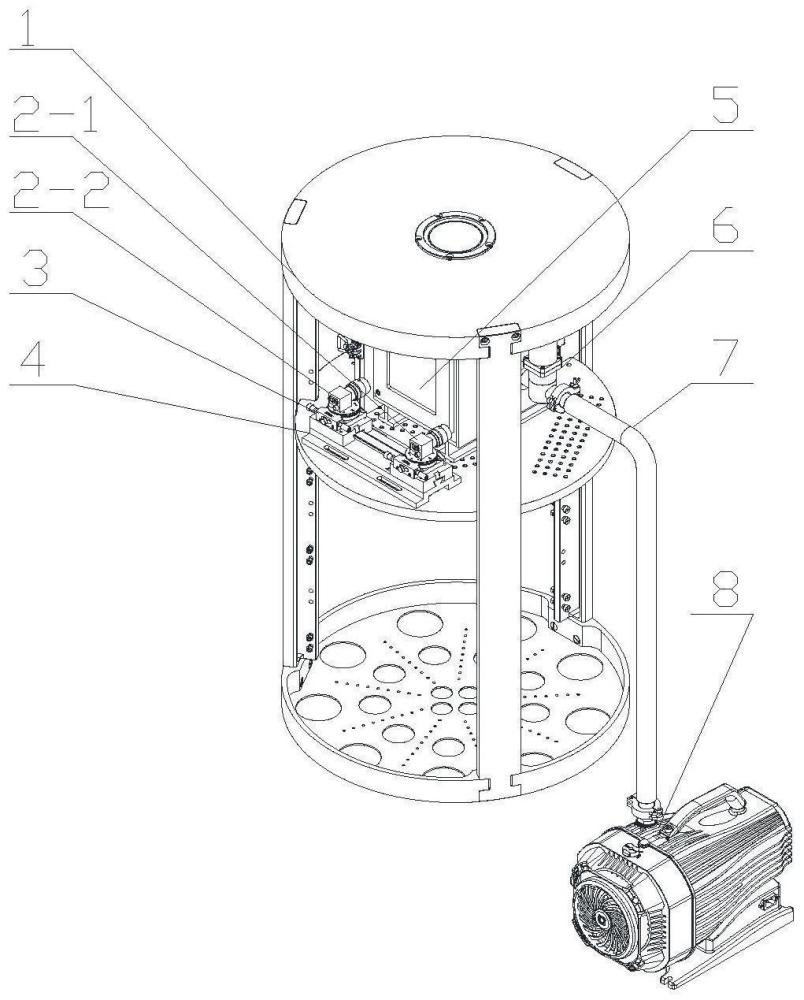
2、为实现上述目的,本发明提供如下技术方案:一种用于微重力试验微重力水平测量装置,包括落舱平台,所述落舱平台内侧安装有真空腔体,真空腔体前侧面两侧分别设置有第一相机和第二相机,且第一相机和第二相机的拍摄端对应真空腔体,第一相机和第二相机安装在水平移动滑台顶面两端,所述水平移动滑台底面设置有水平导轨,水平移动滑台在水平导轨顶部滑动。
3、进一步的,所述第一相机和第二相机均设置为ccd相机。
4、进一步的,所述第一相机和第二相机均外接24v直流电源。
5、进一步的,所述真空腔体一侧面安装有真空阀,且真空阀输出端安装有真空管路,且真空管路输出端连接真空泵输入端。
6、进一步的,所述真空泵外接220v交流电源。
7、进一步的,所述真空腔体后侧面顶部一侧设置有真空计,真空计底部设置有复压口,且真空计一侧设置有航空插头。
8、进一步的,所述真空腔体另一侧面设置有真空舱舱门。
9、进一步的,所述真空腔体内部上顶板安装有齿轮导轨,齿轮导轨底部滑动连接有卡接有安装转接板,安装转接板底部通过螺接方式安装有电磁释放装置。
10、进一步的,所述真空腔体内部设置有参考落体,参考落体处于电磁释放装置底部,且电磁释放装置通过电磁力吸附参考落体。
11、进一步的,所述电磁释放装置外接24v直流电源。
12、本发明的技术效果和优点:
13、1、本发明通过测量参考落体在真空环境下与落舱平台的相对位移,相对位移在下落时间内的加速度即为落舱平台的微重力水平,计算得出落舱平台的微重力水平具有高精度,抗干扰能力强的特点。
14、2、本发明通过多个ccd相机采集不同角度参考落体的下落图像,通过解算算法,可以消除参考落体下落过程偏转引起的测量误差,采用多角度图像采集方法,提高了微重力水平测量装置的精度。
15、3、本发明通过基于数字光栅和散斑光学非接触测量方法,在位移测量方面,微位移测量精度可达到微米级。有效提升了参考落体与落舱平台相对运动位移的测量精度,也反映出高精度微重力水平测量,可达到10-6g。
技术特征:
1.一种用于微重力试验微重力水平测量装置,包括落舱平台(1),其特征在于:所述落舱平台(1)内侧安装有真空腔体(5),真空腔体(5)前侧面两侧分别设置有第一相机(2-1)和第二相机(2-2),且第一相机(2-1)和第二相机(2-2)的拍摄端对应真空腔体(5),第一相机(2-1)和第二相机(2-2)安装在水平移动滑台(3)顶面两端,所述水平移动滑台(3)底面设置有水平导轨(4),水平移动滑台(3)在水平导轨(4)顶部滑动。
2.根据权利要求1所述的用于微重力试验微重力水平测量装置,其特征在于:
3.根据权利要求2所述的用于微重力试验微重力水平测量装置,其特征在于:
4.根据权利要求1所述的用于微重力试验微重力水平测量装置,其特征在于:
5.根据权利要求4所述的用于微重力试验微重力水平测量装置,其特征在于:
6.根据权利要求1所述的用于微重力试验微重力水平测量装置,其特征在于:
7.根据权利要求6所述的用于微重力试验微重力水平测量装置,其特征在于:
8.根据权利要求2所述的用于微重力试验微重力水平测量装置,其特征在于:
9.根据权利要求8所述的用于微重力试验微重力水平测量装置,其特征在于:
10.根据权利要求9所述的用于微重力试验微重力水平测量装置,其特征在于:
技术总结
本发明属于空间环境模拟试验技术领域,尤其公开了一种用于微重力试验微重力水平测量装置,包括落舱平台,所述落舱平台内侧安装有真空腔体,真空腔体前侧面两侧分别设置有第一相机和第二相机,且第一相机和第二相机的拍摄端对应真空腔体,第一相机和第二相机安装在水平移动滑台顶面两端,所述水平移动滑台底面设置有水平导轨,水平移动滑台在水平导轨顶部滑动。本发明通过测量参考落体在真空环境下与落舱平台的相对位移,相对位移在下落时间内的加速度即为落舱平台的微重力水平,计算得出落舱平台的微重力水平具有高精度,抗干扰能力强的特点。
技术研发人员:高飞,宫文然,王梦魁,王冲,王萌,李亚男,贺智国,高魁垠,韩丽
受保护的技术使用者:北京强度环境研究所
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!