一种基于单线激光雷达的托盘识别和捡取的研究方法
本发明涉及叉车自动化托盘识别和捡取,具体涉及到一种基于单线激光雷达的托盘识别和捡取的研究方法。
背景技术:
1、传统物流作业主要依靠人工操作叉车对托盘进行搬运,自动化程度低。随着工业4.0的提出,工厂自动化已经成为了一个非常重要的趋势。在物流行业中,自动叉车可以快速的进行物料和部件的运输,因此对托盘自动识别系统的研究能提高工厂生产效率。目前物流托盘的识别和检测主要通过传感器来实现,主要的传感器有激光雷达,深度相机等。激光雷达分为单线和多线激光雷达,多线激光雷达可以同时获取多个扫描线的数据,从而提供更丰富的点云信息和更高的分辨率。这使得它能够更准确地捕捉和表示托盘的细节和形状特征。但是,相对于单线激光雷达,多线激光雷达通常具有更高的成本,这可能对一些预算有限的应用造成限制。由于多线激光雷达产生的数据量更大,数据处理和算法设计的复杂性也相应增加,需要更强的计算能力和算法设计来处理和分析多线激光雷达的数据。单线激光雷达通常只需要一个激光束进行扫描,可以提供基本的距离和角度测量,能够捕捉到托盘的大致位置和形状信息,相应的硬件和传感器成本更为经济实惠。此外,单线激光雷达产生的点云数据量相对较小,减少了数据处理和算法计算的复杂性,提高了系统的实时性和响应速度。在一些场景中,如托盘的位置较为明显、环境较为简单的情况下,对于一些简单的识别任务,单线激光雷达已经足够满足需求。
技术实现思路
1、为了提高叉车的自动化程度,降低物流行业中托盘检测的成本,本发明的目的在于提供一种基于单线激光雷达的托盘识别和捡取的研究方法,具体涉及到单线激光雷达的点云分割、托盘特征匹配和叉车精确控制。
2、为实现上述目的,本发明提供了一种基于单线激光雷达的托盘识别和捡取的研究方法,包括下列步骤:
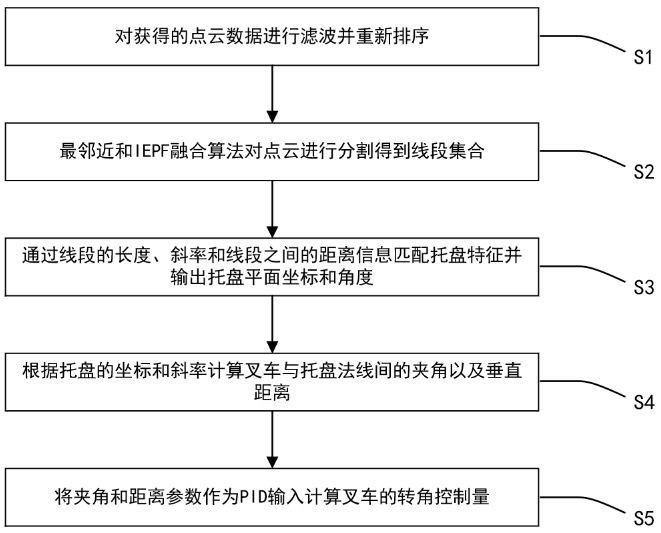
3、步骤1:对获得的点云数据进行滤波并重新排序;
4、步骤2:最邻近和iepf融合算法对点云进行分割得到线段集合;
5、步骤3:通过线段的长度、斜率和线段之间的距离信息匹配托盘特征并输出托盘平面坐标和角度;
6、步骤4:根据托盘的坐标和斜率计算叉车与托盘法线间的夹角以及垂直距离;
7、步骤5:将夹角和距离参数作为pid输入计算叉车的转角控制量。
8、可选的,在点云数据预处阶段,首先对串口接受到的单线激光雷达点云数据进行滤波,主要滤除点距离为0的数据,然后从点云数据第一个点开始计算相邻两个点的距离,将第一次距离大于一定阈值的点作为起始点,按照激光雷达扫描的先后对点云数据进行排序并添加索引。
9、可选的,通过最邻近提取点云中的断点,在得到断点的基础上通过iepf融合算法提取角点,根据断点和角点的排列顺序将点云分割成若干由点组成的线条集合。
10、可选的,通过最近邻算法寻找点云数据中的断点,主要计算点云中相邻两点欧式距离是否大于一定阈值,将大于阈值的点作为断点;根据断点将点云划分为若干个由点组成的线条集合,线条有头和尾,因此断点是成对出现的,分为头断点和尾断点,点云中起始点默认作为第一条线的头断点,而终止点作为最后一条线的尾断点。
11、可选的,在划分好的线条集合中,通过iepf算法提取每条线的角点;具体是将每条线头断点和尾断点连接成一条直线,计算该条线上所有点到直线的距离,将最大距离的点视为角点;接着以该角点为分界点将线分为两个部分,对两个部分再次使用iepf算法,找出其中的角点;以此类推,直到最大距离小于一定阈值时停止迭代,最后根据角点和断点将整个点云分割为多个由点组成的线段集合,整个线段集合按照激光雷达扫描的先后排序的。
12、可选的,将托盘的特征简化三条线段,在线段集合中搜索与托盘支柱长度相似,线段之间斜率相近和线段之间距离与托盘支柱空隙长度相似的三条线段作为托盘的特征,输出托盘特征的中间点坐标和角度信息。
13、可选的,在线段集合中先过滤点数小于一定阈值的线段,在剩下的线段集合中筛选出与托盘支柱长度相似的作为特征线段;计算单个特征线段与其周围特征线段端点的距离,筛选出距离与托盘支柱空隙长度相似的作为特征线段2,并记录这两条线段的索引并进行排序得到的索引数组。
14、可选的,在索引数组中,将重复出现的索引所对应的线段假定为托盘中间支柱,在激光雷达的坐标系中,计算该线段以及左右部分区域线段与坐标轴的夹角。记录两者角度差值小于一定阈值的线段,当记录的线段总数为3时(包含假定为托盘中间支柱的线段),将这三条线段作为托盘的特征,计算托盘中间点的坐标和三条线段角度的平均值。
15、可选的,通过上述得到托盘平面坐标和角度,根据这两者计算到托盘法线到原点的距离l,计算公式如
16、
17、其中x,y为托盘中间点的坐标,单位为毫米,a为托盘平面与雷达坐标系中y轴的夹角,单位是度。
18、叉车在捡取托盘的过程中,对应的距离l和夹角a会接近于0,将距离和夹角数据共同用于pid算法的输入,计算叉车的角度控制量angle,计算公式如
19、
20、其中,angle为叉车的角度控制量,为角度修正系数,为距离修正系数。
21、本发明涉及叉车自动化托盘识别和捡取技术领域,具体涉及到一种基于单线激光雷达的托盘识别和捡取的研究方法。首先对获得的点云数据进行滤波并重新排序;通过最邻近和iepf融合算法对点云进行分割得到线段集合;通过线段的长度、斜率和线段之间的距离信息匹配托盘特征并输出托盘平面坐标和角度;根据托盘的坐标和斜率计算叉车与托盘法线间的夹角以及垂直距离;将夹角和距离参数作为pid输入计算叉车的转角控制量。经过实验测试表明,本发明可以实现单线激光雷达的托盘识别以及pid精确控制叉车实现对托盘的捡取。
技术特征:
1.一种基于单线激光雷达的托盘识别和捡取的研究方法,其特征在于,包括下列步骤:
2.如权利要求1所述的基于单线激光雷达的托盘识别和捡取的研究方法,其特征在于,
3.如权利要求1所述的基于单线激光雷达的托盘识别和捡取的研究方法,其特征在于,
4.如权利要求3所述的基于单线激光雷达的托盘识别和捡取的研究方法,其特征在于,
5.如权利要求4所述的基于单线激光雷达的托盘识别和捡取的研究方法,其特征在于,
6.如权利要求1所述的基于单线激光雷达的托盘识别和捡取的研究方法,其特征在于,
7.如权利要求6所述的基于单线激光雷达的托盘识别和捡取的研究方法,其特征在于,
8.如权利要求7所述的基于单线激光雷达的托盘识别和捡取的研究方法,其特征在于,
9.如权利要求1所述的基于单线激光雷达的托盘识别和捡取的研究方法,其特征在于,
10.叉车在捡取托盘的过程中,对应的距离l和夹角a会接近于0,将距离和夹角数据共同用于pid算法的输入,计算叉车的角度控制量angle,计算公式如
技术总结
本发明涉及叉车自动化托盘识别和捡取技术领域,具体涉及到一种基于单线激光雷达的托盘识别和捡取的研究方法。首先对获得的点云数据进行滤波并重新排序;通过最邻近和IEPF融合算法对点云进行分割得到线段集合;通过线段的长度、斜率和线段之间的距离信息匹配托盘特征并输出托盘平面坐标和角度;根据托盘的坐标和斜率计算叉车与托盘法线间的夹角以及垂直距离;将夹角和距离参数作为PID输入计算叉车的转角控制量。经过实验测试表明,本发明可以实现单线激光雷达的托盘识别以及PID精确控制叉车实现对托盘的捡取。
技术研发人员:匡兵,南奔洋,罗先锋
受保护的技术使用者:桂林电子科技大学
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!