用于空间主应变监测的光纤光栅六轴应变传感装置及其多维应变解耦方法
本发明属于光纤光栅应变传感,涉及一种用于空间主应变监测的光纤光栅六轴应变传感装置及其多维应变解耦方法。
背景技术:
1、光纤光栅空间应变传感依赖光纤布拉格光栅(fiber bragg grating,fbg)随着外界施加形变而产生的中心波长偏移,根据标定实验得到的fbg中心波长偏移与应变数学关系确定每个传感单元测量的应变值,并基于空间应变方程通过多个方向的应变值计算被测空间的应变分布情况及主应变。目前光纤光栅空间应变传感装置大多利用多个独立fbg应变传感装置组成阵列,在较大空间内测量不同方向的应变,存在测量点分散、体积大、温度补偿不准确的问题。
2、同时,由于传统测量方法受传感装置结构和布设方式的限制,多个方向之间的应变测量会产生互扰的耦合作用,导致严重测量误差等缺点,无法实现对多个方向的准确测量。因此,提供一种用于空间主应变监测的光纤光栅六轴应变传感装置及其多维应变解耦方法,具有重要意义。
技术实现思路
1、本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种光纤光栅六轴应变传感装置,并基于提出的传感装置提出了一种传感装置多维应变解耦装置及方法。
2、本发明解决其技术问题所采用的技术方案是:
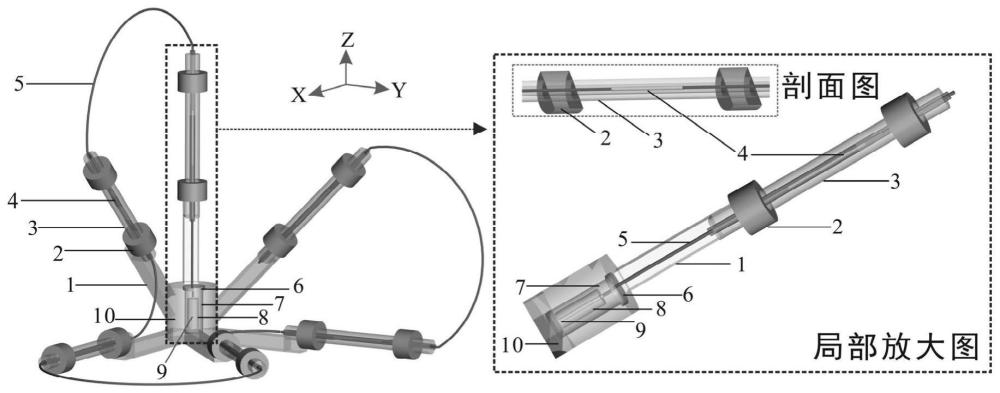
3、一种用于空间主应变监测的光纤光栅六轴应变传感装置,如图1所示,所述的光纤光栅六轴应变传感装置有六个结构相同的应变传感单元,布置于空间中x、y、z、xy、xz、yz六个方向;同时有一个温度传感单元布置在传感器的底座内部,用于传感器应变测量过程中的温度补偿。具体如下:
4、所述的光纤光栅六轴应变传感装置主要由支架1、底座10、布置在六个方向且结构相同的应变传感单元、温度传感单元、光纤5、圆柱形封装结构8、温度fbg9组成,其中,每个应变传感单元包括两个圆盘2、中空圆柱管3、应变fbg4,所述温度传感单元由盖板6、圆柱形空腔7、圆柱形封装结构8组成。除应变fbg4和光纤5外,均是由3d打印一体制造而成,相互之间是一个整体。
5、所述支架1用来支撑空间中x、y、z、xy、xz、yz六个方向的应变传感单元,每个应变传感单元由两个圆盘2、一个中空圆柱管3和被封装在其内的应变fbg4组成。fbg4位于中空圆柱管3的中央,中空圆柱管3两端的应变fbg4通过固定剂与管内壁固定在一起,避免fbg4发生啁啾现象的同时使fbg4在应变测量时能与中空圆柱管3发生同步形变;所述两个圆盘2布置在中空圆柱管3外壁面,中空圆柱管3与两个圆盘2形成类似哑铃的中空结构,圆盘2的作用是在测量过程中防止与被测物发生相对滑动。六个应变传感单元底部固定在底座10上。所述底座10为中空圆柱体结构,其内部嵌套同轴中空圆管,该圆管内设有圆柱形封装结构8和温度fbg9,圆管顶部设有盖板6,盖板中部设有用于通过应变fbg4的通孔,应变fbg4与温度fbg9连接。所述圆柱形封装结构8与盖板6之间存在圆柱形空腔7。
6、七个fbg(包括六个应变fbg4和一个温度fbg9)级联在一起,按照一定的顺序布设在光纤光栅六轴应变传感装置中。首先定义中空圆柱管3靠近底座10的一端为内端,另一端为外端。第一个fbg从yz方向的中空圆柱管3的外端穿入并固定在其内;固定好第一个fbg4后,将从yz外端引出的光纤经过y外端穿入y方向的中空圆柱管3,并将第二个fbg4固定在其内;将从y内端引出的光纤经过xy的内端穿入,并将第三个fbg4固定在其内;将xy外端引出的光纤经过x外端穿入,并将第四个fbg4固定在其内;将从x内端穿出的光纤经过xz的内端穿入,并将第五个fbg4固定在其内;将从xz外端穿出的光纤经过z外端穿入,并将第六个fbg4固定在期内;此时,完成了传感器六个方向应变传感单元的fbg布设。
7、为了剔除测量过程中的温度干扰,在z方向应变传感结构底座10的空腔内布设一个温度fbg9,其只受温度的影响,而不受外界传感装置形变的影响,作为温度传感单元进行温度补偿。温度传感单元设置在底座10中,底座10中有一个圆柱形空腔7。将z内端引出的光纤上的fbg4,穿过圆形带孔的盖板6,再通过固定剂固定到圆柱型封装结构8中。圆柱型封装结构8直径小于空腔7,其中有光纤通过的中空槽。将固定了fbg4的圆柱形封装结构8放置在空腔7中,并通过盖板6将空腔内密封,使空腔内的被封装好的fbg4只受温度影响,不受外力的影响,从而形成传感器的温度传感单元。
8、最终设计的光纤光栅六轴应变传感装置,可以将被测物内部空间中x、y、z、xy、xz、yz六个方向的应变,转换成传感器级联fbg的中心波长值(λfbg)变化,实现测量。其原理为:
9、由于温度和应变对λfbg的影响是独立且线性的(如公式1),
10、δλfbg=ktδt+kεδε (1)
11、其中,kt表示fbg的温度系数,kε表示fbg的应变系数,δt和δε分别表示温度和应变的变化量。因此可以根据传感器中温度传感单元的中心波长偏移量计算被测物温度,从而剔除六个方向应变传感单元由温度引起的中心波长偏移,实现对应变测量的温度补偿。根据传感装置中七点级联fbg的中心波长变化,可以得到空间中x、y、z、xy、xz、yz六个方向的应变(εx,εy,εz,εxy,εxz,εyz),如公式(2),其中,t0和ε0是温度和应变的初始值。公式(2)为所设计的六轴应变传感装置的数学模型。
12、
13、将传感装置测得的一组六个方向应变值代入到公式(3)中,可以得到表征空间应变的六个应变基本分量(εx、εy、εz、γxy、γyz、γxz)。
14、γxy=2εxy-εx-εy
15、γyz=2εyz-εy-εz (3)
16、γzx=2εzx-εz-εx
17、其中,γxy、γyz、γzx分别表示空间中xy平面、yz平面、zx平面发生的剪切应变。已知这六个应变基本分量,就可以求被测点在任意截面上的正应变和切应变。因此通过上述六个应变分量可以完全确定该点在三维空间中的应变状态。将其代入到空间主应变方程(4)中
18、ε3-i1ε2+i2ε-i3=0 (4)
19、公式(4)中i1、i2、i3分别为应变张量第一、第二、第三不变量,可由公式(5)计算求出。
20、
21、根据公式(5)求解空间主应变方程(4),可以得到第一主应变ε1、第二主应变ε2、第三主应变ε3的大小。为了判断主应变的方向,引入主应变方向余弦方程组(6)
22、
23、将ε1、ε2、ε3依次代入公式(6)中的εi,可以计算得到该主应变与x、y、z三个坐标轴夹角的方向余弦值l,m,n,且满足如下关系:
24、l2+m2+n2=1 (7)
25、根据主应变在坐标轴上的余玄值,根据(7)可以计算其与各坐标轴的角度,θx表示与x轴的夹角度数,θy表示与y轴的夹角度数,θz表示与z轴的夹角度数。根据主应变的大小和方向,可以最终确定三维空间中的主应变分布情况。
26、θx=arccosl l∈[-1,1]
27、θy=arccosm m∈[-1,1] (8)
28、θz=arccosn n∈[-1,1]
29、为了提高多维应变传感装置的应变传感精度,在测量时必须考虑空间中六个个传感方向之间的测量互扰问题。因此,本发明在提出六轴应变传感装置的基础上,同时设计了一种多维应变解耦的装置及方法。具体如下:
30、一种用于多维应变解耦的标定装置,如图2所示,用于固定上述光纤光栅六轴应变传感装置,并对其六个方向的应变传感单元进行多维应变标定。所述的多维应变解耦标定装置包括底部的固定板11、微位移电控箱12、标定轴13、可移动滑块14、连接杆15、夹具16。所述固定板11作为整个解耦标定装置的基座,在使用过程中不会移动,以减小在解耦标定过程中由于装置本身抖动引起的误差。微位移电控箱12与固定板11通过螺丝紧密固定在一起,并与六个方向布置的标定轴13相连接;每个标定轴13上设有两个可移动滑块14,每个可移动滑块14可以在微位移电控箱12的控制下,独立地沿着标定轴13移动;每个可移动滑块14上有一个连接杆15,将夹具16固定在可移动滑块14上,可以随其沿着标定轴13移动,。六轴应变传感夹具每个方向应变传感单元的圆盘2都可以放入相应方向的夹具16,夹具16用于固定六个方向的应变传感单元;在多维应变解耦标定的过程中,通过夹具16带动光纤光栅六轴应变传感装置中的圆盘2发生移动,从而对应变传感单元施加位移载荷。
31、微位移电控箱12是整个解耦标定装置的中控部分,可以独立控制各个方向上的夹具16移动,夹具16可以在微位移电控箱12控制下发生压缩或拉伸位移,也可以处于不受力的自由状态;模拟空间中多个方向发生的复杂应变。采用多维应变解耦标定装置对六轴应变传感装置进行多方向应变标定实验,将得到的完整标定数据(传感单元的应变与fbg4的中心波长偏移量),代入到bp-神经网络算法中可以实现传感器的多维应变解耦。
32、一种用于多维应变解耦方法,基于上述标定装置实现,具体方法为:
33、第一步,将光纤光栅六轴应变传感装置如图2所示在解耦装置上固定好,将圆盘2放置到对应方向的夹具16中可以随其移动而发生形变。控制解耦夹具16对六轴应变传感装置中x方向传感单元施加拉伸应变和压缩应变,记为tx和cx。
34、第二步,对六轴应变传感器的单一应变传感单元进行标定:
35、控制x方向的两个夹具16带动传感单元上的两个圆盘2移动,其他五个方向的夹具不移动,使y、z、xy、xz、yz方向的应变传感单元保持在自由状态,不受力的作用。先通过微位移电控箱12控制x方向两夹具16相互靠近一定距离,对该方向应变传感单元施加压缩应变(cx),然后再使夹具16相互远离一定距离,对该方向的应变传感单元施加拉伸应变(tx),共2种标定组合,同时记录此过程中六个方向应变传感单元被施加的应变值和其fbg4中心波长的偏移量。
36、类似的,依次对其他五个方向的单一应变传感单元进行标定,并得到相应的标定数据。所有单一应变传感单元的标定数据记为s1,共有12种标定组合。
37、第三步,对六轴应变传感器的两个应变传感单元进行标定:
38、控制解耦装置上x、y方向的夹具16带动该方向的应变传感单元圆盘2,对传感器x、y方向的应变传感单元同时施加应变,其他方向的应变传感单元处于自由状态,不受外力作用。应变施加的顺序为:cx-cy(即传感器x方向传感单元被压缩的同时,y方向传感单元也被压缩)、cx-ty、ty-cy、ty-ty,共4个标定组合。同时记录整个过程中六个方向应变传感单元被施加的应变值和其fbg4中心波长的偏移量,得到x和y方向传感单元同时发生应变时,传感器六个传感单元的fbg4中心波长响应规律。
39、类似的,依次对其他x-z、x-xy、x-xz、x-yz、y-z、y-xy、y-xz、y-yz、z-xy、z-xz、z-yz、xy-xz、xy--yz、xz-yz共十五组两个应变传感单元同时发生应变时共的情况进行标定。所有两个应变传感单元同时标定数据记为s2,共60个标定组合。
40、第四步,对六轴应变传感器的三个应变传感单元同时进行标定:
41、利用解耦装置的夹具16同时对x、y、z方向的应变传感单元同时施加应变,其顺序为cx-cy-cz、cx-cy-tz、cx-ty-cz、cx-ty-tz、tx-cy-cz、tx-cy-tz、tx-ty-cz、tx-ty-tz共8个标定组合。同时记录整个过程中六个方向应变传感单元被施加的应变值和其fbg4中心波长的偏移量,得到x、y、z方向传感单元同时发生应变时,传感器六个传感单元的fbg4中心波长响应规律。
42、类似的,依次对x-y-xy、x-y-xz、x-y-yz、y-z-xy、y-z-xz、y-z-yz、z-xy-xz、z-xy-yz、……、xy-xz-yz共二十组方向的应变传感单元同时施加应变。所有三个应变传感单元同时发生应变的标定数据记为s3,共160个标定组合。
43、第五步,对六轴应变传感器的四个应变传感单元同时进行标定:
44、用解耦装置的夹具16同时对x、y、z、xy方向的应变传感单元同时施加应变,其顺序为cx-cy-cz-cxy、cx-cy-cz-txy、cx-cy-tz-cxy、cx-cy-tz-txy、cx-ty-cz-cxy、cx-ty-cz-txy、cx-cy-tz-cxy、cx-cy-tz-txy、tx-cy-cz-cxy、tx-cy-cz-txy、tx-cy-tz-cxy、tx-cy-tz-txy、tx-ty-cz-cxy、tx-ty-cz-txy、tx-cy-tz-cxy、tx-cy-tz-txy、共16个标定组合,同时记录整个过程中六个方向应变传感单元被施加的应变值和其fbg4中心波长的偏移量,得到x、y、z、xy方向传感单元同时发生应变时,传感器六个传感单元的fbg4中心波长响应规律。
45、类似的,依次对x-y-z-xz、x-y-z-yz、y-z-xy-xz、y-z-xy-yz、……、z-xy-xz-yz共十五组方向的应变传感单元施加应变进行标定。所有四个应变传感单元同时发生应变的标定数据记为s4,共240个标定组合。
46、第六步,对六轴应变传感器的五个应变传感单元同时进行标定:
47、用解耦装置的夹具16同时对x、y、z、xy、xz方向的应变传感单元同时施加应变,其顺序为cx-cy-cz-cxy-cxz、cx-cy-cz-cxy-txz、……、tx-ty-tz-txy-txz,共计32个标定组合,同时记录整个过程中六个方向应变传感单元被施加的应变值和其fbg4中心波长的偏移量,得到x、y、z、xy、xz方向传感单元同时发生应变时,传感器六个传感单元的fbg4中心波长响应规律。
48、类似的,对y-z-xy-xz-yz、z-xy-xz-yz-x、xy-xz-yz-x-y、xz-yz-x-y-z、yz-x-y-z-xy共六组方向的应变传感单元施加应变进行标定。所有五个应变传感单元同时发生应变的标定数据记为s5,共计192个标定组合。
49、第七步,对六轴应变传感器的六个应变传感单元同时进行标定:
50、用解耦装置的夹具16同时对x、y、z、xy、xz、yz方向的应变传感单元同时施加应变,顺序为cx-cy-cz-cxy-cxz-cyz、cx-cy-cz-cxy-cxz-tyz、……、cx-ty-tz-txy-txz-tyz、tx-ty-tz-txy-txz-tyz,共64个标定组合,同时记录整个过程中六个方向应变传感单元被施加的应变值和其fbg4中心波长的偏移量,得到x、y、z、xy、xz方向传感单元同时发生应变时,传感器六个传感单元的fbg4中心波长响应规律。所有五个应变传感单元同时发生应变的标定数据记为s6,共计64个标定组合。
51、第八步,在完成多维应变标定后,得到的标定数据(s1、s2、s3、s4、s5、s6)中一共包括728个标定组合。每个标定组合都包括此时六个应变传感单元施加的应变和六个应变传感单元中fbg4的中心波长值。将六个fbg4的中心波长作为输入(δλx,δλy,δλz,δλxy,δλxz,δλyz)、将六个施加的应变作为输出(εx,εy,εz,εxy,εxz,εyz),代入到bp-神经网络智能算法中进行模型训练,最终可以得到基于bp-神经网络的传感器应变解耦模型(图3)。
52、在得到传感器应变解耦模型后,当用六轴应变传感器测量空间中的应变值时,可以将传感器的传感信号(δλx,δλy,δλz,δλxy,δλxz,δλyz)代入到解耦模型中,可以得到此时被测物各方向解耦后的更加准确的空间应变(εx,εy,εz,εxy,εxz,εyz)。
53、本发明的有益效果为:
54、本发明通过设计一体化的六轴应变传感器,实现对空间中x、y、z、xy、xz、yz六个方向应变的同时监测,获得被测物内部空间的复杂应变、主应变分布情况。针对六轴应变传感器的结构,设计了一种多维应变解耦装置;并提出根据解耦装置的标定数据,建立了一种基于bp-神经网络的传感器应变解耦模型。本发明可以应用于多维空间应变测量领域,传感器可以有效提高空间多维应变的同步测量,且具有温度自补偿能力;并通过解耦模型克服空间应变测量时多个方向的耦合影响,大幅度提高传感器的测量准确性,具有较好的实用性。
- 还没有人留言评论。精彩留言会获得点赞!