一种无人机路径规划方法
本发明涉及无人机,特别涉及一种无人机路径规划方法。
背景技术:
1、近年来,随着无人机技术的快速迭代,无人机产业的蓬勃发展,无人机也被应用于消防、民用、军事等多种领域。而为了确保无人机可以自主顺利的完成任务,则需要对无人机的飞行路径进行相应的规划,使其在确保安全的前提下,提高任务完成的效率。无人机路径规划是指通过算法、控制等方式,在一定环境中寻找出一条无人机从起始点飞向目标点,并避开途径中所有障碍物的飞行路径。常用的路径规划算法有传统算法,如:人工势场法、模拟退火算法、模糊逻辑算法等;启发式搜索算法,如:a*算法、dijkstra算法等;智能仿生算法,如:灰狼算法、蚁群算法、粒子群算法、遗传算法等。传统路径规划算法大多具有算法简单,稳定性好等特点,但搜索能力受参数影响严重;启发式搜索算法虽然可以规划出最短的路径,但计算效率会随环境规模的扩大而下降;智能仿生算法虽然可以在保证搜索能力的同时保持运算时间,但随着维度和复杂性的增加,大多都有容易陷入局部最优解的缺点,且规划出的航迹过于曲折,需要做平滑处理。
2、以灰狼算法为例,有文献报道了将其与人工势场法相结合的方式来解决局部最优解的问题,例如专利公开号:cn113467472a公开了一种复杂环境下的机器人路径规划方法,其通过改进的灰狼算法,能够快速的搜索到全局最优路径,然后使用人工势场法对局部路径进行规划,从而能够有效的避开静态和动态的障碍物,并最终到达预期的目标点。
3、然而,上述方法在应用于无人机路径规划时会存在以下问题:
4、1、未做平滑处理,规划出的航迹较为曲折;
5、2、模型计算较为复杂,对于灰狼算法,其利用混沌函数对灰狼粒子群进行初始化,并在算法的迭代过程中使用混沌序列对陷入局部最优的粒子进行处理,同时结合粒子的适应度值构建自适应惯性权重;对于人工势场法,需要重构斥力势场函数,并引入相对距离因子,同时,还通过增设虚拟目标点的方法使其跳出局部最优。所以,上述方法所采用的模型,对于无人机的路径规划来说,不仅规划时间较长,而且成本较高。
6、因此,上述方法并不能很好地适配于无人机的路径规划上。
技术实现思路
1、针对上述现有技术的不足,本发明提供了一种无人机路径规划方法,能更好地适配无人机的应用。
2、为实现上述目的,本发明采用的技术方案如下:
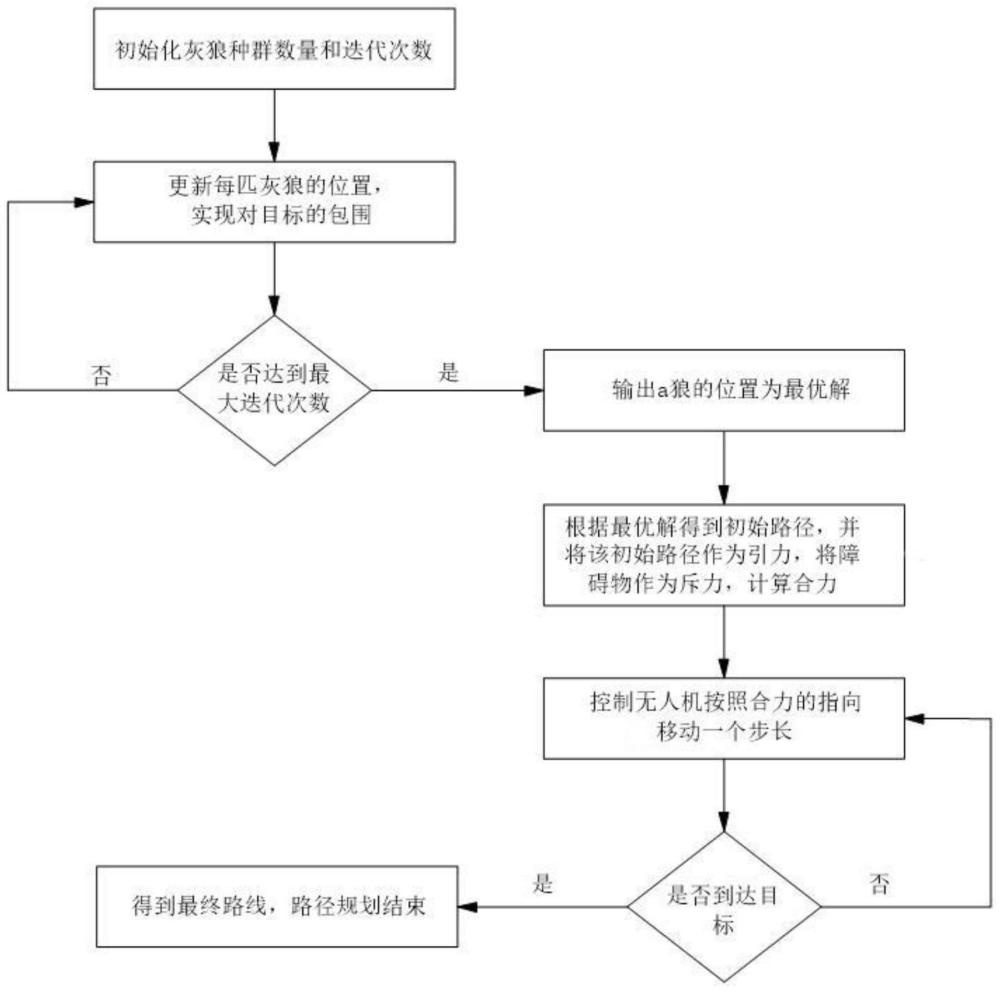
3、一种无人机路径规划方法,包括以下步骤:
4、(1)初始化灰狼种群数量和迭代次数;在灰狼种群中,定义α狼为狼群的领导者,负责带领整个狼群狩猎并进行决策;
5、(2)利用以下公式迭代更新灰狼的位置,实现对目标的包围:
6、
7、
8、式中,代表单只灰狼与猎物的距离;和分别代表灰狼和猎物的位置向量;t为迭代次数;为[0,2]内的随机向量;是的协同向量;
9、(3)判断迭代次数是否达到最大,是,则输出α狼的位置为最优解,然后执行步骤(4);否则返回执行步骤(2);
10、(4)根据步骤(3)的最优解,得到初始路径,然后将该初始路径作为引力,将障碍物作为斥力,并通过人工势场法分别计算目标与无人机之间的引力以及无人机与障碍物之间的斥力,得到无人机所受到的合力;
11、(5)控制无人机按照合力的指向移动一个步长,该步长小于α狼的步长,然后判断无人机是否到达目标,是,则得到最终路线,路径规划结束;否,则控制无人机继续按照合力的指向移动一个步长。
12、具体地,所述步骤(2)中,的计算公式如下:
13、
14、式中,为[0,1]内的随机向量;为收敛因子,其在迭代过程中从2到0线性递减。
15、进一步地,所述步骤(4)中,根据步骤(3)的最优解,采用栅格法建立地图模型,然后将栅格地图上的各节点保存下来,形成初始路径。
16、再进一步地,所述步骤(4)中,计算合力的过程如下:
17、(a)根据以下公式计算目标与无人机之间的引力:
18、
19、式中,uatt(x)为目标与无人机之间的引力势场;katt为位置增益系数;x为无人机位置;xg为目标位置;则无人机与目标之间的引力为uatt(x)的负梯度:
20、fatt(x)=-grad[katt]=-katt(x-xg);
21、(b)根据以下公式计算障碍物对无人机的斥力:
22、
23、式中,urep(x)为障碍物对无人机的斥力势场;krep为斥力增益系数;x-x0为无人机与障碍物的距离;ρ0为障碍物的影响距离;则无人机与障碍物之间的斥力为urep(x)的负梯度:
24、
25、(c)根据(a)、(b)的结果,按照以下公式得到无人机所受到的合力fall:
26、
27、式中,n为障碍物的数量。
28、与现有技术相比,本发明具有以下有益效果:
29、本发明首先使用灰狼算法对无人机路径规划进行初始路径规划,并将栅格地图上的各节点保存下来,作为临时终点,然后再使用人工势场法对该条初始路径进行二次规划,二次规划后,在确保路径平滑度的前提下,控制无人机按照合力的指向移动,直至到达目标,从而得到最终路线。相比现有技术来说,本发明虽然同样采用了“灰狼算法+人工势场法”的融合方案实现无人机路径的规划,但是其整体模型更加简单、计算成本更低,对无人机路径的规划效率更高,路径平滑度更好。
30、而实现上述效果的主要原因在于,一方面,本发明在使用灰狼算法进行路径规划时,仅对约束条件进行了部分修改,保留了最大航程、最大偏向角等约束条件,放松了无人机与障碍物之间的容忍度,并提高了α狼的步长,从而尽可能快的得出一个初始路径;另一方面,根据初始路径调整环境力场,赋予初始路径上的各点引力,不仅避免了由于障碍物斥力过大而陷入局部最优的问题,而且实现了对初始路径的二次优化,并且提高了容忍度,使得规划的路径变得更加平滑。
31、因此,本发明针对无人机路径的规划,具有更好的适配性、稳定性和可靠性,非常适合在无人机路径规划中大规模应用。
技术特征:
1.一种无人机路径规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种无人机路径规划方法,其特征在于,所述步骤(2)中,的计算公式如下:
3.根据权利要求1或2所述的一种无人机路径规划方法,其特征在于,所述步骤(4)中,根据步骤(3)的最优解,采用栅格法建立地图模型,然后将栅格地图上的各节点保存下来,形成初始路径。
4.根据权利要求3所述的一种无人机路径规划方法,其特征在于,所述步骤(4)中,计算合力的过程如下:
技术总结
本发明公开了一种无人机路径规划方法,包括以下步骤:(1)初始化灰狼种群数量和迭代次数;(2)迭代更新灰狼的位置,实现对目标的包围:(3)判断迭代次数是否达到最大,是,则输出α狼的位置为最优解,然后执行步骤(4);(4)根据最优解得到初始路径,然后将该初始路径作为引力,将障碍物作为斥力,并通过人工势场法分别计算目标与无人机之间的引力以及无人机与障碍物之间的斥力,得到无人机所受到的合力;(5)控制无人机按照合力的指向移动一个步长,然后判断无人机是否到达目标,是,则得到最终路线,路径规划结束。本发明模型简单、计算成本低廉,而且规划效率高、路径平滑度更好,能更好地适配无人机的应用。
技术研发人员:韩丹,虞启洲,蒋豪,朱新宇,陈亚青
受保护的技术使用者:中国民用航空飞行学院
技术研发日:
技术公布日:2024/5/27
- 还没有人留言评论。精彩留言会获得点赞!