一种定位坐标修正方法及装置与流程
本文涉及高精度定位技术,尤指一种定位坐标修正方法及装置。
背景技术:
1、随着全球导航卫星系统(global navigation satellite system,gnss)技术的应用场景不断变化,gnss定位精度和稳定性较差,以及受环境影响较大的缺点逐渐显露。
2、相关技术中,为了更好的消除误差且提高定位精度,往往采用引入实时差分定位(real-time kinematic,rtk)技术进行处理。rtk通过在地面建设参考基准站,参考基准站接收卫星载波信号来获取观测数据,并将其与测绘数据处理为差分数据,通过无线通信网络广播给覆盖范围内的接收机。接收机收到参考基准站差分数据后,结合自身观测数据,调用rtk解算算法,修正观测数据误差,从而获得厘米级的定位。
3、然而,这种处理方式在完全遮蔽或严重遮蔽的场景,由于卫星信号不佳,无法输出准确的定位数据,因此无法实现定位坐标修正。
技术实现思路
1、本申请提供了一种定位坐标修正方法及装置,能够在完全遮蔽或严重遮蔽的场景导致的卫星信号不佳的情况下实现定位坐标修正。
2、一方面,本申请提供了一种定位坐标修正方法,所述方法包括:
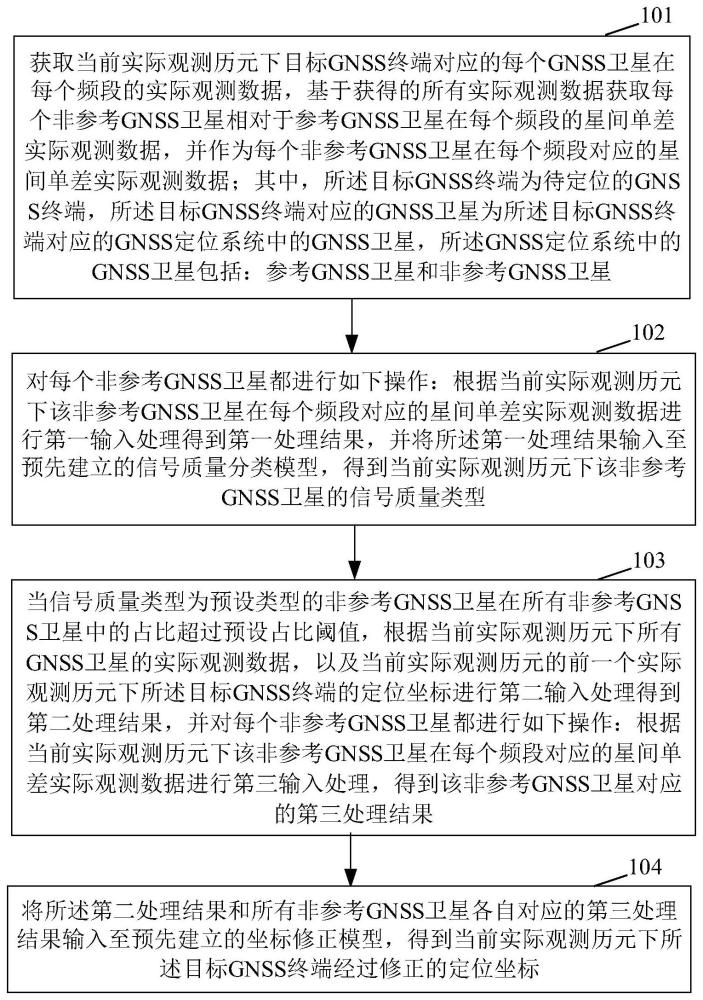
3、获取当前实际观测历元下目标gnss终端对应的每个gnss卫星在每个频段的实际观测数据,基于获得的所有实际观测数据获取每个非参考gnss卫星相对于参考gnss卫星在每个频段的星间单差实际观测数据,并作为每个非参考gnss卫星在每个频段对应的星间单差实际观测数据;其中,所述目标gnss终端为待定位的gnss终端,所述目标gnss终端对应的gnss卫星为所述目标gnss终端对应的gnss定位系统中的gnss卫星,所述gnss定位系统中的gnss卫星包括:参考gnss卫星和非参考gnss卫星;
4、对每个非参考gnss卫星都进行如下操作:根据当前实际观测历元下该非参考gnss卫星在每个频段对应的星间单差实际观测数据进行第一输入处理得到第一处理结果,并将所述第一处理结果输入至预先建立的信号质量分类模型,得到当前实际观测历元下该非参考gnss卫星的信号质量类型;
5、当信号质量类型为预设类型的非参考gnss卫星在所有非参考gnss卫星中的占比超过预设占比阈值,根据当前实际观测历元下所有gnss卫星的实际观测数据,以及当前实际观测历元的前一个实际观测历元下所述目标gnss终端的定位坐标进行第二输入处理得到第二处理结果,并对每个非参考gnss卫星都进行如下操作:根据当前实际观测历元下该非参考gnss卫星在每个频段对应的星间单差实际观测数据进行第三输入处理,得到该非参考gnss卫星对应的第三处理结果;
6、将所述第二处理结果和所有非参考gnss卫星各自对应的第三处理结果输入至预先建立的坐标修正模型,得到当前实际观测历元下所述目标gnss终端经过修正的定位坐标。
7、另一方面,本申请提供了一种定位坐标修正装置,包括:存储器和处理器,所述存储器用于保存可执行程序;
8、所述处理器用于读取执行所述可执行程序,以实现如上所述的定位坐标修正方法。
9、与相关技术相比,本申请包括获取当前实际观测历元下目标gnss终端对应的每个gnss卫星在每个频段的实际观测数据,基于获得的所有实际观测数据获取每个非参考gnss卫星相对于参考gnss卫星在每个频段的星间单差实际观测数据,并作为每个非参考gnss卫星在每个频段对应的星间单差实际观测数据;其中,所述目标gnss终端为待定位的gnss终端,所述目标gnss终端对应的gnss卫星为所述目标gnss终端对应的gnss定位系统中的卫星,所述gnss定位系统中的卫星包括:参考gnss卫星和非参考gnss卫星;对每个非参考gnss卫星都进行如下操作:根据当前实际观测历元下该非参考gnss卫星在每个频段对应的星间单差实际观测数据进行第一输入处理得到第一处理结果,并将所述第一处理结果输入至预先建立的信号质量分类模型,得到该非参考gnss卫星对应的信号质量类型;当信号质量类型为预设类型的非参考gnss卫星在所有非参考gnss卫星中的占比超过预设占比阈值,根据当前实际观测历元下所有gnss卫星的实际观测数据,以及在当前实际观测历元的前一个实际观测历元下所述目标gnss终端的定位坐标进行第二输出处理得到第二处理结果,并对每个非参考gnss卫星都进行如下操作:根据当前实际观测历元下该非参考gnss卫星在每个频段对应的星间单差实际观测数据进行第三输入处理,得到该非参考gnss卫星对应的第三处理结果;将所述第二处理结果和所有非参考gnss卫星各自对应的第三处理结果输入至预先建立的坐标修正模型,得到当前实际观测历元下所述目标gnss终端经过修正的定位坐标。本申请实施例先利用预先构建的信号总质量分类模型获取当前实际观测历元中所有gnss卫星的信号质量类型,当信号质量类型为预设类型的非参考gnss卫星在所有非参考gnss卫星中的占比超过预设占比阈值时,再采用预先建立的坐标修正模型对定位坐标进行修正。因此在完全遮蔽或严重遮蔽的场景导致的卫星信号不佳的情况下实现了定位坐标修正,从而有效提升了复杂环境下的实时授时精度。
10、本申请的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本申请而了解。本申请的其他优点可通过在说明书以及附图中所描述的方案来实现和获得。
11、本申请的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本申请而了解。本申请的其他优点可通过在说明书以及附图中所描述的方案来实现和获得。
技术特征:
1.一种定位坐标修正方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述信号质量分类模型通过以下方式建立:
3.根据权利要求2所述的方法,其特征在于,所述第一神经网络模型包括:lstm神经网络模型,在对所述lstm神经网络模型进行训练得到所述信号质量分类模型的过程中采用交叉熵损失函数作为损失函数;
4.根据权利要求2所述的方法,其特征在于,所述坐标修正模型通过以下方式建立:
5.根据权利要求4所述的方法,其特征在于,所述第二神经网络模型包括:基于多分支cnn模型和swin transformer模型,并借助预先设计的融合模块构建的特征融合神经网络模型;其中,所述融合模块用于融合所述多分支cnn模型和所述swin transformer模型的编码特征;
6.根据权利要求5所述的方法,其特征在于,所述特征融合神经网络模型包括:5层神经网络,5层神经网络中每两层神经网络之间采用leaky relu激活函数连接,第一层为输入层,最后一层为输出层,其中三层均为隐藏层,所述融合模块基于其中三层隐藏层设计得到。
7.根据权利要求5或6所述的方法,其特征在于,所述融合模块包括:第一合并处理单元、插值处理单元、第一卷积单元、第一激活处理单元、第二合并处理单元、第二卷积单元、批归一化处理单元和第二激活处理单元;
8.根据权利要求7所述的方法,其特征在于,所述融合模块还包括:自适应平均化处理单元、第三合并单元、第一线性连接器、第二线性连接器和第三卷积单元;
9.根据权利要求1所述的方法,其特征在于,所述根据当前实际观测历元下该非参考gnss卫星在每个频段对应的星间单差实际观测数据进行第一输入处理得到第一处理结果,包括:
10.根据权利要求1所述的方法,其特征在于,所述根据当前实际观测历元下所有gnss卫星的实际观测数据,以及当前实际观测历元的前一个实际观测历元对应的定位坐标进行第二输入处理得到第二处理结果,包括:
11.根据权利要求10所述的方法,其特征在于,若当前实际观测历元的前一个实际观测历元下获得的信号质量类型为预设类型的非参考gnss卫星在所有非参考gnss卫星中的占比超过所述预设占比阈值,所述当前实际观测历元的前一个实际观测历元下所述目标gnss终端的定位坐标包括:当前实际观测历元的前一个实际观测历元下所述目标gnss终端的经过所述坐标修正模型修正的定位坐标;
12.根据权利要求1、4、10或11所述的方法,其特征在于,所述定位坐标的类型包括:基于大地坐标系得到的定位坐标和基于地固坐标系得到的定位坐标。
13.根据权利要求4或10所述的方法,其特征在于,所述观测数据属性包括:所述观测数据的伪距观测值、载噪比、载波相位、残差、多普勒频移和钟差。
14.根据权利要求1、2、4、9或11所述的方法,其特征在于,所述频段的种类包括:l1频段、l2频段和l5频段。
15.根据权利要求3或10所述的方法,其特征在于,所述基于双频段的第一多路径效应误差,包括:基于l1频段和l2频段的第一多路径效应误差;
16.一种定位坐标修正装置,其特征在于,包括:存储器和处理器,所述存储器用于保存可执行程序;
技术总结
一种定位坐标修正方法及装置,包括:获取当前实际观测历元下目标GNSS终端对应的每个GNSS卫星在每个频段的实际观测数据,获取每个非参考卫星相对于参考卫星在每个频段的星间单差实际观测数据;根据获得的数据进行第一输入处理并将获得的第一处理结果输入至信号质量分类模型,得到对应的信号质量类型;当信号质量类型为预设类型的非参考卫星在所有非参考卫星中的占比超过预设阈值,进行第二输入处理得到第二处理结果,进行第三输入处理得到每个非参考卫星的第三处理结果;将第二、第三处理结果输入至坐标修正模型,得到经过修正的定位坐标。本申请实施例能够在遮蔽场景导致卫星信号不佳的情况下实现定位坐标修正,从而提升了实时授时精度。
技术研发人员:王国桢,林涛
受保护的技术使用者:河南芯港半导体有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!