一种电动挖掘机轴承数据不平衡故障诊断方法
本发明涉及轨道工程机械,具体涉及一种电动挖掘机轴承数据不平衡故障诊断方法。
背景技术:
1、电动挖掘机作为新能源工程机械中的一种,可以实现传统柴油挖掘机的所有功能。通过电机驱动,实现近零排放,得到了快速地发展。电动挖掘机永磁同步电机轴承作为电动挖掘机的关键部件之一,其健康状态直接关系到电动挖掘机的运行安全。随着轴承性能的不断退化,运行失效的概率会逐渐增大,容易导致相关部件的性能失效,对出行人员的安全构成巨大威胁。因此,对轴承的健康状态进行分析和诊断,对于保障电动挖掘机的安全性运行具有重要的意义。
2、近些年来,基于深度学习的方法在轴承的故障诊断领域得到了广泛的研究。在电动挖掘机轴承的实际运行过程中,由于安全性和可靠性要求,电动挖掘机轴承往往处于健康状态。因此,在采集到的振动信号数据中,正常样本的数量远远多于故障样本的数量,数据不可避免地呈现出不平衡的特性。直接使用不平衡数据集训练故障诊断模型时,大多数传统的故障诊断模型的诊断性能可能会显著下降,难以满足实际诊断的要求,数据不平衡问题已成为机械故障诊断领域的一个研究热点和挑战。
技术实现思路
1、本发明的目的在于提供一种电动挖掘机轴承数据不平衡故障诊断方法,旨在解决现有基于深度学习的方法在轴承的故障诊断领域在数据不平衡工况下诊断精度低的问题。
2、为实现上述目的,本发明提供了一种电动挖掘机轴承数据不平衡故障诊断方法,包括下列步骤:
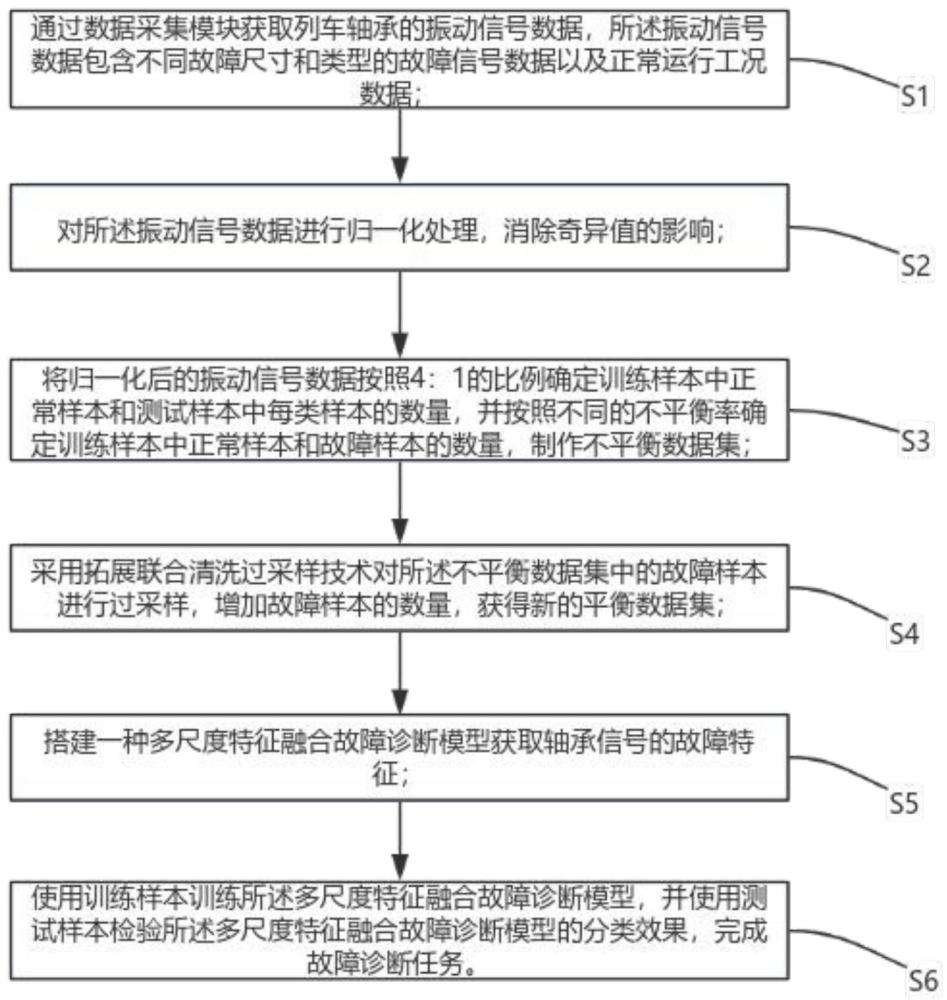
3、步骤1:通过数据采集模块获取电动挖掘机轴承的振动信号数据,所述振动信号数据包含不同故障尺寸和类型的故障信号数据以及正常运行工况数据;
4、步骤2:对所述振动信号数据进行归一化处理,消除奇异值的影响;
5、步骤3:将归一化后的振动信号数据按照4:1的比例确定训练样本中正常样本和测试样本中每类样本的数量,并按照不同的不平衡率确定训练样本中正常样本和故障样本的数量,制作不平衡数据集;
6、步骤4:采用拓展联合清洗过采样技术对所述不平衡数据集中的故障样本进行过采样,增加故障样本的数量,获得新的平衡数据集;
7、步骤5:搭建一种多尺度特征融合故障诊断模型获取轴承信号的故障特征;
8、步骤6:使用训练样本训练所述多尺度特征融合故障诊断模型,并使用测试样本检验所述多尺度特征融合故障诊断模型的分类效果,完成故障诊断任务。
9、可选的,步骤2中进行归一化处理的方法如以下公式所示:
10、
11、其中,zi为输入信号;zimin表示信号数据的最小值;zimax表示信号数据的最大值;n代表振动信号中数据点的数量;zine表示归一化后的信号数据。
12、可选的,在步骤3中按照不同的不平衡率确定正常样本和故障样本的数量时,每种故障样本之间的数量相同,得到具有多种不平衡率的不平衡数据集。
13、可选的,步骤4中将不平衡数据集转化为平衡数据集的过程,包括下列步骤:
14、步骤4.1:将所有少数类故障样本根据其数量进行降序排序;
15、步骤4.2:对每个类别的少数类故障样本,构造包含正常样本集合{sn}和少数类故障样本集合{smin}的新集合{s'};
16、步骤4.3:利用拓展联合清洗过采样技术对每种少数类故障样本进行过采样处理,将合成样本与该类故障样本的原始样本结合,得到一个新的故障样本集合;最后将所有类别故障样本的新集合和正常样本组合,获得一个新的平衡数据集{snew}。
17、可选的,所述拓展联合清洗过采样技术分为清洗阶段和重采样阶段,实现步骤如下:
18、清洗阶段中假设给定的少数类故障样本为ai,关联球体的当前球径为ri,fn(ri)表示球心为ai和球径为ri的球体中包含的正常样本的数量,目标球径为ri',则球径为ri'的球体内正常样本的数量为fn(ri'),球径由ri变到ri',球体膨胀引起的能量变化为δe,fn(ri')和δe可分别由以下式子表示,其中,*表示乘法运算操作;
19、fn(ri')=fn(ri)+1
20、δe=-(ri'-ri)*fn(ri')
21、重采样阶段中,对集合{s'}中的每个故障样本ai,其余样本根据其到ai的距离进行升序排列,得到集合κ(ai)={ai1,ai2,...,ai(|s'|-1)},其中,|s'|表示集合{s'}中所有样本的数量。计算ai与其距离最近的正常样本的距离dmaj,计算ai与其距离最近的故障样本的距离dmin,若dmin≥dmaj,采用下式对清洁区域内的故障样本进行过采样,得到故障样本对应的过采样集合{sni};
22、sni=ai+v
23、其中,v表示球径为ri的零心球中的一个随机点,sni代表过采样得到的样本。
24、若dmin<dmaj,采用下式对清洁区域内的故障样本进行过采样,得到故障样本对应的过采样集合{sni};
25、sni=ai+η(as-ai)
26、其中,η为随机数且η∈[0,1],as表示候选辅助种子ε(ai)中的一个随机样本。
27、可选的,在步骤5中,所述的多尺度特征融合故障诊断模型主要由卷积层、多尺度特征提取模块和全局平均池化层等构成。多尺度特征提取模块的实现过程如下:先采用一个卷积核大小为1×1的卷积层初步提取信号的特征信息,将获取的特征信息沿着通道方向平均分成四个特征子集ei(i=1,2,3,4),采用轻量化中点残差模块提取每个特征子集的特征信息,再将提取的信息融合整理,最后,结合坐标注意力机制和残差连接策略进一步提取轴承的故障特征。轻量化中点残差模块由四个深度可分离卷积层构成,采用两种不同的身份映射方式。先采用两个深度可分离卷积层获取输入特征x的信息,并采用第一个身份映射进行残差连接。然后,再采用两个深度可分离卷积层获取第一次残差连接后得到的信息。最后,采用第二个身份映射再次进行残差连接,得到轻量化中点残差模块的输出。
28、可选的,步骤6中,采用准确率指标评价所述多尺度特征融合故障诊断模型的故障诊断效果,测试样本的准确率越高,表明所述多尺度特征融合故障诊断模型的故障诊断性能越强。
29、本发明提供了一种电动挖掘机轴承数据不平衡故障诊断方法,通过加速度传感器获取电动挖掘机轴承的振动信号数据;将获取的信号数据进行归一化处理,消除信号数据中奇异值的影响;将归一化后的数据按照一定的比例确定正常样本和故障样本的数量,形成具有多种不平衡率的数据集;采用拓展联合清洗过采样方法对不平衡数据集中的故障样本进行自适应过采样,增加故障样本的数量,实现故障样本和正常样本数量之间的平衡,获得新的平衡数据集;同时搭建一种基于多尺度特征融合的故障诊断模型,使用训练样本充分训练故障诊断模型,采用训练好的诊断模型实现轴承的故障诊断任务。通过结合数据增强技术与深度学习方法,本发明实现了电动挖掘机轴承数据不平衡故障诊断任务下更佳的诊断性能。
技术特征:
1.一种电动挖掘机轴承数据不平衡故障诊断方法,其特征在于,包括下列步骤:
2.如权利要求1所述的电动挖掘机轴承数据不平衡故障诊断方法,其特征在于,
3.如权利要求2所述的电动挖掘机轴承数据不平衡故障诊断方法,其特征在于,
4.如权利要求3所述的电动挖掘机轴承数据不平衡故障诊断方法,其特征在于,
5.如权利要求4所述的电动挖掘机轴承数据不平衡故障诊断方法,其特征在于,
6.如权利要求5所述的电动挖掘机轴承数据不平衡故障诊断方法,其特征在于,
7.如权利要求6所述的电动挖掘机轴承数据不平衡故障诊断方法,其特征在于,
8.如权利要求7所述的电动挖掘机轴承数据不平衡故障诊断方法,其特征在于,
技术总结
本发明涉及轨道工程机械技术领域,具体涉及一种电动挖掘机轴承数据不平衡故障诊断方法,通过加速度传感器获取电动挖掘机轴承的振动信号数据;将获取的信号数据进行归一化处理,消除信号数据中奇异值的影响;将归一化后的数据按照一定的比例确定正常样本和故障样本的数量,形成具有多种不平衡率的数据集;采用拓展联合清洗过采样方法对不平衡数据集中的故障样本进行自适应过采样,增加故障样本的数量,获得新的平衡数据集;同时搭建一种基于多尺度特征融合的故障诊断模型,使用训练样本充分训练故障诊断模型,采用训练好的诊断模型实现轴承的故障诊断任务。本发明实现了电动挖掘机轴承数据不平衡故障诊断任务下更佳的诊断性能。
技术研发人员:贺德强,贺昌富,靳震震,吴金鑫,钟豪,李嘉懿,徐远,王彦博
受保护的技术使用者:广西大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!