一种基于多帧信息关联的杂波分类器训练和实现方法与流程
本发明属于达目标检测。
背景技术:
1、在雷达信号处理或者数据处理中,可以应用基于机器学习的深度神经网络对回波进行检测,检测的目的是检出一帧视频图像中存在的目标位置及类别。其中一类经典的算法被称为“二阶段”检测算法,以rcnn、fast-rcnn、faster-rcnn为典型代表。典型二阶段检测算法分为两阶段,第一阶段是目标定位阶段,使用一系列尺寸各异的候选框遍历回波图像,根据候选框内图像的目标置信度确定回波点的位置;第二阶段是根据回波点的位置,在回波上取出一个合适大小的切片,判断切片图像是杂波还是目标。
2、在应用基于机器学习的深度神经网络对回波进行检测前,必须对神经网络进行训练,需要海量的包含目标的视频切片和包含杂波的视频切片,将视频切片进行类别标记后,送入神经网络进行训练。训练完成后可以应用于实时回波检测。
3、传统的训练样本数据需要人工进行标记,效率低下,需要消耗大量的人力,操作员识别而且随着雷达工作环境的变化,已经训练好的神经网络模型不一定适应新的工作环境。因此有必要研究在雷达检测领域的深度神经网络能够实现自学习自训练。
技术实现思路
1、在雷达目标检测领域,利用基于机器学习的深度神经网络对目标检测时,需要人工对海量带有标记的训练数据进行标绘。而人在对帧回波数据标记的过程中,若回避的图像中云雨杂波或海杂波严重,会出现目标回波当成杂波送入训练器的问题,导致训练器不收敛或者检测性能不稳定。基于上述问题,本发明提出一种基于多帧信息关联的杂波分类器训练和实现方法。
2、本发明提出的一种基于多帧信息关联的杂波分类器训练和实现方法,包括以下步骤:
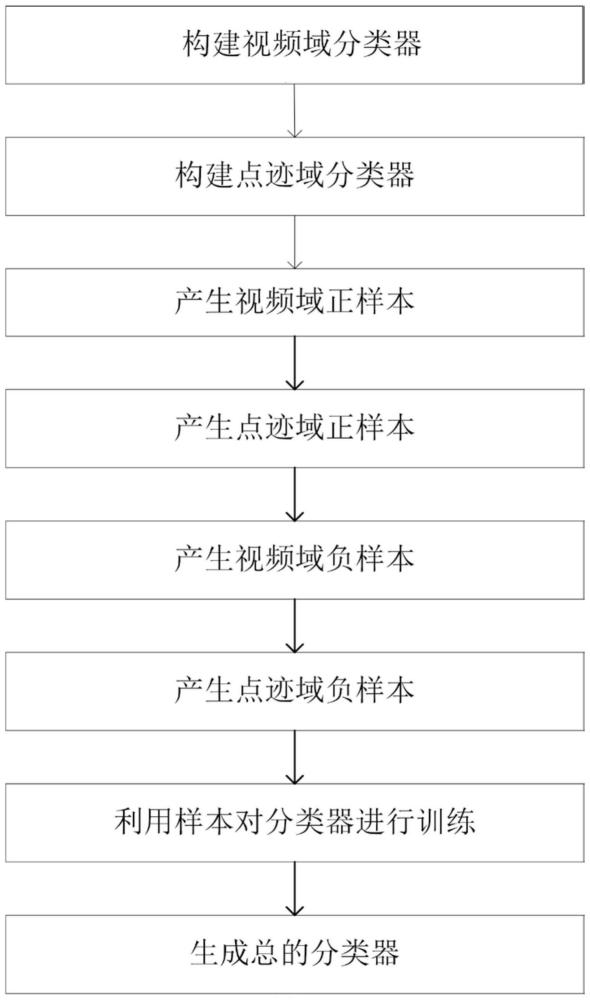
3、步骤1:利用卷积神经网络构建杂波分类器:
4、所述杂波分类器由两个子分类器组成:基于卷积神经网络的视频域分类器和基于卷积神经网络的的点迹域分类器;视频域分类器的输入为雷达一次视频回波切片,输出为相似度得分s_video,s_video范围为0-10,0对应杂波,10对应目标;点迹域分类器的输入为点迹的:幅度dot_amp、速度dot_v、方位范围azi_span、俯仰范围ele_span、距离展宽dist_span、方位包络azi_enve、仰角包络ele_enve、距离包络dist_enve、回波个数_dot_num,输出为目标相似度得分s_dot,s_dot范围为0-10,0对应杂波,10对应目标;
5、步骤2:基于多帧信息关联产生训练样本:
6、样本产生分为两个模块,模块一产生目标样本,称为训练的正样本,模块二产生杂波样本,称为训练的负样本:
7、步骤2-1:对雷达视频进行cfar检测后,形成点迹,利用逻辑法对潜在目标进行自动起始,为了防止起始虚假航迹,采用严格的起始准则,保证起始的目标不存在虚假目标,目标起始成功后,回溯该航迹的几个点,将这几个点标记为点迹域正样本;找到该点对应的帧数据,根据目标的方位和距离找到目标中心,以此为中心,取出30*60的视频点,并将此视频切片标记为视频域正样本;
8、步骤2-2:采用宽松的自动起始条件,保证所有的目标都能够起始,利用相邻五圈的点迹进行起始,当序贯处理到第n圈时,对n-5圈的数据进行标记,防止本圈目标还没来的及起始,而被误判为杂波,通过起始后的数据,没有起始的点作为标记为点迹域负样本,该点对应的视频切片标记为视频域负样本;
9、步骤3:利用步骤2生成的正样本和负样本对视频域分类器和点迹域分类器进行训练;
10、步骤4:生成总分类器
11、对于同一可以点采用视频域分类器和点迹域分类器联合进行判决,最终得分为两个分类器的加权得分;
12、进一步的,总的分类器的得分为:
13、s=a_video*s_video+a_dot*s_dot;
14、其中a_video为视频分类器加权系数,a_dot为点迹域分类器加权系数,且满足:
15、a_vide+a_dot=1;
16、s的取值范围为0-10,其中s>5判断为目标,否则判断为杂波。
17、本发明的有益效果为:
18、本发明利用多帧信息关联,结合传统的目标自动起始算法,在生成正样本的时候,采用严格的起始准则,保证起始的目标虚假少,样本的正确率高。当生成负样本时,采用宽松的起始准则,保证所有的目标都能起始,那剩下的就是杂波,杂波的样本纯度高。因此本发明可以降低人工标注的作业量,另外通过联合视频域和点迹域两个分类器生成总的分类器,能够提升分类的准确率。
技术特征:
1.一种基于多帧信息关联的杂波分类器训练和实现方法,其特征在于:
2.根据权利要求1所述的一种基于多帧信息关联的杂波分类器训练和实现方法,其特征在于:所述步骤4的总分类器构建方法包括:
技术总结
本发明涉及一种基于多帧信息关联的杂波分类器训练和实现方法,属于雷达目标跟踪领域,针对的是对基于学习的目标分类器进行训练,进行数据标注,效率低下的问题,采用的技术途径包括:用卷积神经网络构建杂波分类器;基于多帧信息关联产生训练样本,样本产生分为两个模块,模块一产生训练的正样本,模块二产生训练的负样本;利用正样本和负样本对视频域分类器和点迹域分类器进行训练;对于同一可以点采用视频域分类器和点迹域分类器联合进行判决。本发明能够实现分类器的自主训练,减少人的参与,提高了训练效率。
技术研发人员:李纪三,陈稳,侯娇,曹阳,姜小祥
受保护的技术使用者:中国船舶集团有限公司第七二四研究所
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!