一种用于汽车移动路面模拟的姿态调整与约束系统
本发明涉及路面模拟领域,特别是一种用于汽车移动路面模拟的姿态调整与约束系统。
背景技术:
1、整个汽车行业都在朝着降低二氧化碳排放和提高能源效率的方向发展,特别是对于更高的驾驶速度,这可以通过最小化空气动力阻力来实现。此外,空气动力下压力对于维持甚至提高车辆的操纵性能是至关重要的。为了在风洞试验中优化车辆的气动效率,必须正确模拟车辆在道路上行驶的边界条件。地面模拟是每个风洞都要解决的一个重要问题,尤其对于车辆底盘区域的优化。目前,在风洞地板上设置一个或多个移动带的移动路面系统是模拟车辆在道路上行驶过程中复杂边界条件的标准工具。但是,无论哪种方式,汽车车体需要在风场中进行固定。此外,车辆在运动过程中姿态是多样的,并且车辆的行驶高度和俯仰角度与车辆在面临突发状况时的稳定性直接相关。因此,在进行汽车移动路面模拟时,需要有可调节汽车底盘高度和俯仰角度的姿态调整与约束系统。
技术实现思路
1、本发明的目的是提供一种用于汽车移动路面模拟的姿态调整与约束系统,在汽车移动路面模拟时,能够对汽车姿态进行调整。
2、本发明的目的通过以下技术方案来实现:
3、一种用于汽车移动路面模拟的姿态调整与约束系统,包括并排设置的两个支撑基座,及固定在两个支撑基座上端的支撑子系统,支撑子系统贯穿转盘对汽车进行支撑,及安装在支撑子系统上的监测子系统,监测子系统用于检测支撑子系统的位置,使支撑子系统能够适应不同汽车的支撑。
4、所述支撑子系统包括分别连接在两个支撑基座上的两个轮向位移模组,及每个轮向位移模组上连接的两个轴向位移模组,及分别连接在四个轴向位移模组上的四个支撑装置。
5、每个所述轮向位移模组均包括平行固定在支撑基座的上端的两个轮向导轨,及通过轮向滑块滑动在两个轮向导轨上的两个导轨支撑板,及固定在支撑基座上且与两个轮向导轨平行的轮向丝杠,及分别固定在两个导轨支撑板下端的两个轮向螺母座,及固定在导轨支撑板上对轮向螺母座内的螺纹套进行传动的轮向电机,螺纹套螺纹连接在对应的轮向丝杠上。
6、每个所述轮向位移模组均还包括固定在支撑基座上且与轮向导轨平行的轮向光栅,及与该轮向光栅对应的两个轮向读数器,及与两个轮向读数器固定安装的两个轮向读数器连接块,两个轮向读数器连接块分别连接在对应的两个导轨支撑板的下端面。
7、每个所述轴向位移模组均包括固定在导轨支撑板上的两个轴向导轨,及固定在导轨支撑板上的两个轴向丝杠座,及两端转动在两个轴向丝杠座上的轴向丝杠,及通过轴向电机支座固定在导轨支撑板上的轴向电机,轴向电机传动轴向丝杠,及通过轴向滑块滑动在两个两个轴向导轨上的电缸支撑板,及固定在电缸支撑板下端的轴向螺母座,轴向螺母座与轴向丝杠螺纹连接。
8、每个所述轴向位移模组均包括固定在导轨支撑板上与两个轴向导轨平行的轴向光栅,及固定在电缸支撑板下端的轴向读数器连接块,及固定在轴向读数器连接块上的轴向读数器,轴向读数器与轴向光栅对应。
9、每个所述支撑装置均包括固定在电缸支撑板上的电缸支座,及固定在电缸支座上的电缸,及滑动在电缸内的支撑立柱。
10、每个所述支撑装置均还包括安装在电缸支座上的机器视觉相机,及安装在电缸上的纵向位移传感器。
11、所述监测子系统包括分别安装在同一轮向上两个电缸支撑板上的轮向检测块和轮向位移传感器,及安装在同一轴向上的两个电缸支撑板上的轴向检测块和轴向位移传感器。
12、还包括控制子系统用于整体控制。
技术特征:
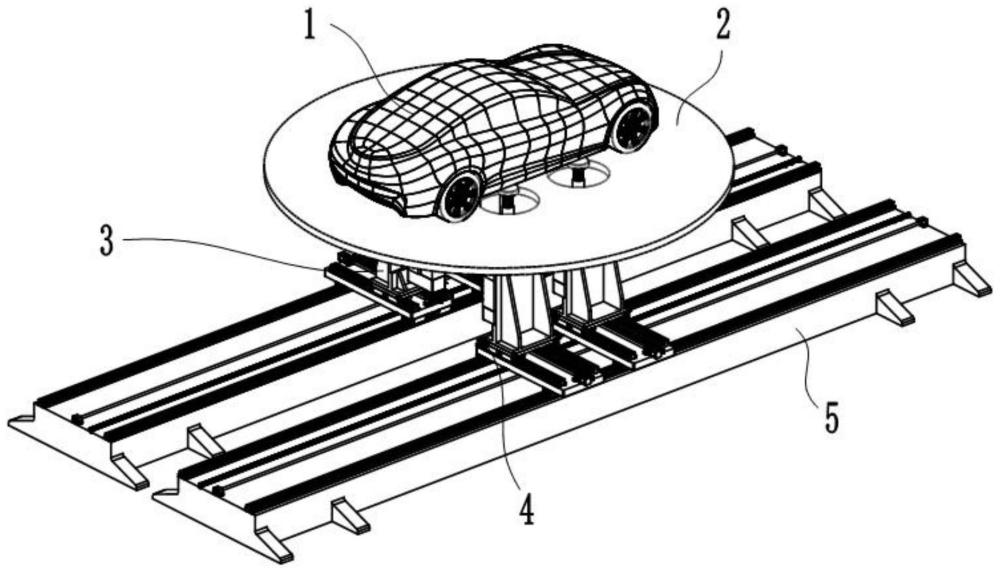
1.一种用于汽车移动路面模拟的姿态调整与约束系统,其特征在于:包括并排设置的两个支撑基座(5),及固定在两个支撑基座(5)上端的支撑子系统(3),支撑子系统(3)贯穿转盘(2)对汽车(1)进行支撑,及安装在支撑子系统(3)上的监测子系统(4),监测子系统(4)用于检测支撑子系统(3)的位置,使支撑子系统(3)能够适应不同汽车的支撑。
2.根据权利要求1所述的一种用于汽车移动路面模拟的姿态调整与约束系统,其特征在于:所述支撑子系统(3)包括分别连接在两个支撑基座(5)上的两个轮向位移模组,及每个轮向位移模组上连接的两个轴向位移模组,及分别连接在四个轴向位移模组上的四个支撑装置(6)。
3.根据权利要求2所述的一种用于汽车移动路面模拟的姿态调整与约束系统,其特征在于:每个所述轮向位移模组均包括平行固定在支撑基座(5)的上端的两个轮向导轨(7),及通过轮向滑块(25)滑动在两个轮向导轨(7)上的两个导轨支撑板(24),及固定在支撑基座(5)上且与两个轮向导轨(7)平行的轮向丝杠(10),及分别固定在两个导轨支撑板(24)下端的两个轮向螺母座(28),及固定在导轨支撑板(24)上对轮向螺母座(28)内的螺纹套进行传动的轮向电机(27),螺纹套螺纹连接在对应的轮向丝杠(10)上。
4.根据权利要求3所述的一种用于汽车移动路面模拟的姿态调整与约束系统,其特征在于:每个所述轮向位移模组均还包括固定在支撑基座(5)上且与轮向导轨(7)平行的轮向光栅(11),及与该轮向光栅(11)对应的两个轮向读数器(30),及与两个轮向读数器(30)固定安装的两个轮向读数器连接块(29),两个轮向读数器连接块(29)分别连接在对应的两个导轨支撑板(24)的下端面。
5.根据权利要求4所述的一种用于汽车移动路面模拟的姿态调整与约束系统,其特征在于:每个所述轴向位移模组均包括固定在导轨支撑板(24)上的两个轴向导轨(8),及固定在导轨支撑板(24)上的两个轴向丝杠座(13),及两端转动在两个轴向丝杠座(13)上的轴向丝杠(12),及通过轴向电机支座(14)固定在导轨支撑板(24)上的轴向电机(15),轴向电机(15)传动轴向丝杠(12),及通过轴向滑块(23)滑动在两个两个轴向导轨(8)上的电缸支撑板(21),及固定在电缸支撑板(21)下端的轴向螺母座(33),轴向螺母座(33)与轴向丝杠(12)螺纹连接。
6.根据权利要求5所述的一种用于汽车移动路面模拟的姿态调整与约束系统,其特征在于:每个所述轴向位移模组均包括固定在导轨支撑板(24)上与两个轴向导轨(8)平行的轴向光栅(9),及固定在电缸支撑板(21)下端的轴向读数器连接块(34),及固定在轴向读数器连接块(34)上的轴向读数器(35),轴向读数器(35)与轴向光栅(9)对应。
7.根据权利要求6所述的一种用于汽车移动路面模拟的姿态调整与约束系统,其特征在于:每个所述支撑装置(6)均包括固定在电缸支撑板(21)上的电缸支座(20),及固定在电缸支座(20)上的电缸(19),及滑动在电缸(19)内的支撑立柱(16)。
8.根据权利要求7所述的一种用于汽车移动路面模拟的姿态调整与约束系统,其特征在于:每个所述支撑装置(6)均还包括安装在电缸支座(20)上的机器视觉相机(17),及安装在电缸(19)上的纵向位移传感器(18)。
9.根据权利要求8所述的一种用于汽车移动路面模拟的姿态调整与约束系统,其特征在于:所述监测子系统(4)包括分别安装在同一轮向上两个电缸支撑板(21)上的轮向检测块(32)和轮向位移传感器(36),及安装在同一轴向上的两个电缸支撑板(21)上的轴向检测块(26)和轴向位移传感器(31)。
10.根据权利要求9所述的一种用于汽车移动路面模拟的姿态调整与约束系统,其特征在于:还包括控制子系统用于整体控制。
技术总结
本发明涉及路面模拟领域,特别是一种用于汽车移动路面模拟的姿态调整与约束系统,包括并排设置的两个支撑基座,及固定在两个支撑基座上端的支撑子系统,支撑子系统贯穿转盘对汽车进行支撑,及安装在支撑子系统上的监测子系统,监测子系统用于检测支撑子系统的位置,使支撑子系统能够适应不同汽车的支撑。所述支撑子系统包括分别连接在两个支撑基座上的两个轮向位移模组,及每个轮向位移模组上连接的两个轴向位移模组,及分别连接在四个轴向位移模组上的四个支撑装置。本发明在汽车移动路面模拟时,能够对汽车姿态进行调整。
技术研发人员:李隆球,刘军民,乔菁,周德开,李朋春,庄仁诚
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!