基于天空区域先验和变换域形态模板匹配的偏振定向方法
本发明属于导航,具体涉及一种基于天空区域先验和变换域形态模板匹配的偏振定向方法。
背景技术:
1、研究表明,单瑞利散射模型预测的偏振角(aop)具有鲁棒性,且包含大量的导航信息,可以完成准确的航向角测量。然而,当前的定向方法往往对局部偏振异常敏感,这将增大计算误差,在诸如树木和建筑物等对象的反射光破坏aop模型的情况下尤其如此。虽然现有技术提出了偏振度梯度等方法,但需要注意的是,这种方法不能识别具有平坦特性的遮挡物。另一个关键问题是,直接使用偏振角(aop)导航会产生太阳模糊问题,因为偏振角的范围只有航向角范围的一半,因此,这种方法需要额外的信息来检测太阳模糊,这无疑增加了导航成本。
技术实现思路
1、发明目的:为了解决现有技术的定向方法受反射光干扰精度较差,以及需要提高导航成本解决太阳模糊的问题,本发明提供一种基于天空区域先验和变换域形态模板匹配的偏振定向方法。
2、技术方案:一种基于天空区域先验和变换域形态模板匹配的偏振定向方法,包括以下步骤:
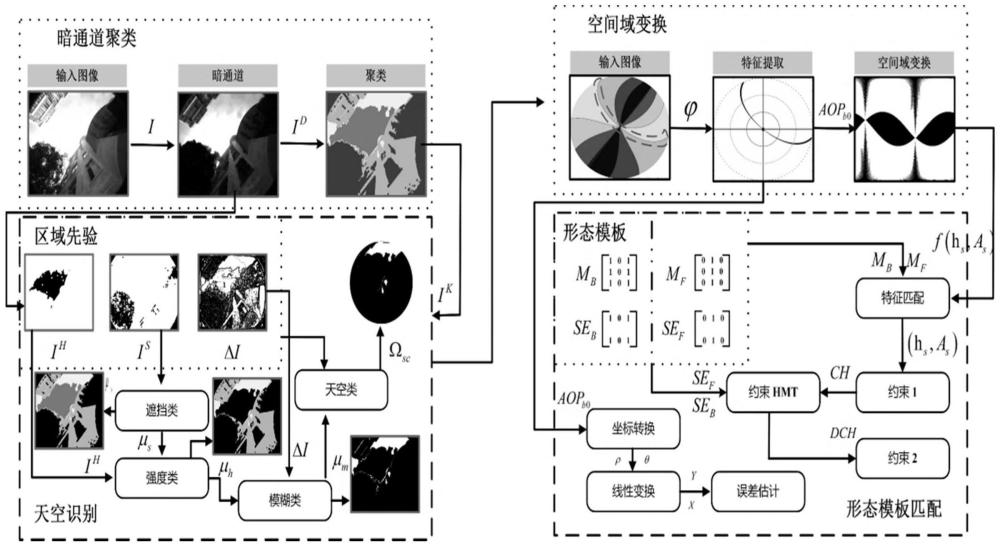
3、(1)利用偏振相机拍摄的0°、45°、90°以及135°图像计算得到偏振暗通道图像、偏振度、偏振度梯度及偏振角梯度,根据偏振暗通道图像计算光强度二值图像、遮挡二值图像,根据偏振度计算偏振度二值图像,根据偏振度梯度和偏振角梯度计算梯度二值图像;
4、(2)根据光强度二值图像、遮挡二值图像设置聚类数;
5、(3)根据设置的聚类数进行偏振暗通道聚类,得到偏振暗通道聚类图,通过偏振暗通道聚类图获取天空区域图像;
6、(4)计算偏振角图像,并对偏振角图像进行特征提取,得到偏振角特征二值图像;
7、(5)分别以(0°,360°]、[-90°,90°]为水平方向和垂直方向构造二维平面,利用空间域变换方法,将偏振角特征二值图像投影到所述二维平面上,得到太阳位置二值特征图;
8、(6)根据太阳位置二值特征图匹配得到太阳位置与反太阳位置,根据太阳位于水平面之上的约束条件,确定真实的太阳位置;
9、(7)忽略瑞利散射模型与真实大气模型之间的差异,计算太阳位置偏差,若偏差小于阈值tm认为检测结果真实可靠;若偏差大于阈值则认为检测结果不可靠;
10、(8)结合偏振角与天空区域图像计算航向角。
11、进一步地,步骤(1)中,偏振暗通道表示为:
12、
13、其中c=[r,g,b,r0,g0,b0,r45,g45,b45,r90,g90,b90,r135,g135,b135]
14、其中,r、g、b分别代表红色、绿色、蓝色通道偏振图像,r*代表*角度红色通道偏振图像。
15、进一步地,步骤(1)中,光强度ih、偏振度idop、遮挡is以及梯度△i的二值图像分别表示为:
16、ih=1(id==imax),
17、idop=1(1%<pd<90%)
18、is=1(id==0)
19、δi=1((δpd+△pa)>t)
20、其中,id表示偏振暗通道图像矩阵中的各元素,imax表示传感器能接受的最大光强,pd表示偏振度,apd表示偏振度梯度,△pa表示偏振角梯度,t为梯度阈值,1代表指示函数。
21、进一步地,步骤(2)中,聚类数的设置方法为:
22、(a)设置聚类数ko的初始值为1;
23、(b)若存在遮挡,将聚类数更新为:
24、
25、(c)设强度阈值为wnm,对于光强度是否超过wnm,将步骤(b)得到的聚类数进一步更新为:
26、
27、进一步地,步骤(3)中,通过偏振暗通道聚类图获取天空区域图像ωsc获取方法为:
28、ωsc=μsc∩δi∩ih∩is
29、其中,μsc代表天空类,μsc=ik(μs==0,μh==0,μm==0)
30、其中,ik代表偏振暗通道聚类图,μs为遮挡类,μh为强度类,μm为模糊类,
31、
32、
33、
34、其中,μ代表由聚类数ko更新出的所有类别的集合,μk代表第k类,k∈(1,2,…k0),nk为第k类中的个体总数。
35、进一步地,步骤(4)中,偏振角特征二值图像aopb0的获取方法为:
36、aopb0(find(ρ==coshscos(θ-as)))=1,
37、其中,find(*)表示满足*的坐标集合,
38、
39、其中,hs为太阳高度角,hp为观测点高度角,ap为观测点方位角。
40、进一步地,步骤(6)中,根据太阳位置二值特征图匹配得到太阳位置与反太阳位置:
41、
42、添加约束项:
43、ξt=ξ,s.t.sign(ξ)>0
44、其中,ξ代表太阳位置,ξ+为水平面上的太阳位置,ξ-为水平面下的太阳位置,为水平面上的太阳高度角,水平面上的太阳方位角,水平面下的太阳高度角,水平面下的太阳方位角,ξt代表真实太阳位置;
45、根据太阳位置与反太阳位置以及约束项,得到真实太阳位置,记为ξt(hs,as)。
46、进一步地,步骤(7)中,所述太阳位置偏差计算为:
47、
48、其中,δ代表太阳位置偏差,δb0代表偏振角特征二值图像aopb0的偏差,代表cos(ap-as),代表cothp,as为太阳方位角。
49、进一步地,步骤(8)中,所述航向角为:
50、
51、
52、其中,θnb为俯仰角,φnb为横滚角,通过额外的传感器测量得到,
53、
54、其中,
55、
56、
57、其中,x、y、z被定义为
58、
59、其中nm为总像素数,eij为量测偏振角,其中{i,j|ωsc(i,j)==1}。
60、有益效果:本发明提供的一种基于天空区域先验和变换域形态模板匹配的偏振定向方法,相比较现有技术,可以在诸如树木和建筑物等对象的反射光干扰的条件下实现航向角测量,误差小,并且不依赖额外的传感器就可以完成高鲁棒的太阳模糊判断,不需要额外增加成本,有效提高了基于大气偏振模式的航向角测量方法的精度与鲁棒性。
61、与现有的基于大气散射光的定向方法相比,本方法将导航信息图像化,提高了定向的鲁棒性;本方法提供了一种偏振角变换域模型,引入模板匹配对二值特征图像进行太阳模糊解算,并在定向前基于偏振暗通道及区域先验给出了准确的天空区域,实现了在部分天空散射光被反射光破坏的情况下的航向角测量。
技术特征:
1.一种基于天空区域先验和变换域形态模板匹配的偏振定向方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于天空区域先验和变换域形态模板匹配的偏振定向方法,其特征在于,步骤(1)中,偏振暗通道表示为:
3.根据权利要求1或2所述的基于天空区域先验和变换域形态模板匹配的偏振定向方法,其特征在于,步骤(1)中,光强度ih、偏振度idop、遮挡is以及梯度δi的二值图像分别表示为:
4.根据权利要求1或2所述的基于天空区域先验和变换域形态模板匹配的偏振定向方法,其特征在于,步骤(2)中,聚类数的设置方法为:
5.根据权利要求3所述的基于天空区域先验和变换域形态模板匹配的偏振定向方法,其特征在于,步骤(3)中,通过偏振暗通道聚类图获取天空区域图像ωsc获取方法为:
6.根据权利要求1或2所述的基于天空区域先验和变换域形态模板匹配的偏振定向方法,其特征在于,步骤(4)中,偏振角特征二值图像aopb0的获取方法为:
7.根据权利要求1或2所述的基于天空区域先验和变换域形态模板匹配的偏振定向方法,其特征在于,步骤(6)中,根据太阳位置二值特征图匹配得到太阳位置与反太阳位置:
8.根据权利要求7所述的基于天空区域先验和变换域形态模板匹配的偏振定向方法,其特征在于,步骤(7)中,所述太阳位置偏差计算为:
9.根据权利要求1或2所述的基于天空区域先验和变换域形态模板匹配的偏振定向方法,其特征在于,步骤(8)中,所述航向角为:
技术总结
本发明公开了一种基于天空区域先验和变换域形态模板匹配的偏振定向方法,通过天空区域先验减少反射光的干扰,通过变换域形态模板匹配(MTMTD)解决太阳模糊。本发明通过天空区域的先验知识,给出了区域划分的标准,并通过对15通道偏振图像中的最暗像素点图像的聚类,完成天空区域的识别。同时,提出的MTMTD策略通过图像化的方法对偏振角图像进行变换域处理,在不依赖额外传感器的条件下解决了单瑞利散射模型下太阳模糊的问题。本发明可在地面/近地面条件下天空条件受到遮挡干扰的情况下完成定向,有效提高了基于大气偏振光的航向测量精度与鲁棒性。
技术研发人员:唐军,吴新冬,申冲,曹慧亮,王晨光,刘俊
受保护的技术使用者:中北大学
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!