一种用于内腔识别的三维扫描机械手及其控制方法与流程
本发明涉及光学计量领域,尤其涉及一种用于内腔识别的三维扫描机械手及其控制方法。
背景技术:
1、三维扫描仪是一种科学仪器,用来侦测并分析现实世界中物体或环境的形状与外观数据,搜集到的数据常被用来进行三维重建计算,可用来计量物体形状。
2、现有技术中,在对部件进行识别的过程中,若部件存在内腔如阀门等,通常需要利用机械手将三维扫描仪深入到阀门内部,进行识别;
3、然而当三维扫描仪插入到阀门内部后,便难以观测到三维扫描仪的具体位置,使得机械手难以将三维扫描仪及时调整到阀门的中间位置上,导致三维扫描仪在移动的过程中容易与阀门内部发生碰撞,从而增大了对阀门内部识别的难度。
4、为此,本发明提出了一种用于内腔识别的三维扫描机械手及其控制方法以解决上述问题。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种用于内腔识别的三维扫描机械手及其控制方法。
2、第一方面、为达到以上目的,本发明采用的技术方案为:一种用于内腔识别的三维扫描机械手,包括:
3、机台,所述机台顶部通过磁吸座将阀门固定在机台顶部;
4、机械手臂,所述机械手臂设置在所述机台顶部,所述机械手臂包括:
5、机壳,所述机壳右侧壁设置有三维扫描仪机体;
6、活动臂组件,所述活动臂组件通过连接组件与所述机壳滑动连接;
7、两组测距组件,其中一组测距组件设置在所述机壳的水平轴线上,另一组测距组件设置在所述机壳的竖直轴线上,每组测距组件均包括:
8、两个测距杆,同一轴线上的两个所述测距杆对称转动在所述机壳的侧壁上,同一轴线的两个所述测距杆相互远离的端部之间的距离与阀门内径相同;
9、旋转驱动机构,所述旋转驱动机构用于驱动所述测距杆进行旋转;
10、在三维扫描仪机体在阀门内部移动进行识别的过程中,通过两组测距组件测量出阀门内部轴线位置,然后机壳和三维扫描仪机体通过连接组件移动调节到阀门内部轴线上,以降低三维扫描仪机体与阀门内壁发生碰撞的机会。
11、优选的,所述连接组件包括:
12、安装壳,所述安装壳与活动臂组件固定连接;
13、两个滑块,两个所述滑块均通过第一弹性连接件竖直滑动连接在所述安装壳内壁两侧;
14、滑动杆,所述滑动杆两端分别与两个所述滑块固定连接,所述滑动杆表面通过第二弹性连接件与所述机壳滑动连接;
15、在测距组件测量阀门内部轴线位置的过程中,受阀门内壁的挤压作用,使得机壳沿着滑动杆表面进行水平滑动或者带动滑动杆沿着安装壳内进行竖直移动,以实现将三维扫描仪机体自主调节至阀门内部轴线上。
16、优选的,所述旋转驱动机构包括:
17、转动座,所述转动座固定连接在所述机壳侧壁上;
18、转动轴,所述转动轴转动连接在所述转动座上,所述转动轴与所述测距杆固定连接;
19、两个自锁马达,两个所述自锁马达固定连接在对应位置的所述转动座上,所述自锁马达的输出轴与转动轴传动连接:
20、通过自锁马达驱动转动轴旋转,以实现测距杆的旋转。
21、优选的,所述机械手臂还包括:
22、四个驱动环,所述驱动环固定连接在对应位置上的所述转动轴的端部,四个所述驱动环内均开设有弧形限位槽;
23、所述自锁马达输出轴表面通过卡块转动连接在所述弧形限位槽内;
24、压力传感器,所述压力传感器固定连接在卡块的侧壁上;
25、复位弹簧,所述复位弹簧的两端分别固定连接在所述弧形限位槽和所述压力传感器上;
26、在机壳移动至阀门内部的弯道的过程中,对应位置上的测距杆受阀门内壁挤压作用发生偏转,使得复位弹簧压缩,从而增加对压力传感器的压力,使得对应位置上的压力传感器获取的压力值进一步增大,活动臂组件根据压力传感器获取到的压力信息的变化进行相应的调节,从而将三维扫描仪机体调节到阀门弯道轴线轨迹上。
27、优选的,所述活动臂组件包括:
28、第一活动臂,所述第一活动臂通过直线驱动机构滑动连接在所述机台顶部;
29、第二活动臂,所述第二活动臂转动连接在所述第一活动臂端部;
30、伺服电机,所述伺服电机固定连接在所述第一活动臂上,所述伺服电机的输出轴与所述第一活动臂同轴固定;
31、第一气缸,所述第一气缸固定连接在所述第二活动臂内部,所述第一气缸的伸缩杆与所述安装壳固定连接;
32、当对应位置上的测距杆受挤压作用发生偏转的过程中,伺服电机启动,通过调节第二活动臂的角度,从而将三维扫描仪机体调节到阀门弯道轴线轨迹上。
33、优选的,所述测距杆包括:
34、杆体,所述杆体端部转动连接有四个滚轮,所述滚轮与阀门内壁接触,以实现机壳在阀门内移动时稳定。
35、优选的,还包括:
36、旋转台,所述旋转台转动连接在所述机台顶部,所述机台内固定连接有驱动电机,所述驱动电机的输出轴与所述旋转台固定连接,所述磁吸座设置在所述旋转台表面。
37、第二方面,一种用于内腔识别的三维扫描机械手的控制方法,包括控制器,所述控制器设置在机械手臂上,该三维扫描机械手控制方法包括以下步骤:
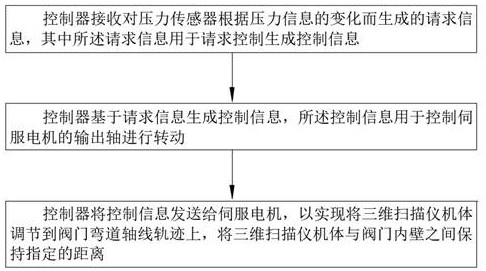
38、控制器接收对压力传感器根据压力信息的变化而生成的请求信息,其中所述请求信息用于请求控制生成控制信息;
39、控制器基于请求信息生成控制信息,所述控制信息用于控制伺服电机的输出轴进行转动;
40、控制器将控制信息发送给伺服电机,以实现将三维扫描仪机体调节到阀门弯道轴线轨迹上,将三维扫描仪机体与阀门内壁之间保持指定的距离。
41、具体的,所述伺服电机具体控制方法包括:
42、当靠近机壳顶部的压力传感器检测到的压力信息发生变化时,控制器基于请求信息控制伺服电机的输出轴进行顺时针转动;
43、以实现将三维扫描仪机体调节到阀门左端弯道轴线轨迹上,将三维扫描仪机体与阀门内壁之间保持指定的距离。
44、具体的,所述伺服电机具体控制方法还包括:
45、当靠近机壳底部的压力传感器检测到的压力信息发生变化时,控制器基于请求信息控制伺服电机的输出轴进行逆时针转动;
46、以实现将三维扫描仪机体调节到阀门右端弯道轴线轨迹上,将三维扫描仪机体与阀门内壁之间保持指定的距离。
47、与现有技术相比,本发明具有以下有益效果:
48、一、本发明通过设置机壳、四个测距杆和连接组件,使三维扫描仪机体与阀门内壁之间保持指定的距离,从而降低三维扫描仪机体与阀门内壁发生碰撞的机会,有利于降低了识别三维扫描仪机体识别阀门内部的难度。
49、二、本发明通过设置驱动环、弧形限位槽、卡块、复位弹簧和压力传感器,在三维扫描仪机体进入到弯道处时,通过测距杆发生偏转,通过对应位置上的压力传感器请求控制器控制机械手臂进行相适应调节,使三维扫描仪机体与阀门内壁之间保持指定的距离,从而降低三维扫描仪机体与阀门内壁发生碰撞的机会。
50、三、本发明通过设置滚轮,有利于降低机壳在阀门内移动过程中发生侧翻的可能,提高了机壳在阀门内移动时稳定性。
- 还没有人留言评论。精彩留言会获得点赞!