星敏感器与光学载荷之间测量基准的标定方法及装置与流程
本发明涉及卫星姿态测量,特别涉及一种星敏感器与光学载荷之间测量基准的标定方法及装置。
背景技术:
1、卫星包括载荷和平台,平台上安装有姿态测量敏感器(如星敏感器),未进行飞行任务前,载荷和星敏感器之间的位置转换关系是确定的。但是,光学遥感卫星在经历火箭发射时的力学振动以及受空间热影响引起的在轨形变、应力释放等过程的影响,光学载荷与星敏感器之间已经存在较大的相对误差,导致星敏感器测量得到的高精度姿态数据无法等精度的传递至载荷,导致对空间地理测绘等具有较高定姿精度要求的航天遥感任务难以完成。
2、因此,目前亟待需要一种星敏感器与光学载荷之间测量基准的标定方法及装置来解决上述技术问题。
技术实现思路
1、本发明实施例提供了一种星敏感器与光学载荷之间测量基准的标定方法及装置,可以消除光学载荷与星敏感器之间的测量偏差,保证光学载荷与星敏感器保持一致的测量基准。
2、第一方面,本发明实施例提供了一种星敏感器与光学载荷之间测量基准的标定方法,包括:
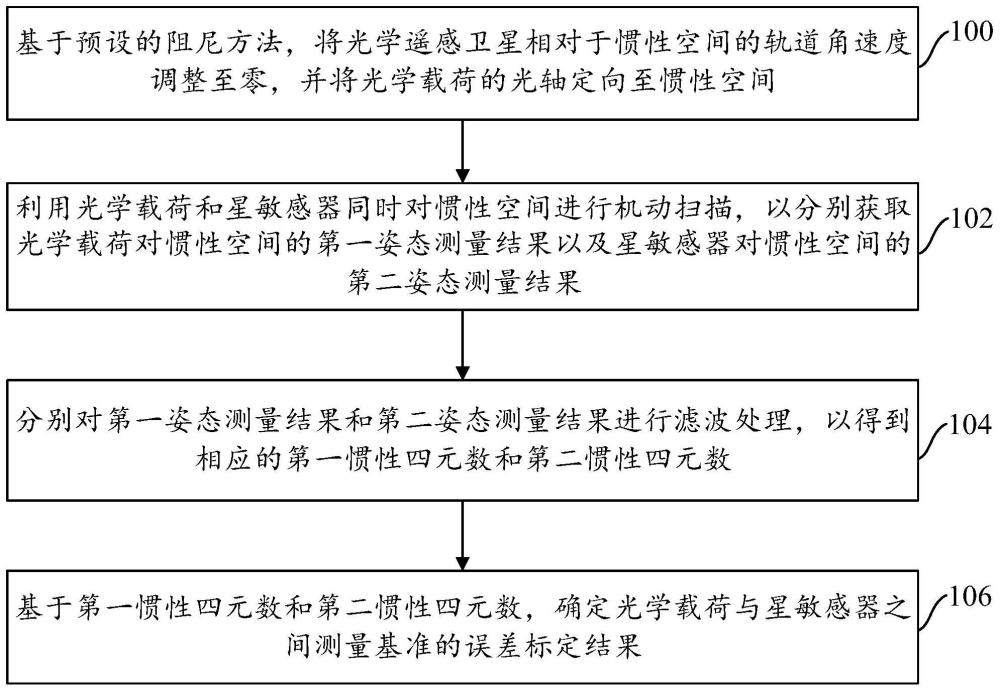
3、基于预设的阻尼方法,将光学遥感卫星相对于惯性空间的轨道角速度调整至零,并将光学载荷的光轴定向至惯性空间;
4、利用光学载荷和星敏感器同时对惯性空间进行机动扫描,以分别获取所述光学载荷对惯性空间的第一姿态测量结果以及所述星敏感器对惯性空间的第二姿态测量结果;
5、分别对所述第一姿态测量结果和所述第二姿态测量结果进行滤波处理,以得到相应的第一惯性四元数和第二惯性四元数;
6、基于所述第一惯性四元数和所述第二惯性四元数,确定所述光学载荷与所述星敏感器之间测量基准的误差标定结果。
7、第二方面,本发明实施例还提供了一种星敏感器与光学载荷之间测量基准的标定装置,包括:
8、阻尼模块,用于基于预设的阻尼方法,将光学遥感卫星相对于惯性空间的轨道角速度调整至零,并将光学载荷的光轴定向至惯性空间;
9、测量模块,用于利用光学载荷和星敏感器同时对惯性空间进行机动扫描,以分别获取所述光学载荷对惯性空间的第一姿态测量结果以及所述星敏感器对惯性空间的第二姿态测量结果;
10、滤波模块,用于分别对所述第一姿态测量结果和所述第二姿态测量结果进行滤波处理,以得到相应的第一惯性四元数和第二惯性四元数;
11、确定模块,用于基于所述第一惯性四元数和所述第二惯性四元数,确定所述光学载荷与所述星敏感器之间测量基准的误差标定结果。
12、第三方面,本发明实施例还提供了一种电子设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时,实现本说明书任一实施例所述的方法。
13、第四方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令计算机执行本说明书任一实施例所述的方法。
14、本发明实施例提供了一种星敏感器与光学载荷之间测量基准的标定方法及装置。首先进行光学载荷的定向转换,即从对地定向转为惯性定向。然后,对惯性空间进行机动扫描,并对光学载荷对惯性空间的姿态测量结果与星敏感器对惯性空间的姿态测量结果进行滤波,得到滤波后的惯性四元数。最后,基于得到的惯性四元数确定光学载荷与星敏感器测量基准之间的误差,以保证光学载荷与星敏感器保持一致的测量基准。
技术特征:
1.一种星敏感器与光学载荷之间测量基准的标定方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述基于预设的阻尼方法,将光学遥感卫星相对于惯性空间的轨道角速度调整至零,包括:
3.根据权利要求1所述的方法,其特征在于,所述基于所述第一惯性四元数和所述第二惯性四元数,确定所述光学载荷与所述星敏感器之间测量基准的误差标定结果,包括:
4.根据权利要求3所述的方法,其特征在于,所述基准误差矩阵是通过如下公式确定的:
5.根据权利要求4所述的方法,其特征在于,所述星敏感器相对所述光学载荷的初始误差角是通过如下公式确定的:
6.根据权利要求5所述的方法,其特征在于,对所述初始误差角进行过滤,得到过滤后的误差角是通过如下公式确定的:
7.一种星敏感器与光学载荷之间测量基准的标定装置,其特征在于,包括:
8.一种计算设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时,实现如权利要求1-6中任一项所述的方法。
9.一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令计算机执行权利要求1-6中任一项所述的方法。
技术总结
本发明涉及一种星敏感器与光学载荷之间测量基准的标定方法及装置。方法包括:基于预设的阻尼方法,将光学遥感卫星相对于惯性空间的轨道角速度调整至零,并将光学载荷的光轴定向至惯性空间;利用光学载荷和星敏感器同时对惯性空间进行机动扫描,以分别获取光学载荷对惯性空间的第一姿态测量结果以及星敏感器对惯性空间的第二姿态测量结果;分别对第一姿态测量结果和第二姿态测量结果进行滤波处理,以得到相应的第一惯性四元数和第二惯性四元数;基于第一惯性四元数和第二惯性四元数,确定光学载荷与星敏感器之间测量基准的误差标定结果。本申请,可以消除光学载荷与星敏感器之间的测量偏差,保证光学载荷与星敏感器保持一致的测量基准。
技术研发人员:雷拥军,陈超,陆栋宁,王晋鹏,景泉,王家炜,李晶心,何世民,乌日娜
受保护的技术使用者:北京控制工程研究所
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!