基于行为特征和坐标空间聚合的农业机械自动作业状态识别算法的制作方法
本发明涉及农业机械作业,尤其涉及基于行为特征和坐标空间聚合的农业机械自动作业状态识别算法。
背景技术:
1、导航定位是一种结合卫星及通信的技术,主要利用导航卫星进行测试和测距,随着通信技术的迅速发展,导航定位技术越来越广泛地应用于工程施工、勘探测绘、精确定时、运载工具及军事武器等方面,具有全天候、高精度、自动化和高效益等特点。
2、现有技术的一种导航定位采用全球卫星定位系统(global position systems;以下简称:gps),gps定位技术采用交互定位原理,通过已知几个点的距离,可求出未知点所处的位置。其中,已知点为空间卫星,未知点为地面某一移动目标。gps的定位和测量精度高,且不受地域时间限制。但当gps天线遇到遮蔽物时信号极有可能中断,比如应用于农用机械的导航定位,当农用机械在田间作业时,常会遇到树荫或者其他遮挡,极容易造成gps定位误差过大导致定位信息失效,从而影响导航定位的精度。
3、当前的农业机械作业监控系统通常依赖于机手进行的手动操作来标记作业的开始和结束,以记录机器的作业状态。这种依赖于人为操作的方式往往导致数据的丢失或不完整,尤其是在机手忘记进行标记或错误操作的情况下。这种数据丢失问题在实际农业操作中是常见的,严重影响了作业数据的完整性和可靠性,进而影响了农业管理和决策的准确性。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的基于行为特征和坐标空间聚合的农业机械自动作业状态识别算法。
2、为了实现上述目的,本发明采用了如下技术方案:
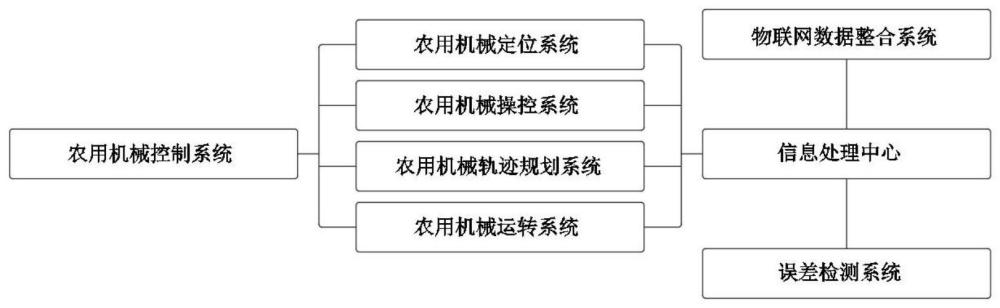
3、基于行为特征和坐标空间聚合的农业机械自动作业状态识别算法,包括农用机械控制系统与信息处理中心,所述农用机械控制系统内设有农用机械定位系统、农用机械操控系统、农用机械轨迹规划系统以及农用机械运转系统,所述信息处理中心包括误差检测系统以及物联网数据整合系统,所述农用机械定位系统包括卫星坐标定位系统、农用机械设备定位设备以及农用机械导航系统。
4、优选地,所述农用机械操控系统包括农业机械自动操控系统与农用机械手动操控系统,所述农业机械自动操控系统与农用机械手动操控系统配合农用机械运转系统完成对农用机械的自动与手动动力分配过程。
5、优选地,所述农业机械自动操控系统与农用机械手动操控系统分别包括动力系统、制动系统以及手动操纵杆。
6、优选地,所述农用机械轨迹规划系统包括操控面板、自导航引导以及轨迹规划系统,所述操控面板包括速度控制面板、油量水温控制面板以及运行方向面板,所述运行方向面板配合农用机械操控系统控制农用机械的运转方向与轨迹路径方向。
7、优选地,所述轨迹规划系统包括卫星坐标规划系统以及地形扫描规划系统,所述卫星坐标规划系统以及地形扫描规划系统均包括轨迹规划与轨迹判别,其中轨迹判别通过信息处理控制系统对地形扫描以及卫星坐标形成的轨迹轨迹进行信息误差计算,后通过所述物联网数据整合系统对扫描以及坐标计算后的路径进行整合,形成最终的农用机械轨迹规划。
8、优选地,所述卫星坐标定位系统在进行定位以及路径规划的过程,通过信息误差检测系统进行误差计算,其包括性变形速率计算,将线性变形速率对应的相位将其从干涉图中去除,通过上述运算,可以获取以大气相位、非线性形变相位及相位噪声为主要成分的残余相位,上述三种相位成分在sar影像的时域和空域表现出不同程度的相关性,可通过融合时域和空间滤波的方法来分离不同的相位成分;
9、在时域滤波时,需要先对残余相位进行标定,传统的标定方法为,将干涉图的残余相位减去参考点处的残余相位,本发明推荐计算多个参考点所在像元残余相位的平均值,并将去从干涉图残余相位中减去:
10、
11、考虑到残余相位值是缠绕的,需要对相位的复数进行运算,以满足相位的连续性。
12、本发明与现有技术相比,其有益效果为:
13、1、与现有技术相比,本发明解决了农用机械多采用手动驾驶以及人工记录作业状态的方式使用,导致农用机械在运转过程中容易出现信息误差不完整以及信息遗忘的问题,本发明设置了农用机械控制系统、信息处理中心以及物联网数据整合系统,可通过信息处理中心以及物联网整合的方式将农用机械在运转过程中的速度、水温、油量以及运行方向等进行实时记录更新,进而避免农用机械在运转过程中的运行信息不完整的问题。
14、2、与现有技术相比,本发明还解决了农用机械在使用过程中路径规划的问题,通过卫星坐标规划系统以及车辆的地形扫描规划系统,可实现车辆在运转过程中,通过车辆地形识别以及卫星坐标信息整合的方式规划车辆在运转过程中的路径,保持车辆路径在运转过程中稳定已经精准性。
15、3、本发明设置了信息误差检测系统,通过对卫星坐标定位系统识别到的外部环境误差影响因素的识别,可实现对卫星坐标采集数据的修正以及误差计算,结合车辆地形扫描规划的方式,保证农用车量在的自动驾驶状态下保证路径的精准性与安全性。
16、4、本发明显著提高了数据采集的完整性和准确性,实现了对农业机械作业状态的全自动监控和分析,通过排除机手操作因素,提供了更可靠的作业数据,从而优化了农业管理和作业监控系统,此外,准确识别的作业面积和地块形状信息对于精准农业管理尤为重要。
技术特征:
1.基于行为特征和坐标空间聚合的农业机械自动作业状态识别算法,其特征在于,包括农用机械控制系统与信息处理中心,所述农用机械控制系统内设有农用机械定位系统、农用机械操控系统、农用机械轨迹规划系统以及农用机械运转系统,所述信息处理中心包括误差检测系统以及物联网数据整合系统,所述农用机械定位系统包括卫星坐标定位系统、农用机械设备定位设备以及农用机械导航系统。
2.根据权利要求1所述的基于行为特征和坐标空间聚合的农业机械自动作业状态识别算法,其特征在于,所述农用机械操控系统包括农业机械自动操控系统与农用机械手动操控系统,所述农业机械自动操控系统与农用机械手动操控系统配合农用机械运转系统完成对农用机械的自动与手动动力分配过程。
3.根据权利要求1所述的基于行为特征和坐标空间聚合的农业机械自动作业状态识别算法,其特征在于,所述农业机械自动操控系统与农用机械手动操控系统分别包括动力系统、制动系统以及手动操纵杆。
4.根据权利要求1所述的基于行为特征和坐标空间聚合的农业机械自动作业状态识别算法,其特征在于,所述农用机械轨迹规划系统包括操控面板、自导航引导以及轨迹规划系统,所述操控面板包括速度控制面板、油量水温控制面板以及运行方向面板,所述运行方向面板配合农用机械操控系统控制农用机械的运转方向与轨迹路径方向。
5.根据权利要求1所述的基于行为特征和坐标空间聚合的农业机械自动作业状态识别算法,其特征在于,所述轨迹规划系统包括卫星坐标规划系统以及地形扫描规划系统,所述卫星坐标规划系统以及地形扫描规划系统均包括轨迹规划与轨迹判别,其中轨迹判别通过信息处理控制系统对地形扫描以及卫星坐标形成的轨迹轨迹进行信息误差计算,后通过所述物联网数据整合系统对扫描以及坐标计算后的路径进行整合,形成最终的农用机械轨迹规划。
6.根据权利要求1所述的基于行为特征和坐标空间聚合的农业机械自动作业状态识别算法,其特征在于,所述卫星坐标定位系统在进行定位以及路径规划的过程,通过信息误差检测系统进行误差计算,其包括性变形速率计算,将线性变形速率对应的相位将其从干涉图中去除,通过上述运算,可以获取以大气相位、非线性形变相位及相位噪声为主要成分的残余相位,上述三种相位成分在sar影像的时域和空域表现出不同程度的相关性,可通过融合时域和空间滤波的方法来分离不同的相位成分;
技术总结
本发明公开了基于行为特征和坐标空间聚合的农业机械自动作业状态识别算法,包括农用机械控制系统与信息处理中心,所述农用机械控制系统内设有农用机械定位系统、农用机械操控系统、农用机械轨迹规划系统以及农用机械运转系统。本发明设置了农用机械控制系统、信息处理中心以及物联网数据整合系统,可通过信息处理中心以及物联网整合的方式将农用机械在运转过程中的速度、水温、油量以及运行方向等进行实时记录更新,进而避免农用机械在运转过程中的运行信息不完整的问题,通过车辆地形识别以及卫星坐标信息整合的方式规划车辆在运转过程中的路径,保持车辆路径在运转过程中稳定已经精准性。
技术研发人员:李娜,韩飞,曲宏伟,刘晓宇,杨泽明,辛健
受保护的技术使用者:联农创世(北京)农业科技有限公司
技术研发日:
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!