一种三维表面形貌测量方法及系统
本发明涉及三维表面形貌测量,尤其涉及一种三维表面形貌测量方法及系统。
背景技术:
1、为高精度地重建复杂表面形貌,结构光照明显微镜是一种适用的方法。该方法实现非点扫描、非相干照明、无针孔的微观表面形貌测量。该技术应用三维宽视场和高分辨层析成像方法及装置,在数字微镜器件上分别加载结构图案和平面图案,通过光源照射数字微镜器件依次产生结构光并中继到样品上,采集物镜成像的结构光照明图像进行分析,得到光学层析图像,进一步经各点层析曲线峰值提取,得到表面形貌重建。
2、但由于其对表面形貌的重建依赖层析图像的计算,使得在垂直扫描过程中常常需要通过在同一轴向位置投影多幅相移结构光照明图像,从而造成系统测量效率低;另外,现有技术中测量样品精度极大依赖于峰值定位算法,常用的高斯拟合算法虽有精度高的特点,但计算量大,影响系统效率,并且测量精度也不高。
3、因此,亟需一种具有较高的测量效率和测量精度的三维表面形貌测量的技术方案。
技术实现思路
1、本发明提供一种三维表面形貌测量方法及系统,用以解决现有技术中三维表面形貌测量方法的效率和精度都较低的缺陷,实现了三维表面形貌的高精度和高效率测量。
2、第一方面,本发明提供一种三维表面形貌测量方法,包括:
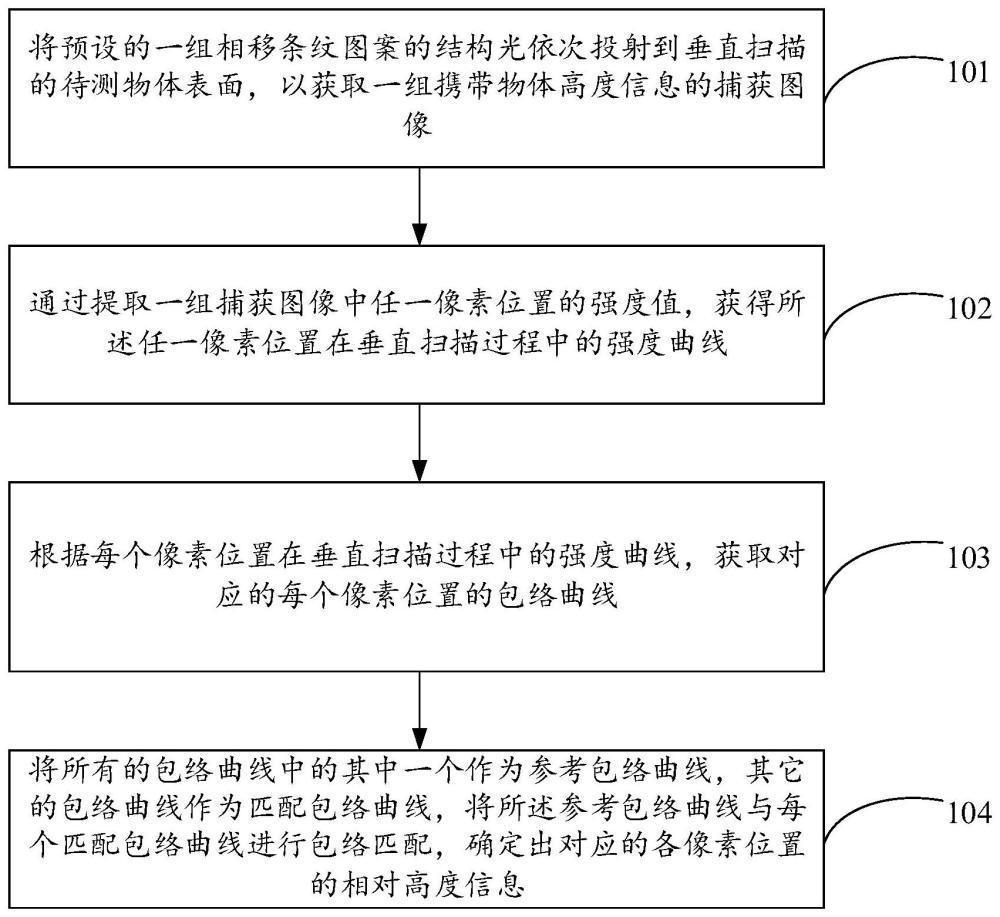
3、将预设的一组相移条纹图案的结构光依次投射到垂直扫描的待测物体表面,以获取一组携带物体高度信息的捕获图像;其中,在垂直扫描过程中,物体的垂直扫描与相移条纹图案的切换同步,并且在每个垂直扫描位置对应一个相移条纹图案;
4、通过提取一组捕获图像中任一像素位置的强度值,获得所述任一像素位置在垂直扫描过程中的强度曲线;
5、根据每个像素位置在垂直扫描过程中的强度曲线,获取对应的每个像素位置的包络曲线;
6、将所有的包络曲线中的其中一个作为参考包络曲线,其它的包络曲线作为匹配包络曲线,将所述参考包络曲线与每个匹配包络曲线进行包络匹配,确定出对应的各像素位置的相对高度信息。
7、本发明提供一种三维表面形貌测量方法,根据任一像素位置在垂直扫描过程中的强度曲线,每个任一像素位置的包络曲线,包括:利用希尔伯特变换法或者傅里叶变换法,求取强度曲线的包络曲线。
8、本发明提供一种三维表面形貌测量方法,所述相移条纹图案为四步相移的正弦条纹,每个相邻相移条纹图案之间具有相移。
9、本发明提供一种三维表面形貌测量方法,根据所述参考包络曲线与任一匹配包络曲线的匹配度,确定出所述任一匹配包络曲线对应的像素位置的相对高度信息,包括:从参考包络曲线上选取一段包含n个离散数据的参考序列;其中,将参考序列中的第一个点在垂直扫描过程中的位置序号为fa,每个采样点对应的包络强度值为iai;
10、通过求取相关系数ix,得到参考序列与匹配序列的匹配度;其中,匹配序列为匹配包络曲线中某一段与参考序列长度相同的序列,匹配序列中每个采样点的包络强度值为ibi;
11、求取相关系数的具体公式为:
12、
13、其中,和分别是参考序列及匹配序列中所有点的强度均值;
14、将参考序列从所述任一匹配包络曲线的起始位置开始,通过滑动匹配的方式依次提取匹配序列,并计算所述任一匹配包络曲线每个匹配序列对应的相关系数;
15、将最大值的相关系数对应的匹配序列作为最优匹配序列;
16、计算任一匹配包络曲线对应的像素位置的相对高度信息;具体为:
17、h=(fa-fb)*depth;
18、其中,fb为最优匹配序列的第一个点在垂直扫描过程中对应的序号,depth为垂直扫描步距。
19、本发明提供一种三维表面形貌测量方法,在利用图像采集设备进行垂直扫描的情况下,条纹宽度采用与图像采集设备的像素大小的差值小于预设阈值。
20、本发明提供一种三维表面形貌测量方法,所述强度曲线的函数表示像素位置的强度值随垂直扫描位置z的变化函数;
21、
22、其中,i(z)表示像素位置的强度值,i0(z)是背景光强,c0(z)是在垂直扫描位置z的对比度,是在像素位置(x,y)处的常量。
23、第二方面,本发明还提供一种三维表面形貌测量系统,包括:
24、图像捕获模块,用于将预设的一组相移条纹图案的结构光依次投射到垂直扫描的待测物体表面,以获取一组携带物体高度信息的捕获图像;其中,在垂直扫描过程中,物体的垂直扫描与相移条纹图案的切换同步,并且在每个垂直扫描位置对应一个相移条纹图案;
25、强度曲线确定模块,用于通过提取一组捕获图像中任一像素位置的强度值,获得所述任一像素位置在垂直扫描过程中的强度曲线;
26、包络曲线确定模块,用于根据每个像素位置在垂直扫描过程中的强度曲线,获取对应的每个像素位置的包络曲线;
27、高度信息确定模块,用于将所有的包络曲线中的其中一个作为参考包络曲线,其它的包络曲线作为匹配包络曲线,将所述参考包络曲线与每个匹配包络曲线进行包络匹配,确定出对应的各像素位置的相对高度信息。
28、第三方面,本发明提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述三维表面形貌测量方法的步骤。
29、第四方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述三维表面形貌测量方法的步骤。
30、第五方面,本发明还提供一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如上述任一种所述三维表面形貌测量方法的步骤。
31、本发明提供的三维表面形貌测量方法及系统,相对于传统的结构照明显微镜在轴向扫描的过程中,减少了结构照明图像投影采集的次数,省略了求取层析图像的步骤,提高了信息利用率以及系统的测量效率。
32、本发明提供一种基于包络相关匹配的峰值定位算法,在提高测量效率的同时保留了结构照明测量高分辨率的特性,包络匹配具有高速、高精度的特点,适用于三维表面形貌测量。
技术特征:
1.一种三维表面形貌测量方法,其特征在于,包括:
2.根据权利要求1所述的三维表面形貌测量方法,其特征在于,根据任一像素位置在垂直扫描过程中的强度曲线,每个任一像素位置的包络曲线,包括:
3.根据权利要求1所述的三维表面形貌测量方法,其特征在于,所述相移条纹图案为四步相移的正弦条纹,每个相邻相移条纹图案之间具有相移。
4.根据权利要求1所述的三维表面形貌测量方法,其特征在于,根据所述参考包络曲线与任一匹配包络曲线的匹配度,确定出所述任一匹配包络曲线对应的像素位置的相对高度信息,包括:
5.根据权利要求3所述的三维表面形貌测量方法,其特征在于,在利用图像采集设备进行垂直扫描的情况下,条纹宽度采用与图像采集设备的像素大小的差值小于预设阈值。
6.根据权利要求1所述的三维表面形貌测量方法,其特征在于,所述强度曲线的函数表示像素位置的强度值随垂直扫描位置z的变化函数;
7.一种三维表面形貌测量系统,其特征在于,包括:
8.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至6任一项所述三维表面形貌测量方法的步骤。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述三维表面形貌测量方法的步骤。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述三维表面形貌测量方法的步骤。
技术总结
本发明提供一种三维表面形貌测量方法及系统,所述方法包括:将预设的一组相移条纹图案的结构光依次投射到垂直扫描的待测物体表面,以获取一组携带物体高度信息的捕获图像;通过提取一组捕获图像中任一像素位置的强度值,获得所述任一像素位置在垂直扫描过程中的强度曲线;根据每个像素位置在垂直扫描过程中的强度曲线,获取对应的每个像素位置的包络曲线;将所有的包络曲线中的其中一个作为参考包络曲线,其它的包络曲线作为匹配包络曲线,将所述参考包络曲线与每个匹配包络曲线进行包络匹配,确定出对应的各像素位置的相对高度信息。本发明提供的三维表面形貌测量方法及系统,相较于现有技术具有测量效率高、测量精度高的优势。
技术研发人员:刘晓军,叶卓杭,柴常春,曲通
受保护的技术使用者:华中科技大学
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!