多传感器融合感知障碍物的方法、系统、介质及机器人与流程
本发明涉及融合感知,尤其涉及一种多传感器融合感知障碍物的方法、系统、存储介质及机器人。
背景技术:
1、使用具有消毒功能的机器人进行消毒时,需要实时感知环境,要判断出机器人近距离范围内是否有障碍物、是已有的障碍物还是新出现的障碍物,如果是新出现的障碍物还要判断是静态还是动态障碍物,这些状态的准确识别,为机器人正确的移动和任务执行决策提供重要的依据。
技术实现思路
1、有鉴于此,本发明实施例的目的是提供一种多传感器融合感知障碍物的方法、系统、存储介质及机器人,通过采用多传感器融合感知的方式,能够准确识别各类障碍物。
2、一方面,本发明实施例提供了一种多传感器融合感知障碍物的方法,所述方法包括以下步骤:
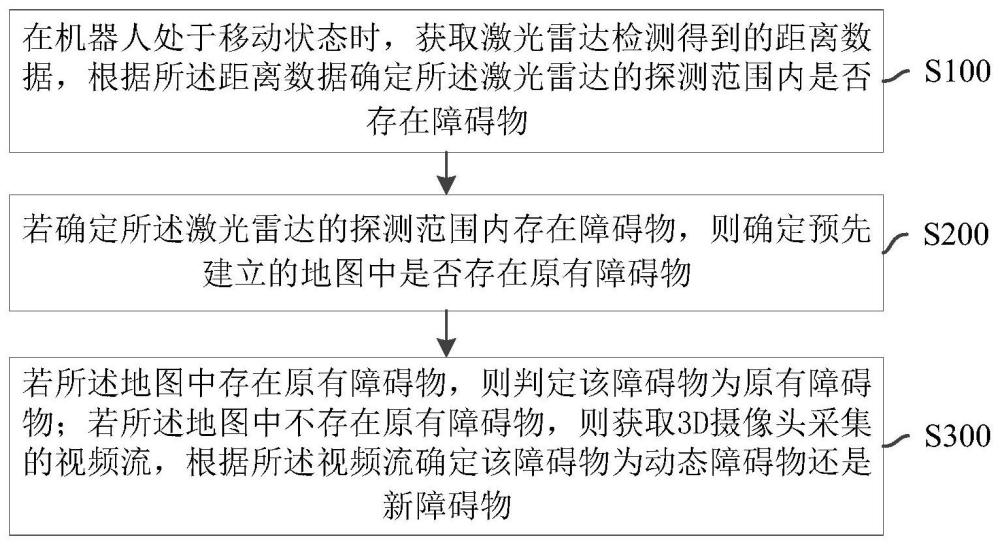
3、在机器人处于移动状态时,获取激光雷达检测得到的距离数据,根据所述距离数据确定所述激光雷达的探测范围内是否存在障碍物;
4、若确定所述激光雷达的探测范围内存在障碍物,则确定预先建立的地图中是否存在原有障碍物;其中,所述地图通过对机器人的工作区域进行扫描建立;
5、若所述地图中存在原有障碍物,则判定该障碍物为原有障碍物;若所述地图中不存在原有障碍物,则获取3d摄像头采集的视频流,根据所述视频流确定该障碍物为动态障碍物还是新障碍物。
6、可选地,所述方法还包括:
7、在机器人处于静止状态时,获取人体感应模块输出的感应信号,根据所述感应信号确定所述人体感应模块的探测范围内是否存在动态障碍物。
8、可选地,所述获取人体感应模块输出的感应信号,根据所述感应信号确定所述人体感应模块的探测范围内是否存在动态障碍物,包括:
9、若检测到人体感应模块输出感应信号,则确定所述人体感应模块的探测范围在当前时间存在动态障碍物;
10、在当前时间之后的延时时间段内,持续检测人体感应模块是否输出感应信号;
11、若人体感应模块再次输出感应信号,则将人体感应模块再次输出感应信号的时间作为当前时间,并返回执行在当前时间之后的延时时间段内,持续检测人体感应模块是否输出感应信号这一步骤;
12、若人体感应模块在当前时间之后的延时时间段内没有输出感应信号,则确定所述人体感应模块的探测范围无障碍物。
13、可选地,所述方法还包括:
14、若人体感应模块在当前时间之后的延时时间段内没有输出感应信号,则控制人体感应模块在延时时间段之后的封锁时间段内停止输出感应信号。
15、可选地,所述获取激光雷达检测得到的距离数据,根据所述距离数据确定所述激光雷达的探测范围内是否存在障碍物,包括:
16、机器人每间隔一设定时间间隔读取一次激光雷达输出的距离数据;
17、将多个连续读取的距离数据求平均值,如果求得的平均值小于距离阈值,则确定激光雷达探测范围内存在障碍物。
18、可选地,所述获取3d摄像头采集的视频流,根据所述视频流确定该障碍物为动态障碍物还是新障碍物,包括:
19、从3d摄像头采集的视频流中获取rgb视频流;
20、从所述rgb视频流中抓取视频帧图片,将所述视频帧图片输入预先训练好的人形检测模型进行检测;
21、若检测结果是人形,则判定检测到动态障碍物,否则判定检测到新障碍物。
22、另一方面,本发明实施例提供了一种机器人多传感器融合感知障碍物的系统,所述系统包括:
23、第一模块,用于在机器人处于移动状态时,获取激光雷达检测得到的距离数据,根据所述距离数据确定所述激光雷达的探测范围内是否存在障碍物;
24、第二模块,用于若确定所述激光雷达的探测范围内存在障碍物,则确定预先建立的地图中是否存在原有障碍物;其中,所述地图通过对机器人的工作区域进行扫描建立;
25、第三模块,用于若所述地图中存在原有障碍物,则判定该障碍物为原有障碍物;若所述地图中不存在原有障碍物,则获取3d摄像头采集的视频流,根据所述视频流确定该障碍物为动态障碍物还是新障碍物。
26、另一方面,本发明实施例提供了一种机器人,所述机器人设置有雾化槽,所述雾化槽内设置有雾化器;所述机器人包括:
27、至少一个处理器;
28、至少一个存储器,用于存储至少一个程序;
29、当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现上述的方法。
30、可选地,所述机器人的顶部环绕设置有4个人体感应模块环绕,每个所述人体感应模块的覆盖角度均为90°。
31、另一方面,本发明实施例提供了一种计算机可读存储介质,其中存储有处理器可执行的程序,所述处理器可执行的程序在由处理器执行时用于执行上述的方法。
32、本发明实施例包括以下有益效果:在机器人处于移动状态时,获取激光雷达检测得到的距离数据,根据所述距离数据确定所述激光雷达的探测范围内是否存在障碍物。若确定所述激光雷达的探测范围内存在障碍物,则确定预先建立的地图中是否存在原有障碍物。若所述地图中存在原有障碍物,则判定该障碍物为原有障碍物;若所述地图中不存在原有障碍物,则获取3d摄像头采集的视频流,根据所述视频流确定该障碍物为动态障碍物还是新障碍物。本发明通过采用多传感器融合感知的方式,能够准确识别各类障碍物,从而能够准确识别各类障碍物,为机器人正确的移动和任务执行决策提供重要的依据。
技术特征:
1.一种多传感器融合感知障碍物的方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述方法还包括:
3.根据权利要求2所述的方法,其特征在于,所述获取人体感应模块输出的感应信号,根据所述感应信号确定所述人体感应模块的探测范围内是否存在动态障碍物,包括:
4.根据权利要求3所述的方法,其特征在于,所述方法还包括:
5.根据权利要求1所述的方法,其特征在于,所述获取激光雷达检测得到的距离数据,根据所述距离数据确定所述激光雷达的探测范围内是否存在障碍物,包括:
6.根据权利要求1所述的方法,其特征在于,所述获取3d摄像头采集的视频流,根据所述视频流确定该障碍物为动态障碍物还是新障碍物,包括:
7.一种机器人多传感器融合感知障碍物的系统,其特征在于,所述系统包括:
8.一种机器人,其特征在于,所述机器人包括:
9.根据权利要求8所述的机器人,其特征在于,所述机器人的顶部环绕设置有4个人体感应模块环绕,每个所述人体感应模块的覆盖角度均为90°。
10.一种计算机可读存储介质,其中存储有处理器可执行的程序,其特征在于,所述处理器可执行的程序在由处理器执行时用于执行如权利要求1至6任一项所述的方法。
技术总结
本发明涉及融合感知技术领域,具体为一种多传感器融合感知障碍物的方法、系统、存储介质及机器人,方法包括:在机器人处于移动状态时,获取激光雷达检测得到的距离数据,根据所述距离数据确定所述激光雷达的探测范围内是否存在障碍物;若确定所述激光雷达的探测范围内存在障碍物,则确定预先建立的地图中是否存在原有障碍物;若所述地图中存在原有障碍物,则判定该障碍物为原有障碍物;若所述地图中不存在原有障碍物,则获取3D摄像头采集的视频流,根据所述视频流确定该障碍物为动态障碍物还是新障碍物;本发明能够准确识别各类障碍物。
技术研发人员:陈堪宜,庄雁淳,苏似霖
受保护的技术使用者:广东天波信息技术股份有限公司
技术研发日:
技术公布日:2024/6/18
- 还没有人留言评论。精彩留言会获得点赞!