一种植株监测方法和系统与流程
本说明书涉及智能监测领域,特别涉及一种植株监测方法和系统。
背景技术:
1、水稻育种或生产过程中,需要长期监控水稻的高度,以便定期获得植株的生长情况,判断是否存在生长异常问题。在传统的作业方式中,需要人工定期用量尺测量稻田中的植株高度。工作人员劳动强度大,且操作复杂繁琐。
2、针对自动测量植株高度的问题,cn113554691b提出一种植株高度测量方法,该申请重点针对的是用相机拍摄图像和深度数据,获得三维点云,根据三维点云计算植株高度。cn105675549b提出一种便携式农作物参数测量与长势智能分析装置及方法,该申请重点针对的是通过获取多光谱图像,通过摄影测量技术,空间插值技术实现农作物冠层结构的三维重建。但是多种植株分布,以及自然环境因素也会对测量精度产生影响,以致影响判断植株生长情况的准确性,保证测量精度对于判断植株生长情况具有重要意义。而这些申请并没有考虑多种植株分布、自然环境因素对测量精度带来的影响,仍存在精度波动大、成本较高的问题,分析结果仍需较多人力进行核查。
3、因此,希望提供一种植株监测方法和系统,能够获得更准确的植株高度监测结果。
技术实现思路
1、本说明书一个或多个实施例提供一种植株监测系统,所述植株监测系统包括监测装置和智能终端;所述监测装置包括:调节臂、影像获取装置、动力驱动装置和通讯部件;所述影像获取装置位于所述调节臂上和自动灌溉装置上;所述调节臂包括多自由度的关节,被配置为调整所述影像获取装置的位置;所述通讯部件与所述智能终端通信;所述智能终端包括处理器,所述智能终端被配置为:基于监测区域确定第一监测点位,并控制所述监测装置移动到所述第一监测点位,所述第一监测点位为所述监测区域内植株所在位置;基于所述调节臂调整所述影像获取装置,获取第一监测图像;响应于所述第一监测图像中存在监测目标,且所述监测目标位于目标区域,控制所述监测装置停止移动;获取所述影像获取装置的监测高度,基于所述监测高度,确定修正植株高度;响应于所述第一监测点位的所述修正植株高度满足预设预警条件,发出预警。
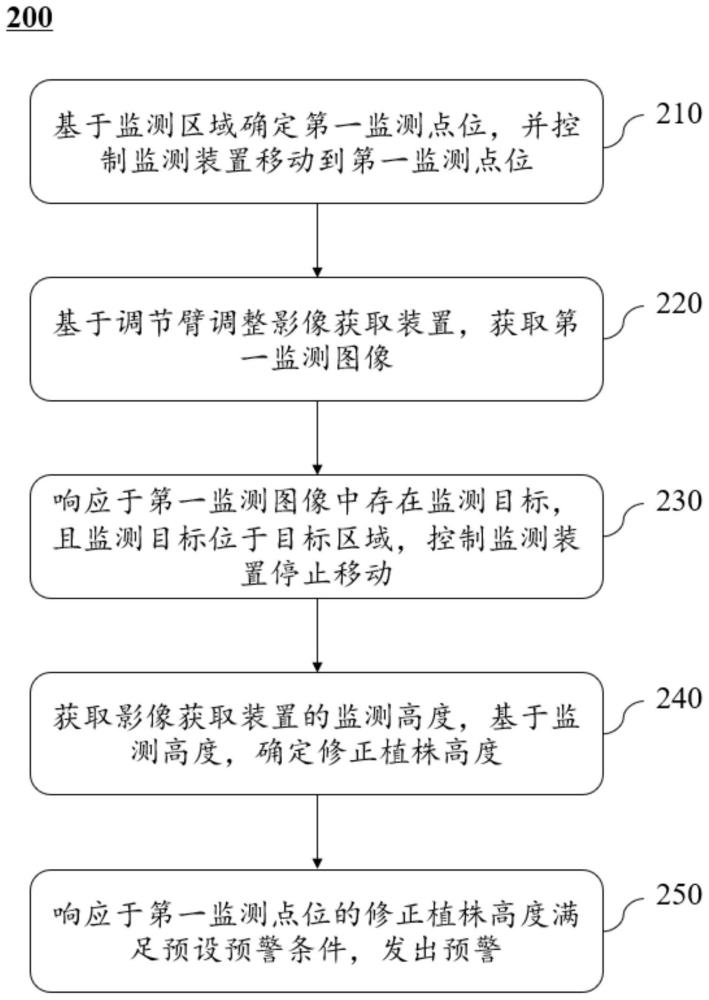
2、本说明书一个或多个实施例提供一种植株监测方法,所述方法基于植株监测系统实现,所述植株监测系统包括监测装置和智能终端;所述监测装置包括:调节臂、影像获取装置、动力驱动装置和通讯部件;所述影像获取装置位于所述调节臂上和自动灌溉装置上;所述调节臂包括多自由度的关节,被配置为调整所述影像获取装置的位置;所述通讯部件与所述智能终端通信;所述智能终端包括处理器,所述方法包括:基于监测区域确定第一监测点位,并控制所述监测装置移动到所述第一监测点位,所述第一监测点位为所述监测区域内植株所在位置;基于所述调节臂调整所述影像获取装置,获取第一监测图像;响应于所述第一监测图像中存在监测目标,且所述监测目标位于目标区域,控制所述监测装置停止移动;获取所述影像获取装置的监测高度,基于所述监测高度,确定修正植株高度;响应于所述第一监测点位的所述修正植株高度满足预设预警条件,发出预警。
技术特征:
1.一种植株监测系统,其特征在于,所述植株监测系统包括监测装置和智能终端;
2.根据权利要求1所述的系统,其特征在于,所述影像获取装置还包括倾角传感器,所述倾角传感器被配置为获取所述监测装置的倾角数据;所述智能终端进一步被配置为:
3.根据权利要求2所述的系统,其特征在于,所述风力风向数据还包括历史时段的风力风向序列;所述智能终端进一步被配置为:
4.根据权利要求1所述的系统,其特征在于,所述智能终端进一步被配置为:基于所述修正植株高度,确定所述监测区域的区域植株高度。
5.根据权利要求4所述的系统,其特征在于,所述智能终端进一步被配置为:
6.一种植株监测方法,所述方法基于植株监测系统实现,其特征在于,所述植株监测系统包括监测装置和智能终端;
7.根据权利要求6所述的方法,其特征在于,所述影像获取装置还包括倾角传感器,所述倾角传感器被配置为获取所述监测装置的倾角数据;所述基于所述检测高度,确定所述修正植株高度包括:
8.根据权利要求7所述的方法,其特征在于,所述风力风向数据还包括历史时段的风力风向序列;所述基于风力风向数据、所述监测高度和和所述倾角数据,确定所述修正植株高度包括:
9.根据权利要求6所述的方法,其特征在于,所述基于所述检测高度,确定所述修正植株高度包括:基于所述修正植株高度,确定所述监测区域的区域植株高度。
10.根据权利要求9所述的方法,其特征在于,所述基于所述修正植株高度,确定所述监测区域的区域植株高度包括:
技术总结
本说明书实施例提供一种植株监测方法和系统。该方法基于植株监测系统实现。该方法包括:基于监测区域确定第一监测点位,并控制监测装置移动到第一监测点位,第一监测点位为监测区域内植株所在位置;基于调节臂调整影像获取装置,获取第一监测图像;响应于第一监测图像中存在监测目标,且监测目标位于目标区域,控制监测装置停止移动;获取影像获取装置的监测高度,基于监测高度,确定修正植株高度;响应于第一监测点位的修正植株高度满足预设预警条件,发出预警。
技术研发人员:江平
受保护的技术使用者:北京熵辰科技有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!