地图匹配初值的确定方法及装置、电子设备及存储介质与流程
本发明涉及智能驾驶,尤其涉及一种地图匹配初值的确定方法及装置、电子设备及存储介质。
背景技术:
1、随着人工智能技术的发展,汽车智能驾驶技术也成为研究的热点。在汽车智能驾驶技术中,地图匹配模块将实际观测数据与地图数据进行匹配的算法,用于确定观测数据在地图上的位置,在实际使用中通常将感知车道线借助惯性导航系统(inertialnavigation system, ins)的定位观测数据投影到全局地图坐标系,然后再进行感知车道线和高精地图车道线的几何匹配算法,最后将几何特征建立为代价函数输入优化算法计算得到当前自车的全局位姿。目前现有的地图匹配算法中,地图匹配初值的确定存在以下不足:
2、1、感知车道线投影初值是基于ins的定位结果来确定,但是由于ins自身误差和加偏误差的影响,可能会发生地图匹配算法无法匹配上的结果,这是由于ins定位在某些场景定位结果太差,导致投影后感知车道线和高精地图车道线误差过大。
3、2、感知车道线投影初值仅基于ins的定位结果,初值的确定所参考的因素的比较单一,尤其当ins出现问题或者故障时,地图匹配模块也无法正常运转,系统的鲁棒性较差。
4、3、无法确定自车所在主车道左右地图车道线,因此可能会发生错车道匹配的情况,导致最后错误的错车道定位结果。
技术实现思路
1、本发明的目的旨在至少在一定程度上解决上述的技术问题之一。
2、为此,本发明的第一个目的在于提出一种方法,该方法基于多个不同定位算法而得到多个备选位姿,进而实现地图匹配初值的自适应选择,增强了地图匹配算法整体初值选择的鲁棒性,进而提高定位的精准度。
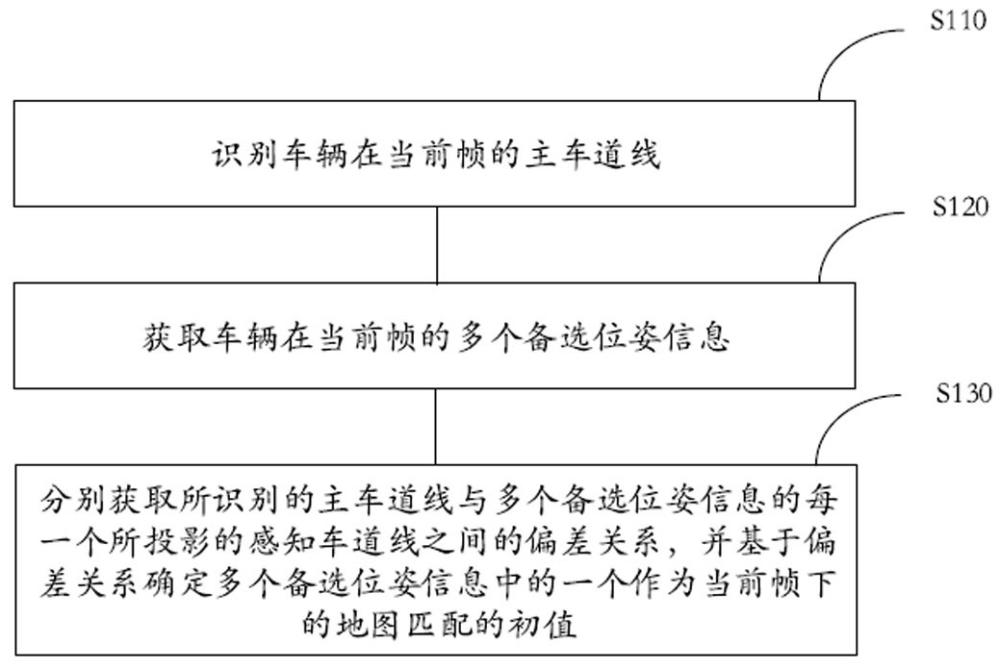
3、为达到上述目的,本发明第一方面实施例提出一种地图匹配初值的确定方法,所述确定方法包括:识别车辆在当前帧的主车道线;获取所述车辆在所述当前帧下的多个备选位姿信息,其中所述多个备选位姿信息中的每一个基于至少一种定位算法而得到;分别获取所识别的主车道线与所述多个备选位姿信息的每一个所投影的感知车道线之间的偏差关系,并基于所述偏差关系确定所述多个备选位姿信息中的一个作为在所述当前帧下的地图匹配的初值。
4、根据本发明的一个实施例,所述多个备选位姿信息包括第一备选位姿信息,且所述获取所述车辆在所述当前帧下的多个备选位姿信息包括:获取基于组合导航算法在当前帧输出的位姿信息,以将所述组合导航算法在当前帧输出的位姿信息作为所述第一备选位姿信息。
5、根据本发明的一个实施例,所述多个备选位姿信息包括第二备选位姿信息,且所述获取所述车辆在所述当前帧的多个备选位姿信息,包括:获取地图匹配算法在所述上一帧输出的位姿信息;获取组合导航算法在所述上一帧和所述当前帧输出的位姿信息;根据所述组合导航算法在所述上一帧和所述当前帧输出的位姿信息,得到所述组合导航算法在所述上一帧和所述当前帧之间输出的位姿差;根据所述地图匹配算法在所述上一帧输出的位姿信息和所述组合导航算法在所述上一帧和所述当前帧之间输出的位姿差,计算得到所述当前帧下的第二备选位姿信息。
6、根据本发明的一个实施例,所述多个备选位姿信息包括第三备选位姿信息,且所述获取所述车辆在所述当前帧的多个备选位姿信息,还包括:获取融合定位算法在所述上一帧输出的位姿信息;获取组合导航算法在所述上一帧和所述当前帧输出的位姿信息;根据所述组合导航算法在所述上一帧和所述当前帧输出的位姿信息,得到所述组合导航算法在所述上一帧和所述当前帧之间的位姿差;根据所述融合定位算法在所述上一帧输出的位姿信息和所述组合导航算法在所述上一帧和所述当前帧之间的位姿差,计算得到所述当前帧下的第三备选位姿信息。
7、根据本发明的一个实施例,所述获取所识别的主车道线与所述多个备选位姿信息的每一个所投影的感知车道线之间的偏差关系,包括:分别获取所识别的主车道线与所述多个备选位姿信息中的每一个所投影的感知车道线对应的匹配点;基于预设的代价函数,确定获取对应匹配点之间的偏差结果,并分别得到所述主车道线与所述多个备选位姿信息中的每一个所投影的感知车道线之间的偏差和。
8、根据本发明的一个实施例,所述基于所述偏差关系,确定所述多个备选位姿信息中的一个作为在所述当前帧下的地图匹配初值,包括:比较所述多个备选位姿信息所投影的感知车道线与所述主车道线之间的多个偏差和的大小关系;将对应所述偏差和最小的备选位姿信息作为所述车辆在当前帧下的地图匹配初值。
9、根据本发明的一个实施例,所述识别车辆在当前帧的主车道线,包括:获取所述车辆的换道状态信息,其中所述换道状态包括未换道、换道中和已换道;基于所述车辆的换道状态信息,在地图中识别获取所述车辆在当前帧的对应的主车道线。
10、为达到上述目的,本发明第二方面实施例提出一种地图匹配初值的确定装置,所述确定装置包括:识别单元,用于识别车辆在当前帧的主车道线;获取单元,用于获取所述车辆在所述当前帧的多个备选位姿信息,获取所述车辆在所述当前帧下的多个备选位姿信息,其中所述多个备选位姿信息中的每一个基于至少一种定位算法而得到;确定单元,用于分别获取所识别的主车道线与所述多个备选位姿信息的每一个所投影的感知车道线之间的偏差关系,并基于所述偏差关系确定所述多个备选位姿信息中的一个作为所述当前帧下的地图匹配的初值。
11、为达到上述目的,本发明第三方面实施例提出一种电子设备,所述电子设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实现本发明第一方面实施例所述的方法。
12、为达到上述目的,本发明第四方面实施例提出的计算机可读存储介质,所述计算机程序被处理器执行时实现本发明第一方面实施例所述的。
13、本发明实施例提出的地图匹配初值的确定方法具有如下优势:
14、1)提供多种备选位姿初值,进行自适应选择,减小投影后感知车道线与高精地图车道线误差,避免地图匹配算法错车道匹配和错车道定位结果,从而提高定位的精准度;
15、2)增强了地图匹配算法整体初值选择的鲁棒性,进而使得地图匹配算法的鲁棒性更强,尤其遇到传感器突发异常或者其他特殊场景能够具有稳定的定位处理能力;
16、3)耗时较少,不占用cpu负载,提高高精融合定位的实时性和稳定性。
17、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种地图匹配初值的确定方法,其特征在于,所述确定方法包括:
2.根据权利要求1所述的确定方法,其特征在于,所述多个备选位姿信息包括第一备选位姿信息,且所述获取所述车辆在所述当前帧下的多个备选位姿信息包括:
3.根据权利要求1所述的确定方法,其特征在于,所述多个备选位姿信息包括第二备选位姿信息,且所述获取所述车辆在所述当前帧的多个备选位姿信息,包括:
4.根据权利要求1所述的确定方法,其特征在于,所述多个备选位姿信息包括第三备选位姿信息,且所述获取所述车辆在所述当前帧的多个备选位姿信息,还包括:
5.根据权利要求1所述的确定方法,其特征在于,所述获取所识别的主车道线与所述多个备选位姿信息的每一个所投影的感知车道线之间的偏差关系,包括:
6.根据权利要求5所述的确定方法,其特征在于,所述基于所述偏差关系,确定所述多个备选位姿信息中的一个作为在所述当前帧下的地图匹配初值,包括:
7.根据权利要求1所述的确定方法,其特征在于,所述识别车辆在当前帧的主车道线,包括:
8.一种地图匹配初值的确定装置,其特征在于,所述确定装置包括:
9.一种电子设备,包括:
10.一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行根据权利要求1-7中任一项所述的地图匹配初值的确定方法。
技术总结
本发明公开了一种地图匹配初值的确定方法及装置、电子设备及存储介质。所述确定方法包括:识别车辆在当前帧的主车道线;获取所述车辆在所述当前帧的多个备选位姿信息,其中所述多个备选位姿信息中的每一个基于至少一种定位算法而得到;分别获取所识别的主车道线与所述多个备选位姿信息的每一个所投影的感知车道线之间的偏差关系,并基于所述偏差关系确定所述多个备选位姿信息中的一个作为所述车辆在当前帧下的地图匹配的初值。本发明公开的地图匹配初值的确定方法能够提供多种备选位姿初值,进行自适应选择,减小投影后感知车道线与高精地图车道线误差,避免地图匹配算法错车道匹配和错车道定位结果。
技术研发人员:请求不公布姓名,请求不公布姓名
受保护的技术使用者:合众新能源汽车股份有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!