一种RTK基准站位置确定方法、系统及存储介质与流程
本申请涉及基准站定位,尤其涉及一种rtk基准站位置确定方法、系统及存储介质。
背景技术:
1、在进行rtk测量时,通常都是借助基准站的观测信息和确定的坐标来对流动站的位置进行校正,但若将基站架设在未知点上时,便无法实现对流动站的精确定位,所以在标定流动站位置时会先确定基准站的精准位置。
2、现有的方法通常需要借助流动站到已知的控制点上进行单点校正,也就是利用流动站的差分改正值来推算基准站的精准坐标,但这种方式比较依赖于已知控制点的搜寻,一旦无法获取到已知控制点时,便难以确定基准站的精准位置。
技术实现思路
1、本申请的目的是提供一种rtk基准站位置确定方法、系统及存储介质,当基准站架设在未知点时,在未能获取流动站的已知控制点的情况下,依然可以实现对基准站进行精准定位。
2、第一方面,本申请提供一种rtk基准站位置确定方法,采用如下的技术方案:
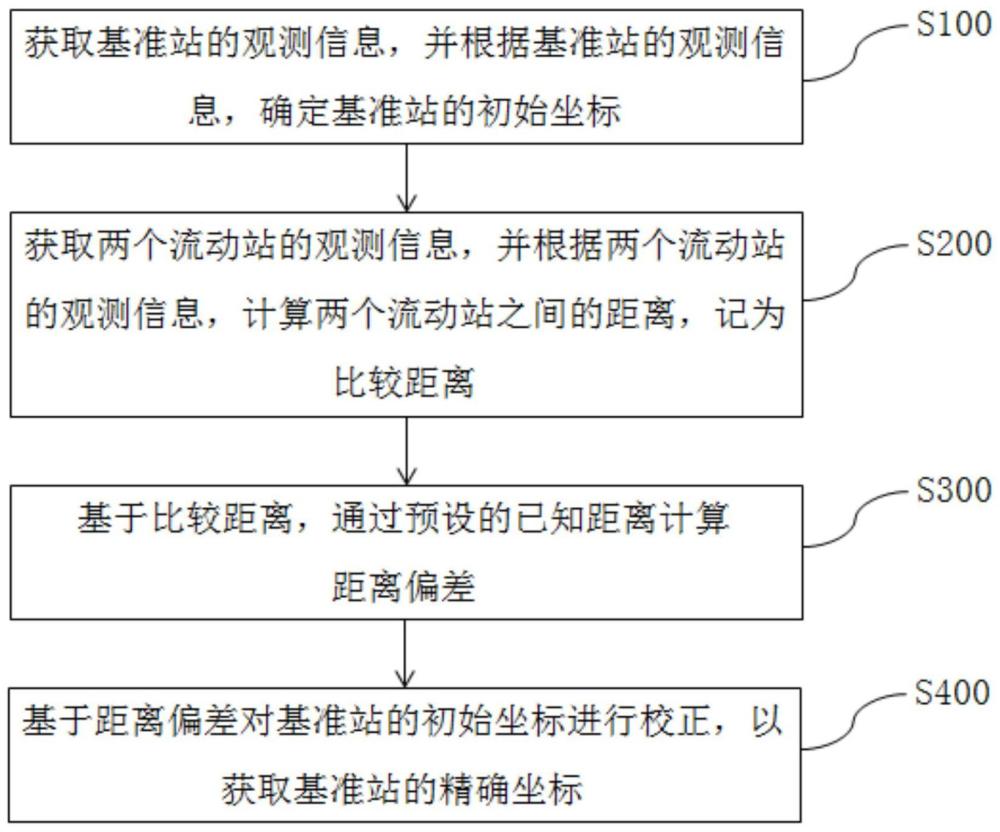
3、获取基准站的观测信息,并根据基准站的观测信息,确定基准站的初始坐标;
4、获取两个流动站的观测信息,并根据两个流动站的观测信息,计算两个流动站之间的距离,记为比较距离;
5、基于比较距离,通过预设的已知距离计算距离偏差;
6、基于距离偏差对基准站的初始坐标进行校正,以获取基准站的精确坐标。
7、通过上述技术方案,通过对两个已知距离的流动站进行观测,以两个流动站的距离偏差作为基准站的误差校正,在未知流动站具体位置的情况下依然可以对基准站进行精细化的定位。
8、可选的,获取基准站的观测信息,并根据基准站的观测信息,确定基准站的初始坐标,包括:
9、按照预设的时间间隔连续两次获取基准站的观测信息,并分别获取对应的坐标,分别记为第一坐标和第二坐标;
10、根据第一坐标和第二坐标,获取坐标偏差;
11、判断坐标偏差是否大于预设第一阈值;
12、若否,则记第二坐标为初始坐标;
13、若是,则输出第一提示信息,用以表示基准站位置发生变更。
14、可选的,根据两个流动站的观测信息,计算两个流动站之间的距离,记为比较距离,包括:
15、记两个流动站分别为第一流动站和第二流动站;
16、根据两个流动站的观测信息,分别获取第一流动站的坐标和第二流动站的坐标;
17、根据第一流动站的坐标和第二流动站的坐标,计算两个流动站之间的距离,并记为比较距离。
18、可选的,基于距离偏差对基准站的初始坐标进行校正,以获取基准站的精确坐标,包括:
19、基于距离偏差,生成单个流动站的位置偏移量;
20、根据单个流动站的位置偏移量,对基准站的初始坐标进行校正,以获取基准站的精确坐标。
21、可选的,基于距离偏差对基准站的初始坐标进行校正,以获取基准站的精确坐标之后,还包括:
22、对基准站的精准坐标进行进一步核对。
23、可选的,对基准站的精准坐标进行进一步核对,包括:
24、再次获取两个流动站的观测信息,并根据两个流动站的观测信息,获取两个流动站的初始坐标;
25、基于两个流动站的初始坐标,通过基准站的精确坐标,获取两个流动站的精准坐标;
26、根据两个流动站的精确坐标,获取两个流动站的精确距离,并通过预设的已知距离,计算距离误差;
27、判断距离误差是否小于预设第二阈值;
28、若否,则输出第二提示信息,用以表示基准站的精准坐标核对异常。
29、可选的,输出第二提示信息的同时,包括:
30、根据两个流动站的初始坐标和精确坐标,分别计算两个流动站的单点误差;
31、判断两个流动站的单点误差是否相同;
32、若不相同,则将两个流动站的距离误差和单点误差一同存入预设的数据库。
33、可选的,将两个流动站的距离误差和单点误差一同存入预设的数据库之后,包括:
34、基于数据库中存入的所有数据,通过大数据建模,获取两个流动站的距离误差与单点误差之间的关联模型。
35、第二方面,本申请提供一种rtk基准站位置确定系统,包括:
36、初始坐标获取模块101,用于获取基准站的观测信息,并根据基准站的观测信息,确定基准站的初始坐标;
37、比较距离计算模块102,用于获取两个流动站的观测信息,并根据两个流动站的观测信息,计算两个流动站之间的距离,记为比较距离;
38、距离偏差计算模块103,用于基于比较距离,通过预设的已知距离计算距离偏差;
39、精准坐标获取模块104,用于基于距离偏差对基准站的初始坐标进行校正,以获取基准站的精确坐标。
40、第三方面,本申请提供一种计算机可读存储介质,存储有能够被处理器加载并执行上述一种rtk基准站位置确定方法的计算机程序。
41、综上所述,本申请首先通过对两个已知距离的流动站进行观测,以距离偏差作为导向,在未知流动站具体位置的情况下依然可以对基准站进行精细化的定位,有助于提升测绘工作的灵活性;另外,对基准站位置校正的结果会进行核对,可进一步增加基准站精准位置的可信度;此外,还会对距离偏差作为引导的校正方式进行数据分析建模,可有助于对该校正方式进行综合评测和优化调整,从而提升该校正方式的鲁棒性。
技术特征:
1.一种rtk基准站位置确定方法,其特征在于,包括:
2.根据权利要求1所述的一种rtk基准站位置确定方法,其特征在于,获取基准站的观测信息,并根据基准站的观测信息,确定基准站的初始坐标,包括:
3.根据权利要求1所述的一种rtk基准站位置确定方法,其特征在于,根据两个流动站的观测信息,计算两个流动站之间的距离,记为比较距离,包括:
4.根据权利要求1所述的一种rtk基准站位置确定方法,其特征在于,基于距离偏差对基准站的初始坐标进行校正,以获取基准站的精确坐标,包括:
5.根据权利要求1所述的一种rtk基准站位置确定方法,其特征在于,基于距离偏差对基准站的初始坐标进行校正,以获取基准站的精确坐标之后,还包括:
6.根据权利要求5所述的一种rtk基准站位置确定方法,其特征在于,对基准站的精准坐标进行进一步核对,包括:
7.根据权利要求6所述的一种rtk基准站位置确定方法,其特征在于,输出第二提示信息的同时,包括:
8.根据权利要求7所述的一种rtk基准站位置确定方法,其特征在于,将两个流动站的距离误差和单点误差一同存入预设的数据库之后,包括:
9.一种rtk基准站位置确定系统,其特征在于,包括:
10.一种计算机可读存储介质,存储有能够被处理器加载并执行如权利要求1至8任一项所述的一种rtk基准站位置确定方法的计算机程序。
技术总结
本申请涉及基准站定位技术领域,具体公开了一种RTK基准站位置确定方法、系统及存储介质,所述方法包括:获取基准站的观测信息,并根据基准站的观测信息,确定基准站的初始坐标;获取两个流动站的观测信息,并根据两个流动站的观测信息,计算两个流动站之间的距离,记为比较距离;基于比较距离,通过预设的已知距离计算距离偏差;基于距离偏差对基准站的初始坐标进行校正,以获取基准站的精确坐标。本申请通过对两个已知距离的流动站进行观测,以距离偏差作为导向,在未知流动站具体位置的情况下依然可以对基准站进行精细化的定位。
技术研发人员:张海鹏,张文彬,张春磊,陈乐敏,纪敏
受保护的技术使用者:杭州市土地勘测设计规划院有限公司
技术研发日:
技术公布日:2024/5/27
- 还没有人留言评论。精彩留言会获得点赞!