一种基于预置粒子群算法的相控阵气象雷达波束等化方法与流程
本发明涉及天线与微波技术,特别是一种基于预置粒子群算法的相控阵气象雷达波束等化方法。
背景技术:
1、在气象雷达领域,雷达体制已逐渐从传统机扫雷达向相控阵雷达过度,相控阵雷达可增加气象探测的范围,增强信号抗干扰能力,灵活波束指向;还可无惯性地快速扫描,可将全空域扫描时间控制在一分钟之内,对快速变化的天气过程,如龙卷、冰雹、风切变等具有极佳的监测能力。这使得相控阵体制的雷达在气象领域广受青睐。
2、然而,根据气象雷达方程:
3、
4、式中:pr为接收回波功率;pt为峰值功率;g为天线增益;λ为雷达波长;h为脉冲长度;r为雷达与探测目标的距离;θ为水平波束宽度;φ为垂直波束宽度;|k|2为介电常数项;z为气象目标的雷达反射率因子。
5、可见,气象探测对雷达波束的波束宽度敏感,在扫描过程中,需保持雷达波束的绝对稳定,减少修正过程和探测误差。而相控阵雷达其波束宽度、波束增益均会随着扫描角度的改变而改变,这对于其在气象探测领域的应用造成了一定的限制。
6、申请号为201711226971.8的专利申请了一种波束等化的小口径圆锥喇叭,该设计在e面方向压缩辐射段的口径,使用微扰激励起tm11模,实现了e面和h面的波束等化。然而,这种设计仅完成单个天线e面和h面的波束等化,对于相控阵气象雷达的应用场景需求还具有相当的差距。
7、在相控阵领域,还未有对扫描过程中的波束等化问题给出较好的解决办法,以保证在扫描过程中,雷达的波束宽度、增益均保持一致。
技术实现思路
1、针对现有技术中存在的问题,本发明提供了一种解决相控阵雷达在扫描过程中的波束等化问题,使其在扫描过程中做到波束等化,通过预置粒子群算法优化扫描过程中的雷达波束形状,生成个扫描角度下的最优幅相分布,使得在各扫描角度下,相控阵雷达波束等化,即雷达的波束宽度、增益均保持一致。该技术可解决相控阵雷达波束随扫描角度变宽,增益随扫描角度变低问题,满足气象雷达应用需求,提高相控阵雷达在气象探测领域的优势的基于预置粒子群算法的相控阵气象雷达波束等化方法。
2、本发明的目的通过以下技术方案实现。
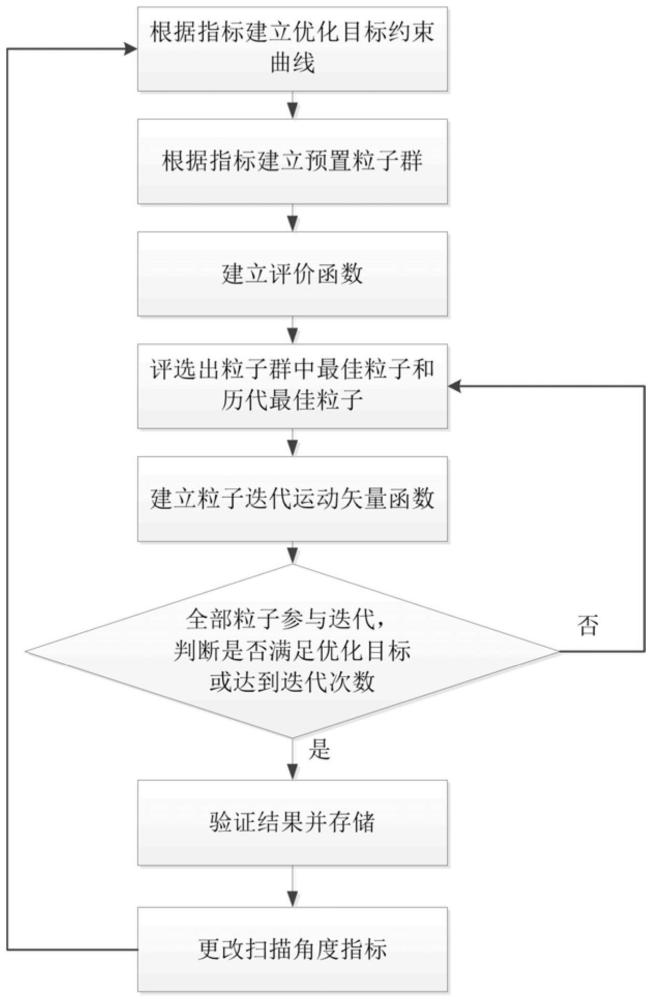
3、一种基于预置粒子群算法的相控阵气象雷达波束等化方法,包括以下步骤:
4、步骤一:根据指标要求建立等化波束优化目标上下限约束曲线;
5、步骤二:根据指标要求设计泰勒加权和扫描相位加权的幅相结果,并根据幅相结果生成初始粒子群其中…是具有泰勒加权的各通道幅度分布,是具有θ指向的扫描相位加权,sn是第n个粒子,n是粒子群体数量;即预置粒子群,其对应未等化的辐射波束,较接近优化目标;
6、步骤三:根据阵面特征建立评价函数f=lg(∑max(l-p,0)+∑max(p-h,0)),其中h和l分别为优化目标上下限曲线,p为粒子对应计算得到的阵面辐射波束结果曲线;
7、步骤四:通过阵面各通道幅相计算阵面辐射波束p,并根据辐射波束与优化目标的匹配程度对粒子群体进行评分,选出群体中最佳粒子将预置粒子群置为历代最佳粒子
8、步骤五:将全部粒子群参与迭代,迭代运动矢量v包括历代最佳运动矢量群体最佳运动矢量和惯性运动矢量vr三部分,不断使用评价函数对新生成的粒子群体进行评分,并不断择选出群体最佳粒子和历代最佳粒子;
9、步骤六:重复迭代运动过程,直至达到指定的迭代次数或群体最佳粒子完全满足优化目标曲线;
10、步骤七:验证群体最佳粒子即最优通道幅相所对应的辐射波束结果是否满足波束等化要求并存储对应扫描角度的最优通道幅相;
11、步骤八:更改扫描角度指标,重复以上步骤。
12、所述步骤一中优化目标上限曲线规定了波束的上限轮廓,优化目标下限曲线规定了波束的下限轮廓,波束宽度也由优化目标上下限曲线规定;优化目标上下限约束曲线约束波束宽度,还约束副瓣,使优化目标在保证波束宽度不变的情况下达到高副瓣抑制。
13、所述步骤二中每个预置粒子都是指标要求的泰勒加权幅度分布和扫描相位加权的相位分布的集合;粒子群体数量n由算法需要的精度和速度来设置。
14、所述步骤三中上下限曲线h和l以及辐射波束p的计算点数相同,并且与空域角度一一映射。
15、所述步骤五中的迭代运动,其特征在于:vr=k3v-;其中k1,k2,k3是迭代因子,r(i)是服从区间为(0,1)的均匀分布随机值,v-是上一次迭代时的运动矢量,所述迭代因子k1,k2,k3的值为常数且根据需要的迭代运动速度而改变。
16、步骤六中的直至达到指定的迭代次数或群体最佳粒子完全满足优化目标曲线,优化结果并不唯一,该步骤可多次进行,取得多个不同的优化结果。
17、所述步骤七中验证群体最佳粒子即最优通道幅相所生成的辐射波束结果是否满足波束等化要求,需使迭代结果满足雷达各通道幅相量化要求,应用于实际雷达阵面,通过电磁仿真软件验证各通道幅相量化后波束结果。
18、所述步骤八中更改扫描角度指标:扫描角度设置需满足所有扫描空域,其更改规则为θi=iθp;i∈(0,…,θm/θp-1),其中θi是波束指向,θp是波束宽度,θm是指标要求最大波束指向。
19、相比于现有技术,本发明的优点在于:1、本技术采用预置粒子群方法,在迭代之前即给出较优解,大大提高了算法优化速度。
20、2、本技术对各个扫描角度建立等化波束优化目标上下限曲线,保障了阵面在扫描过程中,波束宽度、增益保持不变,满足了气象雷达应用需求。
21、3、在扫描过程中,本技术还加入了高副瓣抑制优化目标,在保证阵面扫描过程中波束宽度、增益保持不变的前提下,还维持高副瓣抑制。
技术特征:
1.一种基于预置粒子群算法的相控阵气象雷达波束等化方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于预置粒子群算法的相控阵气象雷达波束等化方法,其特征在于所述步骤一中优化目标上限曲线规定了波束的上限轮廓,优化目标下限曲线规定了波束的下限轮廓,波束宽度也由优化目标上下限曲线规定;优化目标上下限约束曲线约束波束宽度,还约束副瓣,使优化目标在保证波束宽度不变的情况下达到高副瓣抑制。
3.根据权利要求1所述的一种基于预置粒子群算法的相控阵气象雷达波束等化方法,其特征在于所述步骤二中每个预置粒子都是指标要求的泰勒加权幅度分布和扫描相位加权的相位分布的集合;粒子群体数量n由算法需要的精度和速度来设置。
4.根据权利要求1所述的一种基于预置粒子群算法的相控阵气象雷达波束等化方法,其特征在于所述步骤三中上下限曲线h和l以及辐射波束p的计算点数相同,并且与空域角度一一映射。
5.根据权利要求1所述的一种基于预置粒子群算法的相控阵气象雷达波束等化方法,其特征在于所述步骤五中的迭代运动,其特征在于:vr=k3v-;其中k1,k2,k3是迭代因子,r(i)是服从区间为(0,1)的均匀分布随机值,v-是上一次迭代时的运动矢量,所述迭代因子k1,k2,k3的值为常数且根据需要的迭代运动速度而改变。
6.根据权利要求1所述的一种基于预置粒子群算法的相控阵气象雷达波束等化方法,其特征在于步骤六中的直至达到指定的迭代次数或群体最佳粒子完全满足优化目标曲线,优化结果并不唯一,该步骤可多次进行,取得多个不同的优化结果。
7.根据权利要求1所述的一种基于预置粒子群算法的相控阵气象雷达波束等化方法,其特征在于所述步骤七中验证群体最佳粒子即最优通道幅相所生成的辐射波束结果是否满足波束等化要求,需使迭代结果满足雷达各通道幅相量化要求,应用于实际雷达阵面,通过电磁仿真软件验证各通道幅相量化后波束结果。
8.根据权利要求1所述的一种基于预置粒子群算法的相控阵气象雷达波束等化方法,其特征在于所述步骤八中更改扫描角度指标:扫描角度设置需满足所有扫描空域,其更改规则为θi=iθp;i∈(0,…,θm/θp-1),其中θi是波束指向,θp是波束宽度,θm是指标要求最大波束指向。
技术总结
本发明公开了一种基于预置粒子群算法的相控阵气象雷达波束等化方法,根据指标要求建立等化波束优化目标上下限约束曲线;根据指标要求设计泰勒加权和扫描相位加权的幅相结果,并根据幅相结果生成初始粒子群;根据阵面特征建立评价函数;通过阵面各通道幅相计算阵面辐射波束,并根据辐射波束与优化目标的匹配程度对粒子群体进行评分,选出群体中最佳粒子,将预置粒子群置为历代最佳粒子;将全部粒子群参与迭代,不断使用评价函数对新生成的粒子群体进行评分,并不断择选出群体最佳粒子和历代最佳粒子;重复迭代运动过程,直至达到指定的迭代次数或群体最佳粒子完全满足优化目标曲线。
技术研发人员:杨磊,张乔,孙磊,王真,于大群,官林海,刘新安
受保护的技术使用者:中国电子科技集团公司第十四研究所
技术研发日:
技术公布日:2024/5/27
- 还没有人留言评论。精彩留言会获得点赞!