激光测距系统、方法、装置及电子设备与流程
本公开属于激光测距,更具体地说,是涉及一种激光测距系统、方法、装置及电子设备。
背景技术:
1、目前,市面上的激光位移传感器都是基于单一的三角测量法的设计原理。
2、但是,由于单一的激光三角测量法的设计原理本身具有局限性,导致光学测距类传感器无法同时满足测量范围广、测量盲区小、体积小、测量精度高的特性。如果要保证更广的测量范围,更小的盲区和更小的体积则需要牺牲测量精度,为了满足不同场景的使用需求,往往需要研发多款产品来适配。
技术实现思路
1、本公开实施例的目的在于提供一种激光测距系统、方法、装置及电子设备,旨在解决现有技术中的单一的激光三角测量法的设计原理具有局限性,导致光学测距类传感器无法同时满足测量范围广、测量盲区小、体积小、测量精度高的特性的技术问题。
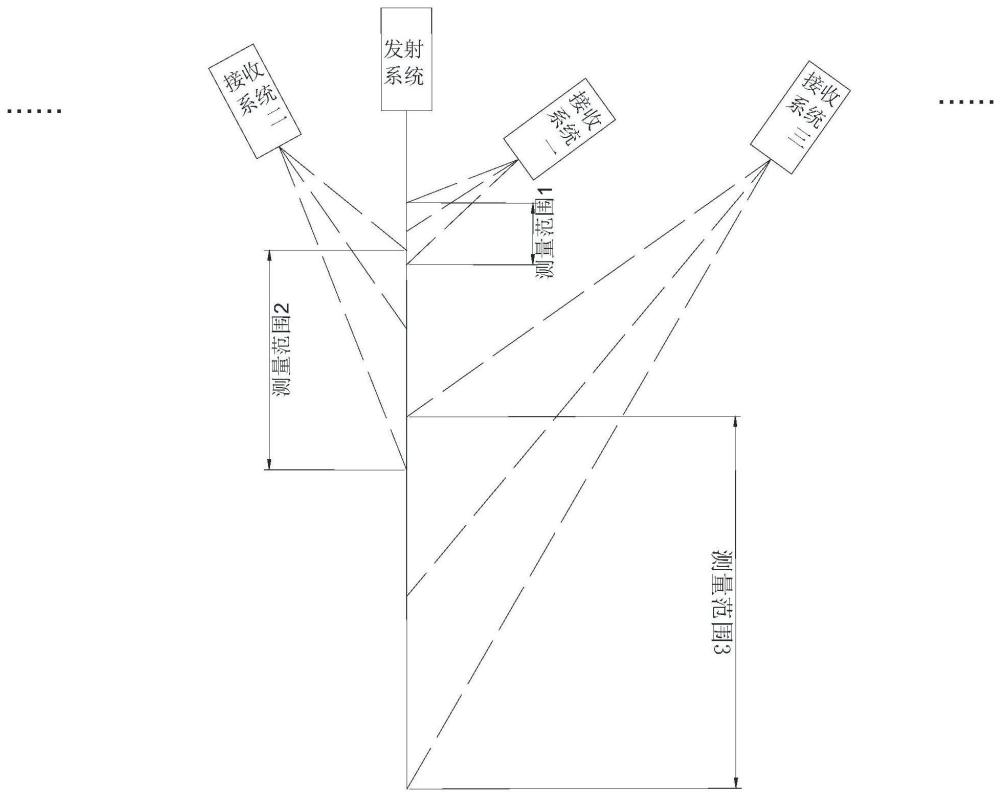
2、为实现上述目的,根据本公开的第一个方面,提供了一种激光测距系统,该激光测距系统包括:
3、一个发射系统,用于向被测物的表面发射激光光束;
4、至少两个接收系统,用于分别在各自对应的测量范围内检测所述被测物的表面在接收所述激光光束后返回的反射光束,并根据所述反射光束在每个所述接收系统各自的光电探测器上的成像位移,确定所述被测物与基准线之间的距离值,其中,相邻的两个所述接收系统的测量范围相衔接或部分重合。
5、可选地,若相邻的第一接收系统和第二接收系统的测量范围部分重合,则确定所述第一接收系统检测到的所述被测物与所述基准线之间的第一距离值、所述第二接收系统检测到的所述被测物与所述基准线之间的第二距离值、所述第一接收系统落入重合测量范围的第一边缘检测距离值、所述第二接收系统落入重合测量范围的第二边缘检测距离值;并根据所述第一距离值、所述第二距离值、所述第一边缘检测距离值、所述第二边缘检测距离值,确定所述重合测量范围对应的距离值。
6、可选地,所述发射系统包括至少如下组件:
7、半导体激光器,用于发射所述激光光束;
8、准直透镜,用于对透过的所述激光光束进行准直处理;
9、发射光阑,用于控制光束大小,还用于减弱或隔离不必要光线;
10、其中,所述激光光束在所述被测物的表面形成的光斑的聚焦位置和光斑大小是基于所述半导体激光器和所述准直透镜之间的距离确定的。
11、可选地,每个所述接收系统包括至少如下组件:光学成像透镜、接收光阑、光电探测器;
12、其中,每个所述接收系统中的光学成像透镜均采用非球面设计。
13、可选地,每个所述接收系统对应的最差测量精度,与如下至少之一因素相关:所述激光测距系统对像素点的识别能力、所述激光测距系统的传感头体积、所述激光测距系统的测量距离。
14、可选地,所述接收系统与所述发射系统之间的相对位置符合激光三角法测距原理。
15、根据本公开的第二个方面,提供了一种激光测距方法,应用于激光测距系统中,所述激光测距系统包括:一个发射系统和至少两个接收系统,所述激光测距方法包括:
16、控制一个所述发射系统向被测物的表面发射激光光束;
17、控制至少两个所述接收系统,分别在各自对应的测量范围内检测所述被测物的表面在接收所述激光光束后返回的反射光束;
18、根据所述反射光束在每个所述接收系统各自的光电探测器上的成像位移,确定所述被测物与基准线之间的距离值,其中,相邻的两个所述接收系统的测量范围相衔接或部分重合。
19、可选地,所述激光测距方法还包括:
20、若相邻的第一接收系统和第二接收系统的测量范围部分重合,则确定所述第一接收系统检测到的所述被测物与所述基准线之间的第一距离值、所述第二接收系统检测到的所述被测物与所述基准线之间的第二距离值、所述第一接收系统落入重合测量范围的第一边缘检测距离值、所述第二接收系统落入重合测量范围的第二边缘检测距离值;
21、根据所述第一距离值、所述第二距离值、所述第一边缘检测距离值、所述第二边缘检测距离值,确定所述重合测量范围对应的距离值。
22、第二个方面以及第二个方面的任意一种实现方式分别与第一个方面以及第一个方面的任意一种实现方式相对应。第二个方面以及第二个方面的任意一种实现方式所对应的技术效果可参见上述第一个方面以及第一个方面的任意一种实现方式所对应的技术效果,此处不再赘述。
23、根据本公开的第三个方面,提供了一种激光测距装置,所述激光测距装置包括:
24、发射单元,用于控制一个所述发射系统向被测物的表面发射激光光束;
25、接收单元,用于控制至少两个所述接收系统,分别在各自对应的测量范围内检测所述被测物的表面在接收所述激光光束后返回的反射光束;
26、确定单元,用于根据所述反射光束在每个所述接收系统各自的光电探测器上的成像位移,确定所述被测物与基准线之间的距离值,其中,相邻的两个所述接收系统的测量范围相衔接或部分重合。
27、根据本公开的第四个方面,提供了一种电子设备,包括一个或多个处理器和存储器;
28、所述存储器与一个或多个处理器耦合,所述存储器用于存储计算机程序代码,所述计算机程序代码包括计算机指令,所述一个或多个处理器调用所述计算机指令以使得所述电子设备执行如任一项所述的方法。
29、根据本公开的第五个方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,当所述计算机程序在电子设备上运行时,使得所述电子设备执行如任一项所述的方法。
30、根据本公开的第六个方面,提供了一种计算机程序产品,所述计算机程序产品包括:计算机程序代码,当所述计算机程序代码被电子设备运行时,使得该电子设备执行如任一项所述的方法。
31、本公开提供的激光测距系统、方法、装置及电子设备,有益效果在于:与现有技术相比,采用一个发射系统,用于向被测物的表面发射激光光束;采用至少两个接收系统,用于分别在各自对应的测量范围内检测被测物的表面在接收激光光束后返回的反射光束,由于相邻的两个接收系统的测量范围相衔接或部分重合,可以根据反射光束在每个接收系统各自的光电探测器上的成像位移,确定被测物与基准线之间的距离值。可以解决现有技术中的单一的激光三角测量法的设计原理具有局限性,导致光学测距类传感器无法同时满足测量范围广、测量盲区小、体积小、测量精度高的特性的技术问题。
技术特征:
1.一种激光测距系统,其特征在于,所述激光测距系统包括:
2.根据权利要求1所述的激光测距系统,其特征在于,若相邻的第一接收系统和第二接收系统的测量范围部分重合,则确定所述第一接收系统检测到的所述被测物与所述基准线之间的第一距离值、所述第二接收系统检测到的所述被测物与所述基准线之间的第二距离值、所述第一接收系统落入重合测量范围的第一边缘检测距离值、所述第二接收系统落入重合测量范围的第二边缘检测距离值;并根据所述第一距离值、所述第二距离值、所述第一边缘检测距离值、所述第二边缘检测距离值,确定所述重合测量范围对应的距离值。
3.根据权利要求1所述的激光测距系统,其特征在于,所述发射系统包括至少如下组件:
4.根据权利要求1所述的激光测距系统,其特征在于,每个所述接收系统包括至少如下组件:光学成像透镜、接收光阑、光电探测器;
5.根据权利要求4所述的激光测距系统,其特征在于,每个所述接收系统对应的最差测量精度,与如下至少之一因素相关:所述激光测距系统对像素点的识别能力、所述激光测距系统的传感头体积、所述激光测距系统的测量距离。
6.根据权利要求1至5中任意一项所述的激光测距系统,其特征在于,所述接收系统与所述发射系统之间的相对位置符合激光三角法测距原理。
7.一种激光测距方法,其特征在于,应用于激光测距系统中,所述激光测距系统包括:一个发射系统和至少两个接收系统,所述激光测距方法包括:
8.根据权利要求7所述的激光测距方法,其特征在于,所述激光测距方法还包括:
9.一种激光测距装置,其特征在于,所述激光测距装置包括:
10.一种电子设备,其特征在于,包括一个或多个处理器和存储器;
技术总结
本公开适用于激光测距技术领域,提供了一种激光测距系统、方法、装置及电子设备,本公开所提供的激光测距系统采用一个发射系统,向被测物的表面发射激光光束;至少两个接收系统,分别在各自对应的测量范围内检测被测物的表面在接收激光光束后返回的反射光束,并根据反射光束在每个接收系统各自的光电探测器上的成像位移,确定被测物与基准线之间的距离值,其中,相邻的两个接收系统的测量范围相衔接或部分重合。使得激光测距系统同时满足测量范围广、测量盲区小、体积小、测量精度高的特性。
技术研发人员:请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名
受保护的技术使用者:深圳深浦电气有限公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!