一种面向激光雷达点云的静态目标提取方法及系统与流程
本申请涉及数据处理相关领域,尤其涉及一种面向激光雷达点云的静态目标提取方法及系统。
背景技术:
1、随着科学技术的发展,特别是激光雷达点云领域的发展,首先,pointnet方法和lidar-mos方法均采用基于重复扫描模式的激光雷达点云作为输入,动态目标所形成的点云形态比较统一,分布比较稳定。但是,对于非重复扫描模式的激光雷达,其产生的每帧点云在空间上的分布各不相同,所以,即使对于同一个静态目标的相邻两帧扫描点云也会具有完全不同的点云分布,点云形态也会不同。所以,对于以上两类方法,无法保证它们能够基于非重复扫描激光雷达点云的训练过程和适用性能,同时在现有技术中通常是使用静态点云部分的特征作为参照,导致存在静态目标提取精度差技术问题。
技术实现思路
1、本申请通过提供一种面向激光雷达点云的静态目标提取方法及系统,解决了现有技术中通常是使用静态点云部分的特征作为参照,导致存在静态目标提取精度差技术问题,实现了在slam系统中进行静态目标点云的提取,能够增强系统运行的鲁棒性,而且更加可以提升定位的精准度和建立地图的准确性的技术效果。
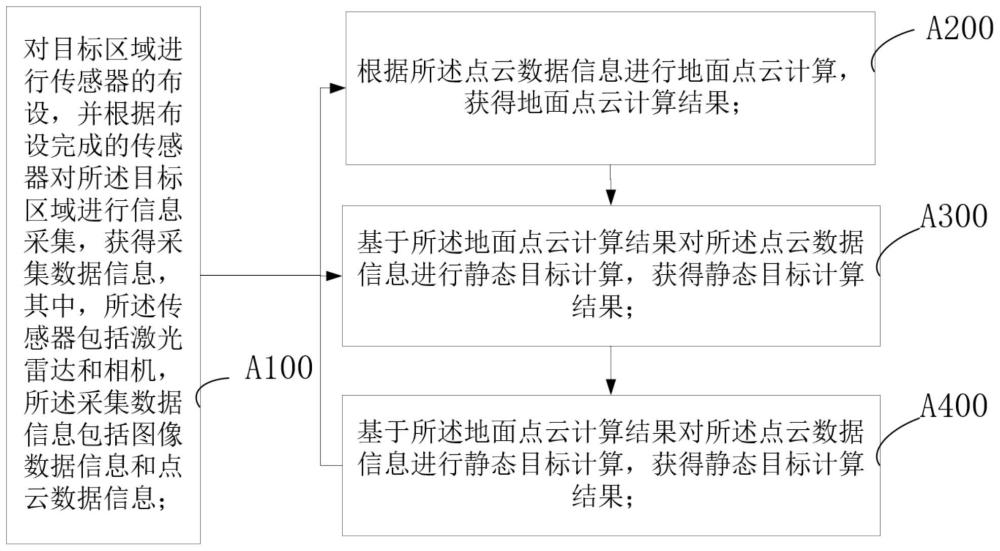
2、本申请提供一种面向激光雷达点云的静态目标提取方法,所述方法应用于一种面向激光雷达点云的静态目标提取系统,包括:对目标区域进行传感器的布设,并根据布设完成的传感器对所述目标区域进行信息采集,获得采集数据信息,其中,所述传感器包括激光雷达和相机,所述采集数据信息包括图像数据信息和点云数据信息;根据所述点云数据信息进行地面点云计算,获得地面点云计算结果;基于所述地面点云计算结果对所述点云数据信息进行静态目标计算,获得静态目标计算结果;基于所述静态目标计算结果,根据所述图像数据信息对所述点云数据信息进行动态点云过滤,生成静态目标提取结果。
3、在可能的实现方式中,根据所述点云数据信息进行地面点云计算,获得地面点云计算结果,执行以下处理:对所述点云数据信息进行地面点云提取,获得地面点云数据;根据所述地面点云数据进行点云特征计算,生成所述地面点云计算结果。
4、在可能的实现方式中,对所述点云数据信息进行地面点云提取,获得地面点云数据,执行以下处理:根据ransac算法对所述点云数据信息进行平面结构检测,获得点云平面结构检测结果;根据所述点云平面结构检测结果对所述点云数据信息进行地面点云提取,生成所述地面点云数据。
5、在可能的实现方式中,执行以下处理:所述点云特征计算包括计算所述地面点云数据的法向信息和平均高度
6、在可能的实现方式中,基于所述地面点云计算结果对所述点云数据信息进行静态目标计算,获得静态目标计算结果,执行以下处理:获得所述点云数据信息的点云扫描对象;对所述点云扫描对象进行垂直划分,获得高度阈值空间;基于所述地面点云计算结果和所述高度阈值空间,构建静态点云提取基准;根据预设voxel对所述激光雷达的扫描空间进行划分,构建三维voxel空间;基于所述静态点云提取基准和所述三维voxel空间计算静态点云部分概率,生成所述静态目标计算结果。
7、在可能的实现方式中,基于所述地面点云计算结果和所述高度阈值空间,构建静态点云提取基准,执行以下处理:基于所述点云数据信息,抽取帧点云;对所述帧点云进行地面点云删除,生成非地面点云部分;基于所述地面点云计算结果对所述非地面点云部分进行多级旋转,获得非地面更新点云;基于所述高度阈值空间对所述非地面更新点云进行提取,生成所述静态点云提取基准。
8、在可能的实现方式中,基于所述静态目标计算结果,根据所述图像数据信息对所述点云数据信息进行动态点云过滤,生成静态目标提取结果,执行以下处理:获得激光-相机坐标变换矩阵;基于所述点云数据信息,根据所述激光-相机坐标变换矩阵,对所述图像数据信息执行非地面点云投影,生成点云图像投影结果;根据所述点云图像投影结果进行可移动目标的激光点云提取,生成激光点云集合;根据所述激光点云集合进行聚类处理,建立动态点云voxel空间;基于所述动态点云voxel空间,生成静态点云voxel空间;调取地面点云部分和基于高度阈值空间构建的高度阈值外空间部分;根据所述地面点云部分、所述高度阈值外空间部分和所述静态点云voxel空间,生成所述静态目标提取结果。
9、本申请还提供了一种面向激光雷达点云的静态目标提取系统,包括:信息采集模块,所述信息采集模块用于对目标区域进行传感器的布设,并根据布设完成的传感器对所述目标区域进行信息采集,获得采集数据信息,其中,所述传感器包括激光雷达和相机,所述采集数据信息包括图像数据信息和点云数据信息;第一计算模块,所述第一计算模块用于根据所述点云数据信息进行地面点云计算,获得地面点云计算结果;第二计算模块,所述第二计算模块用于基于所述地面点云计算结果对所述点云数据信息进行静态目标计算,获得静态目标计算结果;动态点云过滤模块,所述动态点云过滤模块用于基于所述静态目标计算结果,根据所述图像数据信息对所述点云数据信息进行动态点云过滤,生成静态目标提取结果。
10、本申请中提供的一个或多个技术方案,至少具有如下技术效果或优点:
11、本申请提供的一种面向激光雷达点云的静态目标提取方法及系统,涉及数据处理技术领域,解决了现有技术中通常是使用静态点云部分的特征作为参照,导致存在静态目标提取精度差技术问题,实现了在slam系统中进行静态目标点云的提取,能够增强系统运行的鲁棒性,而且更加可以提升定位的精准度和建立地图的准确性的技术效果。
技术特征:
1.一种面向激光雷达点云的静态目标提取方法,其特征在于,所述方法包括:
2.如权利要求1所述的一种面向激光雷达点云的静态目标提取方法,其特征在于,根据所述点云数据信息进行地面点云计算,获得地面点云计算结果,包括:
3.如权利要求2所述的一种面向激光雷达点云的静态目标提取方法,其特征在于,对所述点云数据信息进行地面点云提取,获得地面点云数据,包括:
4.如权利要求2所述的一种面向激光雷达点云的静态目标提取方法,其特征在于,所述点云特征计算包括计算所述地面点云数据的法向信息和平均高度。
5.如权利要求1所述的一种面向激光雷达点云的静态目标提取方法,其特征在于,基于所述地面点云计算结果对所述点云数据信息进行静态目标计算,获得静态目标计算结果,包括:
6.如权利要求5所述的一种面向激光雷达点云的静态目标提取方法,其特征在于,基于所述地面点云计算结果和所述高度阈值空间,构建静态点云提取基准,包括:
7.如权利要求1所述的一种面向激光雷达点云的静态目标提取方法,其特征在于,基于所述静态目标计算结果,根据所述图像数据信息对所述点云数据信息进行动态点云过滤,生成静态目标提取结果,包括:
8.一种面向激光雷达点云的静态目标提取方法,其特征在于,所述系统用于实施权利要求1-7任一项所述的一种面向激光雷达点云的静态目标提取方法,所述系统包括:
技术总结
本发明公开了一种面向激光雷达点云的静态目标提取方法及系统,涉及数据处理相关领域,该方法包括:根据布设完成的传感器对所述目标区域进行信息采集,获得采集数据信息,根据点云数据信息进行地面点云计算,获得地面点云计算结果对所述点云数据信息进行静态目标计算,获得静态目标计算结果,根据图像数据信息对点云数据信息进行动态点云过滤,生成静态目标提取结果。解决了现有技术中通常是使用静态点云部分的特征作为参照,导致存在静态目标提取精度差技术问题,实现了在SLAM系统中进行静态目标点云的提取,能够增强系统运行的鲁棒性,而且更加可以提升定位的精准度和建立地图的准确性的技术效果。
技术研发人员:闫军,刘毅
受保护的技术使用者:智慧互通科技股份有限公司
技术研发日:
技术公布日:2024/6/20
- 还没有人留言评论。精彩留言会获得点赞!