一种窗口形变和应力三维分布的偏振测量方法
本发明涉及光学测量的,特别涉及一种窗口形变和应力三维分布的偏振测量方法。
背景技术:
1、深海装备是深海资源开发、科学探索的国之利器,全海深(最大深度约11000米)挑战技术极限。潜器依赖金属耐压壳和大厚度透明光学窗口构成的密封舱抵御静水压力,窗口也是深海载人潜器感知外界的主要途径。随着水深增加,窗口受到的水压增加,这会导致窗口发生如扭曲、膨胀等变形,并使得窗口与窗座之间的空间变化,影响潜器的光学、密封性能。窗口受压会出现应力集中的情况,在一些结构上存在弱点或缺陷的地方可能发生断裂,影响潜器结构的强度和稳定性。综上所述,对窗口的形变和应力分布进行检测,可保证潜器的安全性和可靠性。
2、当前的应力检测方法中:有限元法设置的仿真条件与真实情况存在差别时,所得结果与真实情况之间存在差异;应变片必须贴在待测物体上,且只能实现单方向、小区域的应变测量;散斑法需要在窗口表面喷涂材料;数字全息法对环境光要求高,且测量范围较窄。总之,目前缺少简易、可靠且高精度的窗口受压后形变和应力的三维分布的测量方法。
3、以上背景技术内容的公开仅用于辅助理解本发明的发明构思及技术方案,其并不必然属于本发明的现有技术,在没有明确的证据表明上述内容在本发明的发明日已经公开的情况下,上述背景技术不应当用于评价本发明的新颖性和创造性。
技术实现思路
1、本发明的目的在于提供一种窗口形变和应力三维分布的偏振测量方法,以能够非接触、无损伤、实时地测量窗口形变和应力的三维分布,且具有好的简易性、鲁棒性和高测量精度。
2、为实现上述目的,本发明采用以下技术方案:
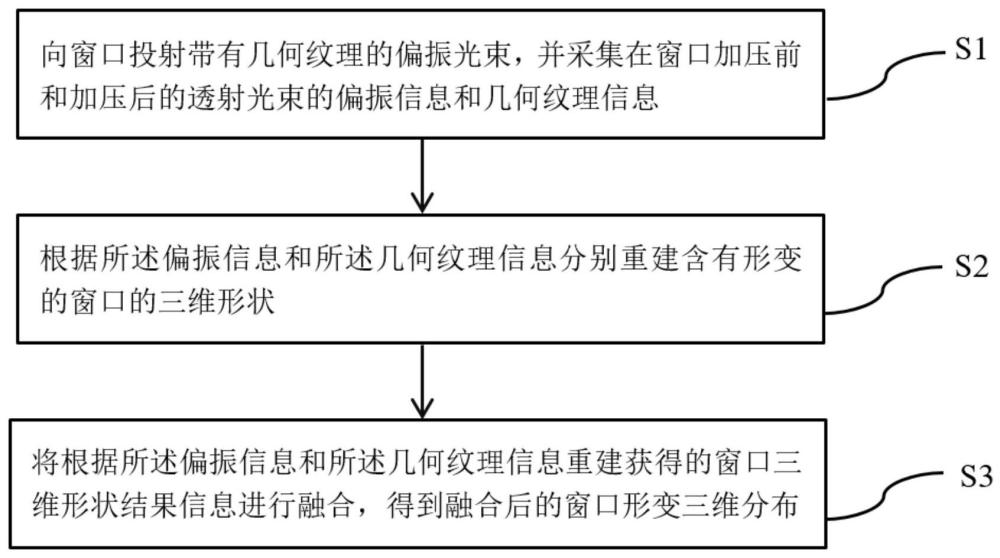
3、一种窗口形变和应力三维分布的偏振测量方法,包括如下步骤:s1、向窗口投射带有几何纹理的偏振光束,并采集在窗口加压前和加压后的透射光束的偏振信息和几何纹理信息;s2、根据所述偏振信息和所述几何纹理信息分别重建含有形变的窗口的三维形状;s3、将根据所述偏振信息和所述几何纹理信息重建获得的窗口三维形状结果信息进行融合,得到融合后的窗口形变三维分布。
4、在本发明的一些实施例中,步骤s2中,根据所述偏振信息重建窗口的三维形状包括:根据所述偏振信息,由stokes公式计算偏振度,利用偏振度以及窗口的折射率,根据菲涅尔折射定律计算天顶角,并计算偏振方位角以获得表面方位角;根据天顶角和表面方位角确定窗口表面的法向量;根据法向量中的梯度数据,通过全局曲面积分,获得窗口的三维形状。
5、在本发明的一些实施例中,步骤s2中,所述几何纹理包括网格图案,根据所述几何纹理重建窗口的三维形状包括:解析所述网格图案中的几何信息,通过边缘检测和角点检测图像处理提取网格的交点和弯曲点,计算窗口表面在所述交点和弯曲点处的位移和曲率信息,利用相机与窗口的几何关系和特征点匹配关系来构建三维点云,并由poisson重建得到窗口的三维形状。
6、在本发明的一些实施例中,步骤s3中,将根据所述几何纹理信息重建的较粗略的三维形状与根据所述偏振信息重建的具有像素级精度的三维形状进行加权平均。
7、在本发明的一些实施例中,还包括如下步骤:s4、根据偏振信息确定入射光束和透射光束各自的斯托克斯矢量信息,进一步得到窗口的缪勒矩阵图像,以融合后的窗口形变三维分布作为条件,通过特征解耦的方式从缪勒矩阵中包含的物理信息中获得窗口的一维等效应力分布,再使用逐层解析的方式,基于所述一维等效应力分布逐层分析窗口的应力分布,得到对应各层的二维应力分布图像,再合并多幅二维应力分布图像,实现对窗口应力三维分布的测量。
8、在本发明的一些实施例中,步骤s4中,通过偏振特征参数提取算法从所述缪勒矩阵图像提取出表征窗口的相位延迟性质的偏振参数特征,根据相位延迟为窗口轴向长度与折射率的乘积的关系,将融合后的窗口形变三维分布与所述相位延迟作为已知数据,分离出折射率分布信息,根据窗口受到单向作用力产生双折射效应且折射率的变化与应力大小成线性关系,计算窗口的一维等效应力分布。
9、在本发明的一些实施例中,建立窗口光学偏振属性的层析模型,将大厚度的窗口的偏振效应等效为多个小厚度的相位延迟器件的叠加作用,根据缪勒矩阵m与等效的多层相位延迟器件的关系,再由每层的厚度和相位延迟计算对应的折射率及应力分布,然后将得到的多幅二维应力分布图像沿垂直方向依次插入三维空间,从而得到窗口应力三维分布。
10、在本发明的一些实施例中,投射偏振光束的偏振照明系统包括平行光源、线偏振片和可旋转的第一四分之一波片,所述平行光源发出平行光束并依次经过线偏振片和可旋转的四分之一波片,得到不同偏振态的入射光,光束垂直入射在窗口上,穿透窗口后射出。
11、在本发明的一些实施例中,采集透射光束的偏振成像系统包括非偏振分束棱镜、可旋转的第二四分之一波片和两个分焦平面偏振相机,所述非偏振分束棱镜以50:50的比例将光分成两束,所述非偏振分束棱镜的透射光经过所述第二四分之一波片后由一个分焦平面偏振相机,反射光由另一个分焦平面偏振相机直接采集。
12、在本发明的一些实施例中,所述几何纹理通过设置在窗口与投射光源之间的透明网格胶片形成,所述透明网格胶片位于偏振器件之前。
13、本发明具有如下有益效果:
14、本发明通过主动照明、偏振成像和几何纹理的方式,向窗口投射带有几何纹理的偏振光束,从偏振信息和几何纹理信息两个角度同时解析,可提高数据的鲁棒性和测量精度,实现对窗口形变三维分布的测量;而且能够非接触、无损伤、实时地测量窗口形变的三维分布。相比现有的方法,本发明的方法可靠性好,测量精度高,且对测量条件要求较低。该方法应用在潜器上时,对潜器正常使用、安全保障有重要意义。
15、在本发明的一些实施例中,本发明实施例通过特征解耦的方式,利用缪勒矩阵中包含的物理信息,并将窗口的形变作为条件,分离出一维等效应力分布,再使用层析的方式,逐层分析窗口的应力分布,合并多幅二维图像,能够实现对窗口应力三维分布的测量。
技术特征:
1.一种窗口形变和应力三维分布的偏振测量方法,其特征在于,包括如下步骤:
2.如权利要求1所述的方法,其特征在于,步骤s2中,根据所述偏振信息重建窗口的三维形状包括:根据所述偏振信息,由stokes公式计算偏振度,利用偏振度以及窗口的折射率,根据菲涅尔折射定律计算天顶角,并计算偏振方位角以获得表面方位角;根据天顶角和表面方位角确定窗口表面的法向量;根据法向量中的梯度数据,通过全局曲面积分,获得窗口的三维形状。
3.如权利要求1所述的方法,其特征在于,步骤s2中,所述几何纹理包括网格图案,根据所述几何纹理重建窗口的三维形状包括:解析所述网格图案中的几何信息,通过边缘检测和角点检测图像处理提取网格的交点和弯曲点,计算窗口表面在所述交点和弯曲点处的位移和曲率信息,利用相机与窗口的几何关系和特征点匹配关系来构建三维点云,并由poisson重建得到窗口的三维形状。
4.如权利要求1所述的方法,其特征在于,步骤s3中,将根据所述几何纹理信息重建的较粗略的三维形状与根据所述偏振信息重建的具有像素级精度的三维形状进行加权平均。
5.如权利要求1所述的方法,其特征在于,还包括如下步骤:
6.如权利要求5所述的方法,其特征在于,步骤s4中,通过偏振特征参数提取算法从所述缪勒矩阵图像提取出表征窗口的相位延迟性质的偏振参数特征,根据相位延迟为窗口轴向长度与折射率的乘积的关系,将融合后的窗口形变三维分布与所述相位延迟作为已知数据,分离出折射率分布信息,根据窗口受到单向作用力产生双折射效应且折射率的变化与应力大小成线性关系,计算窗口的一维等效应力分布。
7.如权利要求5所述的方法,其特征在于,步骤s4中,建立窗口光学偏振属性的层析模型,将大厚度的窗口的偏振效应等效为多个小厚度的相位延迟器件的叠加作用,根据缪勒矩阵m与等效的多层相位延迟器件的关系,再由每层的厚度和相位延迟计算对应的折射率及应力分布,然后将得到的多幅二维应力分布图像沿垂直方向依次插入三维空间,从而得到窗口应力三维分布。
8.如权利要求1至7任一项所述的方法,其特征在于,投射偏振光束的偏振照明系统包括平行光源、线偏振片和可旋转的第一四分之一波片,所述平行光源发出平行光束并依次经过线偏振片和可旋转的四分之一波片,得到不同偏振态的入射光,光束垂直入射在窗口上,穿透窗口后射出。
9.如权利要求1至8任一项所述的方法,其特征在于,采集透射光束的偏振成像系统包括非偏振分束棱镜、可旋转的第二四分之一波片和两个分焦平面偏振相机,所述非偏振分束棱镜以50:50的比例将光分成两束,所述非偏振分束棱镜的透射光经过所述第二四分之一波片后由一个分焦平面偏振相机,反射光由另一个分焦平面偏振相机直接采集。
10.如权利要求1至9任一项所述的方法,其特征在于,所述几何纹理通过设置在窗口与投射光源之间的透明网格胶片形成,所述透明网格胶片位于偏振器件之前。
技术总结
本发明公开了一种窗口形变和应力三维分布的偏振测量方法,包括如下步骤:S1、向窗口投射带有几何纹理的偏振光束,并采集在窗口加压前和加压后的透射光束的偏振信息和几何纹理信息;S2、根据偏振信息和几何纹理信息分别重建含有形变的窗口的三维形状;S3、将根据偏振信息和几何纹理信息重建获得的窗口三维形状结果信息进行融合,得到融合后的窗口形变三维分布。本发明从偏振信息和几何纹理信息两个角度同时解析,可提高数据的鲁棒性和测量精度,实现对窗口形变三维分布的测量;而且能够非接触、无损伤、实时地测量窗口形变的三维分布。该方法应用在潜器上时,对潜器正常使用、安全保障有重要意义。
技术研发人员:廖然,补星莹,马辉
受保护的技术使用者:清华大学深圳国际研究生院
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!