激光雷达通道间串扰滤波方法、激光雷达及数据处理系统与流程
本发明涉及多通道雷达,尤其涉及一种激光雷达通道间串扰滤波方法、激光雷达及数据处理系统。
背景技术:
1、在激光雷达(lidar)技术领域,精确的距离测量和高分辨率的空间映射是其核心优势,这些特性使其在自动驾驶汽车、无人机导航、3d城市建模以及环境监测等多个应用场景中发挥重要作用。区别于单线激光雷达的平面扫描,多线激光雷达可以提供探测物体的高度信息,实现三维空间信息扫描,点频是多线激光雷达的一个重要指标参数,它可以综合反映雷达系统感知能力,为提高点频,多线激光雷达通常采用线阵型或面阵探测器,多个探测通道同时工作。但是多通道激光雷达通常面临探测通道间信号串扰问题,其原因是当激光雷达扫描目标是高反射率物体时,一个通道内的光敏像素接收到很强的回波能量,其导致旁边通道产生串扰噪声信号,表现为探测识别到的物体尺寸会比真实的尺寸大,影响激光雷达探测物体的准确性。
2、现有降低串扰的主要硬件手段往往是加宽探测器各通道间隙,该方法的缺点是降低探测面积有效利用率及需要更大的探测器芯片面积,增加成本,同时,通道间隙区域变大,也会导致较大的探测盲区。另外一种方法是在光敏像素周围实现阻挡沟槽,这种方法的更多依赖于物理材质筛选测试及制造工艺的提升,良率低,实现成本高。
3、另外也可通过软件手段解决串扰问题,软件手段解决串扰问题较硬件手段在成本和效率方面更具备优势。主流的软件方法包括利用多扫描角度下的多列数据进行运算处理,分析数据特征并确定串扰数据并删除,这类方法需要处理的数据量大,需要的数据缓存容量也大,存在点云数据输出实时性差,串扰数据过滤不够彻底等缺点。
4、因此,需要针对多通道激光雷达的串扰问题提出新的技术方案。
技术实现思路
1、本发明的目的是提供一种可实时对激光雷达探测到的数据进行串扰滤波处理并降低缓存容量的激光雷达通道间串扰滤波方法、激光雷达及数据处理系统。
2、为了实现上述目的,本发明提供了一种激光雷达通道间串扰滤波方法,其包括:
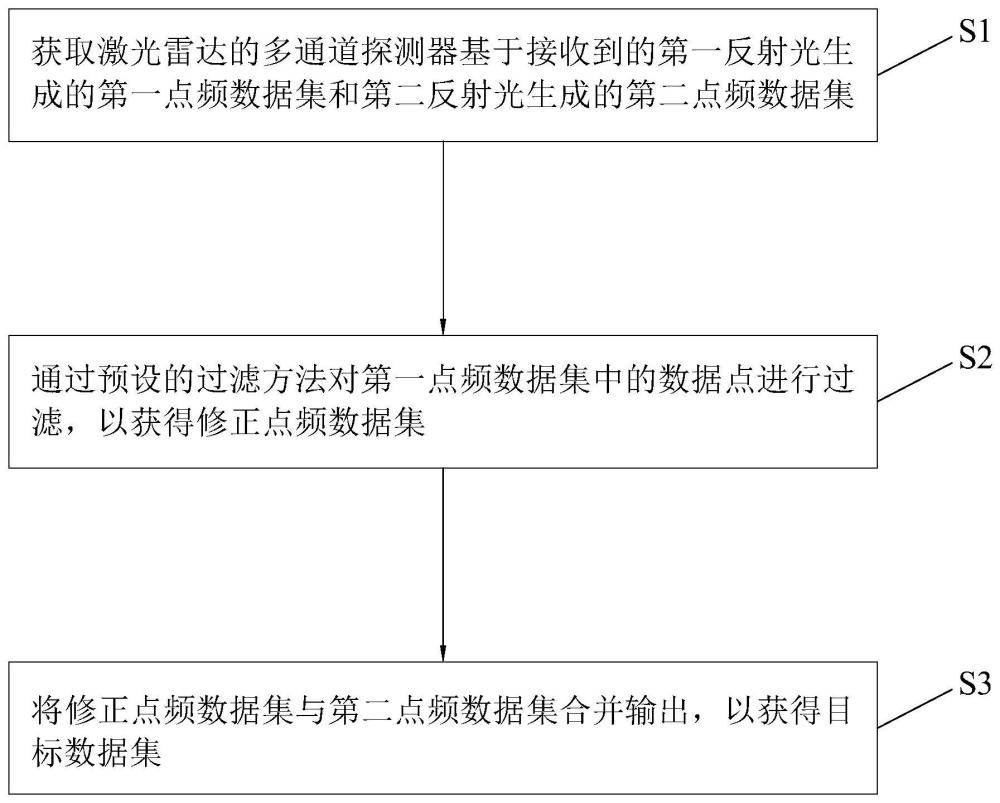
3、获取激光雷达的多通道探测器基于接收到的第一反射光生成的第一点频数据集和第二反射光生成的第二点频数据集;
4、所述第一反射光的光强大于所述第二反射光的光强;
5、通过预设的过滤方法对所述第一点频数据集中的数据点进行过滤,以获得修正点频数据集;
6、所述过滤方法包括:计算所述第一点频数据集中任一数据点与所述第二点频数据集中的任一数据点的距离差值,当该距离差值符合预设条件时,将与该距离差值相对应的所述第一点频数据集中相应的数据点删除;
7、将所述修正点频数据集与所述第二点频数据集合并输出。
8、较佳地,所述第一反射光和所述第二反射光的生成方法包括:
9、驱动所述激光雷达的发射器先后以第一功率和第二功率向同一目标物发射第一扫描光和第二扫描光,所述第一功率大于所述第二功率;
10、所述第一扫描光经由所述目标物反射形成所述第一反射光;
11、所述第二扫描光经由所述目标物反射形成所述第二反射光。
12、较佳地,所述发射器的驱动电路包括驱动电源和与所述驱动电源电性连接的发射电路,所述发射电路包括串联连接的激光源、电子脉冲开关,以及与所述激光源并联连接的储能电容;所述储能电容用于为所述激光源提供发射能量;所述电子脉冲开关用于为所述储能电容提供脉冲充电电源;所述驱动电路还包括与所述发射电路串联连接的触发控制开关。
13、较佳地,所述驱动电路包括至少两路所述发射电路,至少两路所述发射电路并联连接,且不同所述发射电路上的所述储能电容的容量不同;所述触发控制开关与至少两所述发射电路串联连接。
14、较佳地,通过过滤方法对所述第一点频数据集中的数据点进行过滤处理之前,还通过滑窗检测方法对所述第一点频数据集和所述第二点频数据集进行数据预处理。
15、较佳地,所述滑窗检测方法包括如下步骤:
16、s20:在当前滑窗内,判断任两数据点的差值是否小于或等于预设值,如果否,则进入s21,如果是,则进入s23;
17、s21:滑窗是否将待处理数据序列全部遍历,如果是,则进入s28,如果否,则进入s22;
18、s22:移动所述滑窗一个步长,并返回步骤s20;
19、s23:将当前所述滑窗中的全部的数据点预存到临近点集合中;
20、s24:滑窗是否将待处理数据序列全部遍历,如果是,则进入s28,如果否,则进入s25;
21、s25:移动所述滑窗一个步长;
22、s26:判断最新所述滑窗内新加入的一个数据点与其相邻的数据点的差值是否小于或等于预设值,如果是,则进入s27,如果否,则返回步骤s21;
23、s27:将当前新加入的数据点添加到所述临近点集合中,并返回步骤s25;
24、s28:将所述临近点集合中存储的数据点输出。
25、较佳地,所述过滤方法包括如下步骤:
26、s30:将所述第一点频数据集和所述第二点频数据集中的各个数据点配成初始的数据对;
27、s31:并行计算每一数据对的距离差值;
28、s32:当该距离差值符合要求时,对与该距离差值相对应的所述第一点频数据集中相应的数据点做标记;
29、s33:所述第一点频数据集中的每一数据点与所述第二点频数据集中的每一数据点是否轮流配对完毕,如果否,则进入步骤s34,如果是,则进入s35;
30、s34:调整所述第一点频数据集和所述第二点频数据集中的各个数据点的配对对象,以获得调整后的数据对,并返回步骤s31;
31、s35:将带有标记的所述第一点频数据集中的数据点删除。
32、本发明还提供一种激光雷达,其包括发射器、探测器以及数据处理系统,所述数据处理系统基于如上所述的激光雷达通道间串扰滤波方法对所述探测器探测到的数据进行处理。
33、本发明还提供一种激光雷达数据处理系统,其包括:
34、一个或多个处理器;
35、存储器;
36、以及一个或多个程序,其中一个或多个程序被存储在所述存储器中,并且被配置成由所述一个或多个处理器执行,所述程序包括用于执行如上所述的激光雷达通道间串扰滤波方法的指令。
37、本发明还提供一种计算机可读存储介质,其包括计算机程序,所述计算机程序可被处理器执行以完成如上所述的激光雷达通道间串扰滤波方法。
38、与现有技术相比,本发明上述技术方案提供的串扰滤波方法,获取并融合强弱曝光下的点频数据,利用弱曝光下多通道探测器不会发生通道间串扰这一特点,对强弱曝光点数据进行特征对比,可以筛选出强曝光下的串扰数据,并对其删除,这样可以从源头上消除激光雷达探测通道间串扰现象的影响,大幅提高激光雷达探测不同类型目标的适应性。
技术特征:
1.一种激光雷达通道间串扰滤波方法,其特征在于,包括:
2.根据权利要求1所述的激光雷达通道间串扰滤波方法,其特征在于,所述第一反射光和所述第二反射光的生成方法包括:
3.根据权利要求2所述的激光雷达通道间串扰滤波方法,其特征在于,所述发射器的驱动电路包括驱动电源和与所述驱动电源电性连接的发射电路,所述发射电路包括串联连接的激光源、电子脉冲开关,以及与所述激光源并联连接的储能电容;所述储能电容用于为所述激光源提供发射能量;所述电子脉冲开关用于为所述储能电容提供脉冲充电电源;所述驱动电路还包括与所述发射电路串联连接的触发控制开关。
4.根据权利要求3所述的激光雷达通道间串扰滤波方法,其特征在于,所述驱动电路包括至少两路所述发射电路,至少两路所述发射电路并联连接,且不同所述发射电路上的所述储能电容的容量不同;所述触发控制开关与至少两所述发射电路串联连接。
5.根据权利要求1所述的激光雷达通道间串扰滤波方法,其特征在于,通过过滤方法对所述第一点频数据集中的数据点进行过滤处理之前,还通过滑窗检测方法对所述第一点频数据集和所述第二点频数据集进行数据预处理。
6.根据权利要求5所述的激光雷达通道间串扰滤波方法,其特征在于,所述滑窗检测方法包括如下步骤:
7.根据权利要求1所述的激光雷达通道间串扰滤波方法,其特征在于,所述过滤方法包括如下步骤:
8.一种激光雷达,其特征在于,包括发射器、探测器以及数据处理系统,所述数据处理系统基于权利要求1至7任一项所述的激光雷达通道间串扰滤波方法对所述探测器探测到的数据进行处理。
9.一种激光雷达数据处理系统,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,包括计算机程序,所述计算机程序可被处理器执行以完成如权利要求1至7任一项所述的激光雷达通道间串扰滤波方法。
技术总结
本发明提供了一种激光雷达通道间串扰滤波方法、激光雷达及数据处理系统,其中该方法包括:获取激光雷达的多通道探测器基于接收到的第一反射光生成的第一点频数据集和第二反射光生成的第二点频数据集;第一反射光的光强大于第二反射光的光强;通过预设的过滤方法对第一点频数据集中的数据点进行过滤,以获得修正点频数据集;将修正点频数据集与第二点频数据集合并输出。本发明串扰滤波方法,利用弱曝光下多通道探测器不会发生通道间串扰这一特点,对强弱曝光点数据进行特征对比,可以筛选出强曝光下的串扰数据,并对其删除,这样可以从源头上消除激光雷达探测通道间串扰现象的影响,大幅提高激光雷达探测不同类型目标的适应性。
技术研发人员:廖达,任熙明,匡万,黄愚,宋云鹏
受保护的技术使用者:光为科技(广州)有限公司
技术研发日:
技术公布日:2024/7/18
- 还没有人留言评论。精彩留言会获得点赞!