一种无人车及其自动控制方法与系统与流程
本发明涉及一种无人车及其自动控制方法与系统,属于无人车自动控制领域。
背景技术:
1、随着时代的发展,我国越来越重视对于沙漠、戈壁等野外无人区环境的开发与探索,在开发或探索的初始阶段,由于无人区环境恶劣,为保证人员安全,需要利用无人车执行相应的任务。无人车在沙漠、戈壁等无人区工作时需要先抵达目的地,现有技术中在沙漠、戈壁等野外环境下执行任务的无人车,通过搭载车载光电单元,具有自动驾驶、巡逻侦查、识别目标与跟踪目标等能力。无人车可以按照规划的路线执行自主巡逻任务,也可以到指定地点执行侦察任务。由于无人车工作环境的特殊性,在执行任务的去程和返程的过程中,采用基于北斗卫星差分定位的自主导航方式,并能够与指挥控制系统保持实时通信与信息交互。
2、授权公告号为cn210793405u的中国实用新型授权公告文件基于agx计算平台提供了一种多传感融合智能车,此实用新型通过导航定位模块与agx计算平台电性连接的方式使得无人车可以通过人工远程控制遥控器驾驶,也可以通过惯导主机,以及与惯导主机电性连接的方向天线、定位天线和4g天线组成的导航定位模块进行自动寻迹驾驶。
3、但由于无人车工作环境恶劣,极有可能出现在野外工作时通信受到干扰或中断的现象,一旦出现通信受到干扰或中断,甚至北斗卫星差分定位模块损坏,则无人车不但无法到达目的地,还需要基地派出救援无人车,甚至还有可能导致失联的状况。由于现有技术中无人车自动驾驶的抗干扰能力差,现有技术中的无人车在通信模块受到干扰后易失联,无法按原计划抵达目的地,极易耽误任务进度,用户体验较差。
技术实现思路
1、本发明的目的是提供一种无人车及其自动控制方法与系统,用以解决现有技术中无人车在通信模块受到干扰后无法按原计划抵达目的地的问题。
2、为实现上述目的,本发明的方案包括:
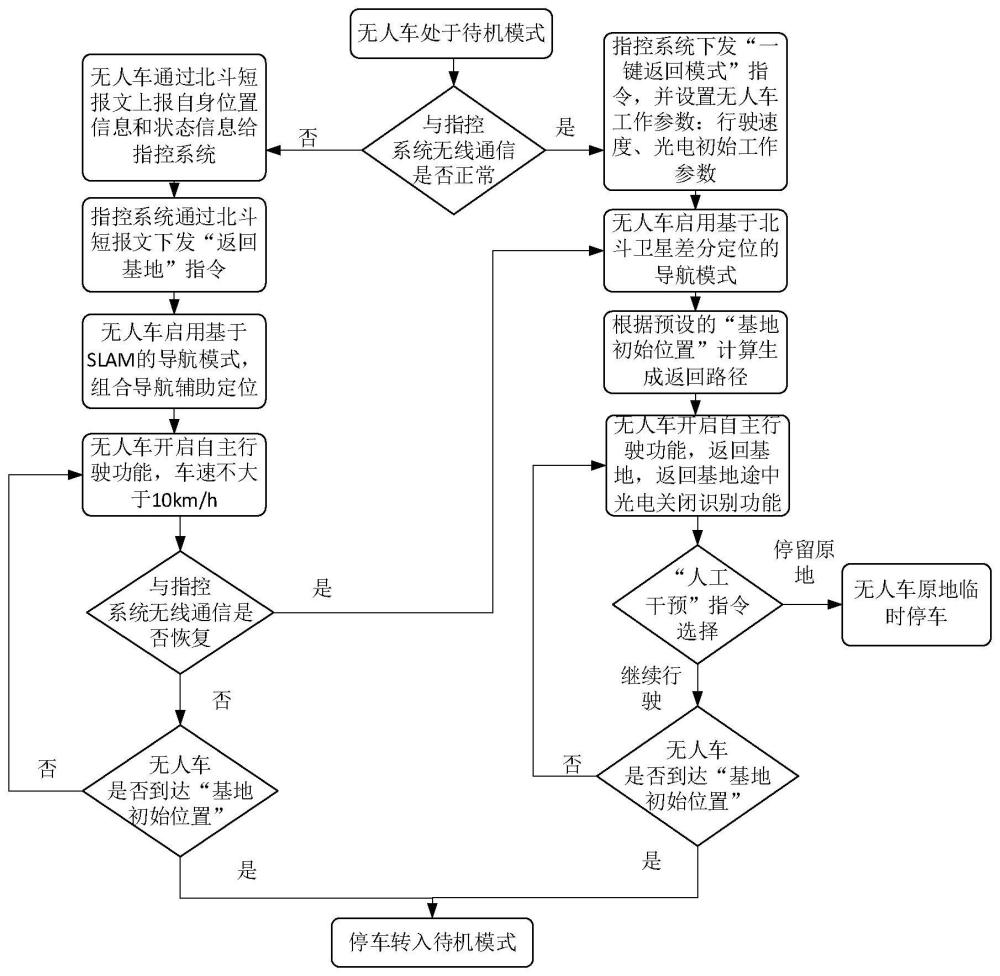
3、本发明的一种无人车自动控制方法,当判断无人车与控制端的通信正常时,无人车通过卫星差分定位导航行驶以抵达目的地;当判断无人车与控制端的通信异常时,无人车通过slam定位与组合导航行驶抵达目的地。
4、进一步地,无人车通过所述slam定位与组合导航行驶时,实时判断无人车与控制端的通信连接状态,当无人车与所述控制端的通信恢复正常后,无人车通过所述卫星差分定位导航行驶以抵达目的地;当无人车与控制端的通信仍然异常,则继续通过所述slam定位与组合导航行驶。
5、进一步地,当判断无人车与所述控制端的通信异常后,无人车通过卫星短报文发送自身位置信息与自身状态信息给所述控制端,所述控制端通过所述卫星短报文下发指令控制无人车通过所述slam定位与组合导航行驶。
6、进一步地,当判断无人车与所述控制端的通信异常后,无人车停止移动,并进入待机模式,等待控制端通过所述卫星短报文下发的指令。
7、进一步地,无人车通过所述slam定位与组合导航行驶时,车速不大于10km/h。
8、进一步地,所述自身位置信息包括经度、纬度、海报高度与航向角度,所述自身状态信息包括剩余电量、剩余油量、最后一次通信连通的时间、上次接到的指令、上次指令执行情况以及设备故障状态。
9、进一步地,当无人车通过所述卫星差分定位导航行驶时,无人车关闭光电识别功能。
10、进一步地,当无人车通过所述卫星差分定位导航行驶时,若需要无人车停车,则通过所述控制端下发人工干预指令,控制无人车停留原地或继续行驶。
11、本发明的一种无人车自动控制系统,包括处理器、存储器,所述处理器与存储器电性连接,处理器用于执行实现存储于存储器中的如上所述的无人车自动控制方法。
12、本发明的一种无人车,包括无人车自动控制系统,所述无人车自动控制系统为上述的任一种无人车自动控制系统。
13、本发明的有益效果为:
14、通过在无人车与控制端的通信正常和无人车与控制端的通信异常分情况设置两种导航方式,当无人车与控制端的通信正常时无人车采用卫星差分定位导航的方式行驶,当无人车与控制端的通信异常时无人车采用slam定位与组合导航的方式行驶。使得在无人车与控制端的通信正常时无人车能够及时抵达目的地,在无人车与控制端的通信异常时,无人车也能按原计划抵达目的地。有效解决了现有技术中无人车在通信模块受到干扰后无法按原计划抵达目的地的问题。
技术特征:
1.一种无人车自动控制方法,其特征在于,当判断无人车与控制端的通信正常时,无人车通过卫星差分定位导航行驶以抵达目的地;当判断无人车与控制端的通信异常时,无人车通过slam定位与组合导航行驶抵达目的地。
2.根据权利要求1所述的无人车自动控制方法,其特征在于,无人车通过所述slam定位与组合导航行驶时,实时判断无人车与控制端的通信连接状态,当无人车与所述控制端的通信恢复正常后,无人车通过所述卫星差分定位导航行驶以抵达目的地;当无人车与控制端的通信仍然异常,则继续通过所述slam定位与组合导航行驶。
3.根据权利要求1所述的无人车自动控制方法,其特征在于,当判断无人车与所述控制端的通信异常后,无人车通过卫星短报文发送自身位置信息与自身状态信息给所述控制端,所述控制端通过所述卫星短报文下发指令控制无人车通过所述slam定位与组合导航行驶。
4.根据权利要求3所述的无人车自动控制方法,其特征在于,当判断无人车与所述控制端的通信异常后,无人车停止移动,并进入待机模式,等待控制端通过所述卫星短报文下发的指令。
5.根据权利要求1所述的无人车自动控制方法,其特征在于,无人车通过所述slam定位与组合导航行驶时,车速不大于10km/h。
6.根据权利要求3所述的无人车自动控制方法,其特征在于,所述自身位置信息包括经度、纬度、海报高度与航向角度,所述自身状态信息包括剩余电量、剩余油量、最后一次通信连通的时间、上次接到的指令、上次指令执行情况以及设备故障状态。
7.根据权利要求1所述的无人车自动控制方法,其特征在于,当无人车通过所述卫星差分定位导航行驶时,无人车关闭光电识别功能。
8.根据权利要求1所述的无人车自动控制方法,其特征在于,当无人车通过所述卫星差分定位导航行驶时,若需要无人车停车,则通过所述控制端下发人工干预指令,控制无人车停留原地或继续行驶。
9.一种无人车自动控制系统,包括处理器、存储器,其特征在于,所述处理器与存储器电性连接,处理器用于执行实现存储于存储器中的如权利要求1~8任一项所述的无人车自动控制方法。
10.一种无人车,其特征在于,包括无人车自动控制系统,所述无人车自动控制系统为权利要求9所述的一种无人车自动控制系统。
技术总结
本发明涉及一种无人车及其自动控制方法与系统,当判断无人车与控制端的通信正常时,无人车通过卫星差分定位导航行驶以抵达目的地;当判断无人车与控制端的通信异常时,无人车通过SLAM定位与组合导航行驶抵达目的地。使得在无人车与控制端的通信正常时无人车能够及时抵达目的地,在无人车与控制端的通信异常时,无人车也能按原计划抵达目的地。有效解决了现有技术中无人车在通信模块受到干扰后无法按原计划抵达目的地的问题。
技术研发人员:江和耀,刘家胜,王永海,胡易,王永超,袁宇飞
受保护的技术使用者:中国船舶集团有限公司第七一三研究所
技术研发日:
技术公布日:2024/6/30
- 还没有人留言评论。精彩留言会获得点赞!