本发明属于路径规划领域,具体涉及一种基于几何拓扑结构的路径规划方法。
背景技术:
1、传统路径规适用于障碍物简单情况,搜索算法一般分为非启发式搜索、启发式搜索,非启发式搜索算法无差别向四周搜索效率低,启发式搜索有时容易陷入封闭区域,具体如图1所示。
2、启发式搜索算法一般需要动态规划,不适用并行计算。目前,位于城市道路中,路网图十分复杂,路网中具有封闭区域,例如图1中障碍物是一个向左开口的u型,理想中路径规划效果是图1中左边效果,但是基于传统启发式搜索算法会根据当前位置距离出口位置距离远近选择规划路径,通过图1右边观察可以看出启发式搜索算法会首先进入u型区,然后搜索u型区域发现路径不可走,最后走出u型区域发现正确路径道路。实际路网图中会有大量这种u型区域,因此传统算法对这种路径规划效果不理想。
技术实现思路
1、(一)要解决的技术问题
2、本发明要解决的技术问题是如何提供一种基于几何拓扑结构的路径规划方法,以解决传统算法对这种路径规划效果不理想的问题。
3、(二)技术方案
4、为了解决上述技术问题,本发明提出一种基于几何拓扑结构的路径规划方法,该方法包括如下步骤:
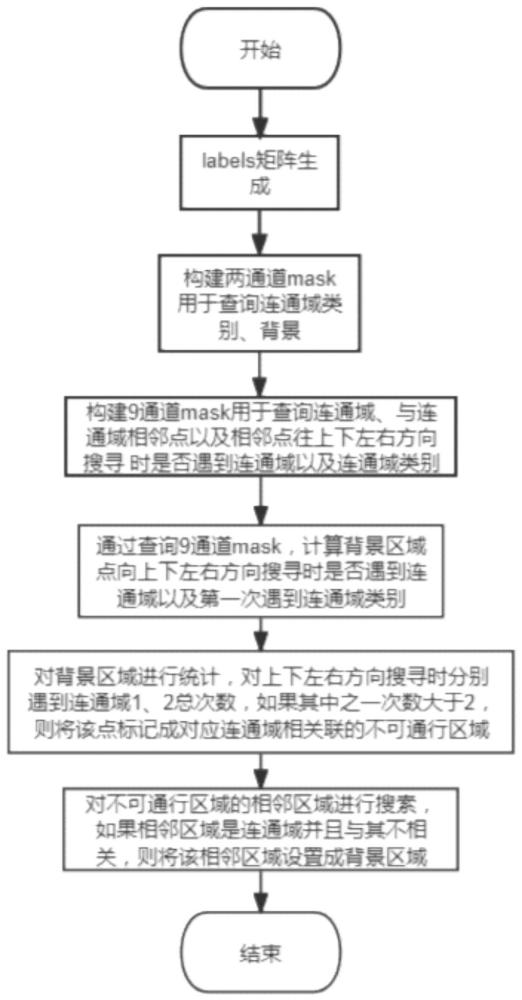
5、s1、对路网输入图片进行连通域分析,输出labels矩阵,labels矩阵(a,b,0)的值为0表示(a,b)像素属于背景区域,值为i表示属于第i个连通域,根据labels矩阵进行绘图;
6、s2、构建output矩阵,用于查询连通域类别、背景,根据labels矩阵,对output矩阵进行标记;
7、s3、构建tmp矩阵,用于查询连通域、与连通域相邻点以及相邻点往上下左右方向搜寻时是否遇到连通域以及连通域类别,根据output矩阵对tmp矩阵进行标记;
8、s4、通过查询tmp矩阵,计算背景区域点向上下左右方向搜寻时是否遇到连通域以及第一次遇到的连通域类别;
9、s5、根据tmp矩阵对背景区域进行统计,对上下左右方向搜寻时分别遇到连通域i总次数,如果其中之一次数大于2,则将该点标记成连通域i的u型区域;
10、s6、构建result1矩阵,对不可通行区域的相邻区域进行搜索,如果相邻区域是连通域并且与其不相关,则将该相邻区域设置为背景区域;
11、s7、获取背景区域的连通区域,整个路径规划任务通过这个区域进行。
12、(三)有益效果
13、本发明提出一种基于几何拓扑结构的路径规划方法,本发明基于拓扑结构规划算法,采用全局处理技术可以进行并行化计算,不同于传统启发式算法,该算法可以提前计算出封闭区域,从而避免路径的重复。
技术特征:1.一种基于几何拓扑结构的路径规划方法,其特征在于,该方法包括如下步骤:
2.如权利要求1所述的基于几何拓扑结构的路径规划方法,其特征在于,路网输入图片需要预先处理,处理后输入图片为二值图,背景区域为0,障碍物为1。
3.如权利要求1所述的基于几何拓扑结构的路径规划方法,其特征在于,连通域指图像中具有相同像素值且位置相邻的前景像素点组成的图像区域,当位于连通域内像素点向上下左右四个方向上搜索时,如果至少有三个方向上第一次搜索到前景区域是同一个连通域,则这个像素点位于u型区域内。
4.如权利要求1所述的基于几何拓扑结构的路径规划方法,其特征在于,所述步骤s1中,连通域分析算法调用opencv模块,不断搜索前景像素点相邻区域像素点,直到相邻像素点都是背景为止,并且将已经搜索到的前景像素点组成一个区域。
5.如权利要求1-4任一项所述的基于几何拓扑结构的路径规划方法,其特征在于,所述步骤s1具体包括:通过调用opencv模块进行图片读入、中值滤波、图片二值化、膨胀操作,准备工作完成后用connectedcomponentswithstats函数进行连通域分析,输出变量中labels是一个宽、高和输入图片一样并且只有一个通道的mask,labels为矩阵,是一个查询表,设输入图片宽度、高度分别为w、h,labels维度为(w,h,1),其中第三个参数为1,表示只有1个通道;labels矩阵(a,b,0)的值为0表示(a,b)像素属于背景区域,值为1表示属于连通域1,值为2表示属于连通域2,所以背景位置为0,大于0位置表示对应连通域;根据labels矩阵进行绘图,0区域像素取黑色,表示背景区域,1区域像素取绿色,表示连通域1,2区域像素取棕色,表示连通域2。
6.如权利要求5所述的基于几何拓扑结构的路径规划方法,其特征在于,所述步骤s2具体包括:构建两通道mask,形状分别是输入图片宽、高,通道数是2,对应output,output维度为(w,h,2);
7.如权利要求6所述的基于几何拓扑结构的路径规划方法,其特征在于,所述步骤s3具体包括:
8.如权利要求7所述的基于几何拓扑结构的路径规划方法,其特征在于,所述步骤s4具体包括:按照tmp第九通道对所有像素点进行搜索,如果值小于1,则表明该点属于背景并且不与连通域相邻;对所有这种点进行上下左右搜索,直到发现第一个点对应tmp第九通道值等于1;其中,某点tmp所在第九通道等于0,则按照上下左右顺序搜索,首先向上搜索当发现所在点tmp第九通道等于1,则表明搜索到边界点,则将该边界点对应tmp数据0、1、4、5通道值赋值给该点,其中0、1表示该边界点向上下搜索时是否搜索到连通域1,4、5表示该边界点向上下搜索时是否搜索到连通域2,如果搜索到则赋1,否则赋0,其余方向也是按照该操作进行。
9.如权利要求8所述的基于几何拓扑结构的路径规划方法,其特征在于,所述步骤s5具体包括:按照tmp数据对所有背景区域点上下左右方向进行统计,其中,tmp中0、1、2、3通道数值和大于2表示该点属于连通域1的u型区域,4、5、6、7通道数值和大于2表示该点属于连通域2的u型区域。
10.如权利要求9所述的基于几何拓扑结构的路径规划方法,其特征在于,所述步骤s6具体包括:背景区域被分开是由于连通域1进入了连通域2的u型区域内造成的,通过判断连通域u型区域边界是否与其他连通域相交,然后将该边界附近u型区域设计成背景,即可将背景区域连通;其中,设计一个四通道的mask,该mask是result1,四个通道分别对应连通域1、连通域2、连通域1的u型区域、连通域2的u型区域,然后通过result1找出u型区域中边界是其余连通域的像素,并将其修改成背景区域。
技术总结本发明涉及一种基于几何拓扑结构的路径规划方法,属于路径规划领域。本发明对路网输入图片进行连通域分析,输出labels矩阵,根据labels矩阵进行绘图;构建output矩阵,用于查询连通域类别、背景;构建tmp矩阵,用于查询连通域、与连通域相邻点以及相邻点往上下左右方向搜寻时是否遇到连通域以及连通域类别;通过查询tmp矩阵,计算背景区域点向上下左右方向搜寻时是否遇到连通域以及第一次遇到的连通域类别;根据tmp矩阵对背景区域进行统计,标记U型区域;构建result1矩阵,对不可通行区域的相邻区域进行搜索。本发明基于拓扑结构规划算法,采用全局处理技术可以进行并行化计算,可以提前计算出封闭区域,从而避免路径的重复。
技术研发人员:何辰飞,濮约刚,黄聿澍,张明庆,陈博
受保护的技术使用者:北京计算机技术及应用研究所
技术研发日:技术公布日:2024/5/6