一种沙姆成像远心投影三维测量系统及其校准方法
本发明涉及表面结构三维测量,特别是一种沙姆成像远心投影三维测量系统及其校准方法。
背景技术:
1、近些年来,由于精密制造和集成化技术的发展,大量工业产品设计往高精度和微小化方向发展,因此,机械加工和制造标准必须满足更加严格的约束。三维测量作为一种获取表面结构的方法,可以满足现代工业对三维数据等更多细节的检测要求,目前主流的非接触式光学三维测量方法有结构光投影法、散焦恢复形状法、激光线扫法和飞行时间法等。条纹投影轮廓术作为结构光投影法的一种,利用了正弦相位编码的高空间分辨率的特点,可以实现高精度、高分辨率的三维形状测量,并且其对环境光照和表面反射率引起的相位噪声具有更强的鲁棒性,因此在工业测量中得到了广泛的应用。
2、由于远心镜头具有畸变低、高分辨率、无透视误差、放大倍率恒定、景深大等优点,近几年来,远心镜头已成为结构光系统重建小尺寸物体的重要手段之一。目前使用远心透镜的条纹投影三维测量系统存在的问题主要有以下两方面。
3、一方面,由于几乎所有系统的投影仪与相机都呈一定角度布置,这使得相机或投影仪在倾斜拍摄或投影物体时的有效景深范围显著减小,这将导致拍摄或投影的图案只有一部分处于聚焦状态,其余部分则处于离焦状态,限制了可测量物体的大小和高度,若倾斜放置的是远心透镜,则将进一步压缩公共聚焦区域。沙姆镜头能够很好地解决这一问题,但沙姆模型由于光轴与像面并不垂直,需重新定义其畸变模型,目前尚无统一完备的描述模型。
4、另一方面,对于远心镜头的标定,目前尚无成熟的标定算法,由于远心透镜对z轴方向的深度变化并不敏感,导致外参的部分缺失,需要用适当的方法对外参进行还原补全,另外,在还原外参的过程中还存在符号的不确定性问题,相关研究提出的方法有的需要用到高精度的微动平台,这将大大增加系统成本,而且对平台的位置也有严格的要求,给操作和安装带来不便。而有的则无法使求解出的旋转矩阵严格满足正交性,导致内外参的分离出现偏差,从而难以实现对外部参数的高精度校准。
技术实现思路
1、为解决现有技术中存在的上述缺陷,本发明的目的在于提供一种沙姆成像远心投影三维测量系统及其校准方法,通过在远心系统标定和计算投影仪到相机的位姿关系中采用非线性优化,进一步减小校准误差,从而提高系统标定的精度。
2、本发明是通过下述技术方案来实现的。
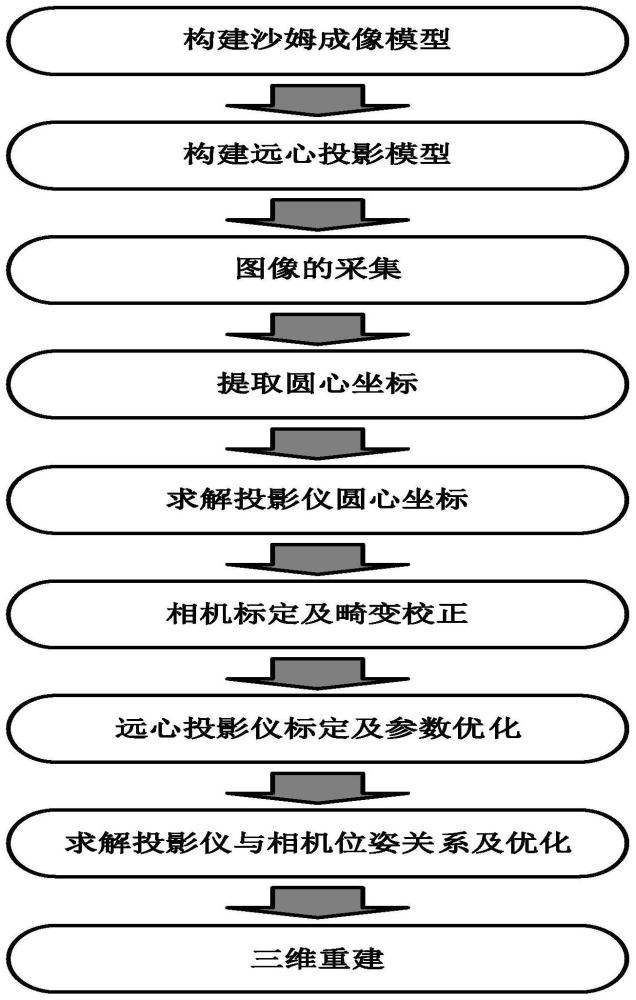
3、根据本发明的一个方面,提供了沙姆成像远心投影三维测量校准方法,包括:
4、构建沙姆成像投影模型和远心投影模型;
5、采集包括白光投影、水平条纹图案和竖直条纹图案图像;
6、根据采集的每组图像中的白光投影图像,提取出标定板每个圆心的图像坐标;
7、根据采集的每组图像中的水平条纹图案和竖直条纹图案,得到每个圆心的图像坐标的水平方向和竖直方向的绝对相位值,获得投影仪圆心坐标;
8、根据白光投影图像提取出标定板每个圆心的图像坐标,通过构建的沙姆成像投影模型对相机畸变进行校正;
9、根据水平条纹图案和竖直条纹图案得到的投影仪圆心坐标,通过构建的远心投影模型对远心投影仪标定及参数优化;
10、对标定及参数优化的远心投影仪进行相机与远心投影仪的相对位姿关系确定及优化;
11、根据相机和投影仪各自与世界坐标的对应关系,获得远心投影仪三维坐标点。
12、根据本发明的示例性实施方式,所述通过构建的沙姆成像投影模型对相机畸变进行校正,包括:
13、提取的圆心坐标和圆形标定板圆心的真实世界坐标,利用奇异值分解求解世界坐标系到图像坐标系的单应矩阵;
14、利用旋转矩阵的正交性得到两个约束,根据约束条件从单应矩阵中分离出内参,还原出外参;
15、使用levenberg-marquardt优化算法对内外参进行优化,完成对相机畸变进行校正。
16、根据本发明的示例性实施方式,所述通过构建的远心投影模型对远心投影仪标定及参数优化,包括:
17、根据得到的投影仪圆心的亚像素坐标和圆心标定板圆心的真实世界坐标,求解世界坐标系到图像坐标系的单应矩阵;
18、利用奇异值分解求出投影仪内参的初值,根据内参初值通过远心模型求出投影仪在每张标定图像下的外参;
19、对内参和不完整的外参进行优化,并引入径向畸变迭代求解;
20、将外参进行还原补全,得到优化后的参数。
21、根据本发明的另一方面,提供了一种所述方法的沙姆成像远心投影三维测量校准系统,包括:
22、投影系统,包括dmd投影仪和远心成像镜头,垂直于被测物体平面,用于向物平面投影数字条纹图案;
23、成像系统,包括至少一个高分辨率工业相机和相机沙姆镜头,与投影系统呈一个角度或多个视角,用于捕捉被测物体表面反射的经过物体表面形貌调制后的条纹图案,对被测物体表面形貌进行三维重建。
24、本发明由于采取以上技术方案,其具有以下有益效果:
25、1.本发明设计了一种新的远心投影沙姆成像三维测量系统,系统使用带沙姆镜头的相机和带远心镜头的投影仪。沙姆镜头很好地解决了相机倾斜放置时景深范围过小的问题,而远心透镜减小了投影条纹的畸变和景深,使得系统能够在较大视场内进行快速、高精度的三维测量。
26、2.本发明提出了一种远心投影与沙姆成像三维测量系统的标定及参数优化方法,构建了新的沙姆成像数学模型,并在远心系统标定和计算投影仪到相机的位姿关系中通过非线性优化进一步减小了校准误差,从而提高了系统标定的精度。
27、3.本发明可以根据实际测量需求增加相机数目,利用多个视角进行互补测量,以有效解决测量复杂结构表面时的表面阴影遮挡、测量高反射率表面时过曝导致局部信息缺失等问题,灵活度高、适应性强。
技术特征:
1.一种沙姆成像远心投影三维测量校准方法,其特征在于,包括:
2.根据权利要求1所述的沙姆成像远心投影三维测量校准方法,其特征在于,沙姆成像投影模型为:
3.根据权利要求1所述的沙姆成像远心投影三维测量校准方法,其特征在于,远心投影模型为:
4.根据权利要求1所述的沙姆成像远心投影三维测量校准方法,其特征在于,对应与投影仪中的圆心坐标为:
5.根据权利要求1所述的沙姆成像远心投影三维测量校准方法,其特征在于,通过构建的沙姆成像投影模型对相机畸变进行校正,包括:
6.根据权利要求1所述的沙姆成像远心投影三维测量校准方法,其特征在于,通过构建的远心投影模型对远心投影仪标定及参数优化,包括:
7.根据权利要求6所述的沙姆成像远心投影三维测量校准方法,其特征在于,对内参和不完整的外参进行优化,优化方法表示为下式:
8.根据权利要求1所述的沙姆成像远心投影三维测量校准方法,其特征在于,对标定及参数优化的远心投影仪进行相机与远心投影仪的相对位姿关系确定及优化,优化方法可表示为:
9.根据权利要求1所述的沙姆成像远心投影三维测量校准方法,其特征在于,获得远心投影仪三维坐标点,将坐标统一到投影仪坐标系下:
10.一种如权利要求1-9任一项所述方法的沙姆成像远心投影三维测量系统,其特征在于,包括:
技术总结
本发明公开了一种沙姆成像远心投影三维测量系统及其校准方法,构建沙姆成像投影模型和远心投影模型;采集包括白光投影、水平条纹图案和竖直条纹图案图像;提取出标定板每个圆心的图像坐标;得到每个圆心的图像坐标的水平方向和竖直方向的绝对相位值,获得投影仪圆心坐标;通过构建的沙姆成像投影模型对相机畸变进行校正;通过构建的远心投影模型对远心投影仪标定及参数优化;对标定及参数优化的远心投影仪进行相机与远心投影仪的相对位姿关系确定及优化;根据相机和投影仪各自与世界坐标的对应关系,获得远心投影仪三维坐标点。通过在远心系统标定和计算投影仪到相机的位姿关系中采用非线性优化,进一步减小校准误差,从而提高系统标定的精度。
技术研发人员:张国锋,姚潜,杨树明,马文浩,邓惠文
受保护的技术使用者:西安交通大学
技术研发日:
技术公布日:2024/6/18
- 还没有人留言评论。精彩留言会获得点赞!