车载定位信息管理方法与流程
本发明涉及车载定位信息领域,具体为车载定位信息管理方法。
背景技术:
1、车载定位信息系统是以确定空间位置为目标而构成的相互关联的信息交流系统,简单地说,这是一个由覆盖全球的多颗卫星组成的卫星系统,这个系统可以保证在任意时刻,地球上任意一点都可以同时观测到4颗卫星,以保证卫星可以采集到该观测点的经纬度和高度,以便实现导航、定位、授时等功能,用来引导车辆准确地沿着选定的路线,准时到达目的地。
2、如公开(公告)号:cn105388508a的发明提供了一种车载定位信息系统,包括主控制器模块、gps定位模块、北斗卫星定位模块、自检芯片模块、供电模块、显示屏模块、音频输出模块、接口模块和行车记录摄像头模块,gps定位模块和北斗卫星定位模块分别连接到主控制器模块的数据接口,主控制器模块的控制接口连接有显示屏模块和音频输出模块,自检芯片模块与主控制器模块连接,供电模块接入主控制器模块的供电接口,主控制器模块上还设置有接口模块,所述行车记录摄像头模块连接到所述主控制器模块。有益效果是能够结合gps定位和北斗卫星定位,定位准确,卫星定位信号不容易中断,而且能够进行自检,导航准确。
3、上述发明的车载定位信息系统大都使用gps定位系统,但是gps在高楼林立的市区,卫星信号容易受到遮挡,导致定位不准确,同时当车辆进入室内停车场时,由于gps信号较弱,车辆无法在室内停车场中得到准确的定位,降低了定位效率,为此,本申请提出了车载定位信息管理方法解决上述问题。
技术实现思路
1、本发明的目的在于提供车载定位信息管理方法,以解决上述背景技术中提出的问题。
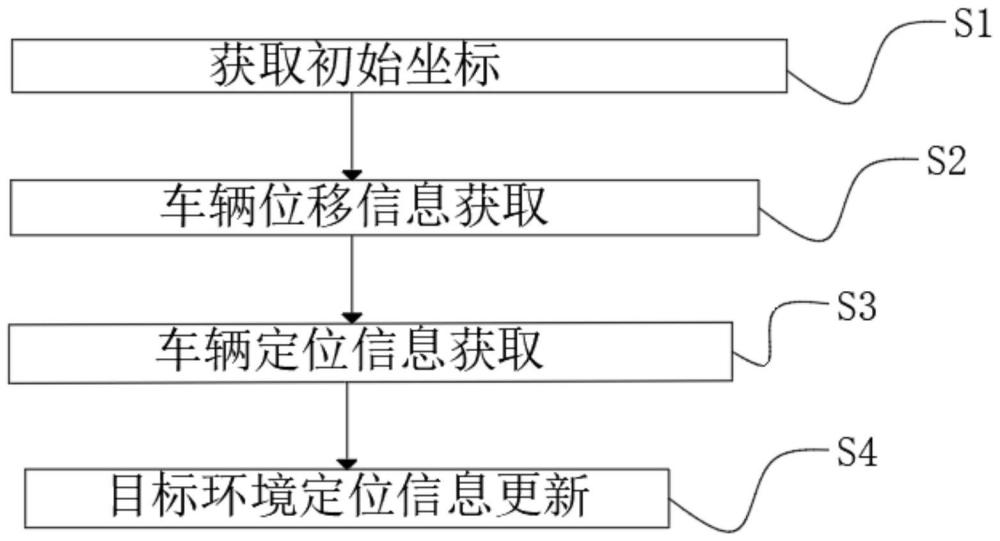
2、为实现上述目的,车载定位信息管理方法,包括如下步骤:
3、步骤s1,依据导航信息,获取车辆在目标环境的空间位置信息,所述目标环境为gps信号强度小于预设值的环境;
4、步骤s2,基于步骤s1的空间位置信息,获取车辆环视相机原始图像信息,并基于相机位移的计算从而获取车辆在环境中的位移信息;
5、步骤s3,基于步骤s2的车辆在环境中的位移信息以及车辆在目标环境的空间位置信息,从而计算出车辆在目标环境位移时的定位信息;
6、步骤s4,当gps信号强度大于预设值恢复卫星定位时,向云端服务器发送步骤s3车辆在目标环境位移时的定位信息集合并储存,记作ki={x1,x2,x3……xn-1,xn},其中ki表示第i个目标环境的定位信息集合,x表示对应目标环境的定位信息元素。
7、优选的:所述步骤s2相机位移的计算过程为,通过对原始图像信息中特征点的旋转比较,进行相机位移的计算,然后对相机单位时间的位移进行累计积分得到相机在环境中的位移。
8、优选的:所述步骤s1依据导航信息,将车辆在目标环境的预定轨迹进行分段处理,并基于步骤s2获得的车辆在目标环境位移时的定位信息分段处理后的预定轨迹进行融合,进行车辆在目标环境的空间定位。
9、优选的:所述步骤s2以车辆进行目标环境前获得的最后一个坐标值作为相机的三维坐标系的原点。
10、优选的:所述步骤s3车辆在目标环境位移时的定位信息在计算之前,车辆在环境中的位移信息还需通过滤波器进行局部滤波处理。
11、优选的:所述分段处理后的预定轨迹的融合过程使用具有24维状态变量的误差模型。
12、优选的:所述误差模型中建立有姿态误差方程、速度误差方程、位置误差方程、陀螺漂移误差方程、加速度计偏置误差方程、里程计航向安装误差方程、里程计俯仰安装误差方程、里程计刻度系数误差方程、里程计杆臂误差方程、卫星接收机杆臂误差方程。
13、本发明相较于现有技术,其有益效果为:
14、本发明自动定义初始原点的方式,分别采用车辆环视相机原始图像信息,通过对视觉图像中特征点旋转比较,进行相机位移的计算,后对相机单位时间的位移进行累计积分得到相机在环境中的位移,由于相机在车辆上位置固定,即可得到车辆在环境中的位姿信息,即车辆视觉判断的车辆位移,利用车辆上具有高精度的参数信号(如轮速,加速度,转角等),进行车辆位置和姿态的定位,即车辆物理位移定位。融合车辆视觉判断的车辆位移和车辆物理信息判断的位移信息,对比一开始自动设置的原点,进行一定场景范围内的车辆精确定位。
技术特征:
1.车载定位信息管理方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的车载定位信息管理方法,其特征在于,所述步骤s2相机位移的计算过程为,通过对原始图像信息中特征点的旋转比较,进行相机位移的计算,然后对相机单位时间的位移进行累计积分得到相机在环境中的位移。
3.根据权利要求1所述的车载定位信息管理方法,其特征在于,所述步骤s1依据导航信息,将车辆在目标环境的预定轨迹进行分段处理,并基于步骤s2获得的车辆在目标环境位移时的定位信息分段处理后的预定轨迹进行融合,进行车辆在目标环境的空间定位。
4.根据权利要求1所述的车载定位信息管理方法,其特征在于,所述步骤s2以车辆进行目标环境前获得的最后一个坐标值作为相机的三维坐标系的原点。
5.根据权利要求1所述的车载定位信息管理方法,其特征在于,所述步骤s3车辆在目标环境位移时的定位信息在计算之前,车辆在环境中的位移信息还需通过滤波器进行局部滤波处理。
6.根据权利要求3所述的车载定位信息管理方法,其特征在于,所述分段处理后的预定轨迹的融合过程使用具有24维状态变量的误差模型。
7.根据权利要求6所述的车载定位信息管理方法,其特征在于,所述误差模型中建立有姿态误差方程、速度误差方程、位置误差方程、陀螺漂移误差方程、加速度计偏置误差方程、里程计航向安装误差方程、里程计俯仰安装误差方程、里程计刻度系数误差方程、里程计杆臂误差方程、卫星接收机杆臂误差方程。
技术总结
本发明涉及车载定位信息领域,车载定位信息管理方法,包括步骤S1,依据导航信息,获取车辆在目标环境的空间位置信息,所述目标环境为GPS信号强度小于预设值的环境;步骤S2,基于步骤S1的空间位置信息,获取车辆环视相机原始图像信息,并基于相机位移的计算从而获取车辆在环境中的位移信息;步骤S3,基于步骤S2的车辆在环境中的位移信息以及车辆在目标环境的空间位置信息,从而计算出车辆在目标环境位移时的定位信息;步骤S4,当GPS信号强度大于预设值恢复卫星定位时,向云端服务器发送步骤S3车辆在目标环境位移时的定位信息集合并储存,本发明便于在车辆进行信号较弱的环境中进行较高精度的定位。
技术研发人员:林宏政
受保护的技术使用者:南通宏芯科技有限公司
技术研发日:
技术公布日:2024/6/20
- 还没有人留言评论。精彩留言会获得点赞!