一种超声振动枪与机器人连接的减震和测力装置
本发明涉及机械与振动控制,具体的涉及一种超声振动枪与机器人连接的减震和测力装置。
背景技术:
1、机器人连接超声振动枪工作时,超声振动枪会受到来自工件的反作用力,,超声振动枪对机器人造成的冲击和振动会对机器人的精度和稳定性产生影响,会加剧零部件的磨损、紧固件的松弛,极大地减少机器人的使用寿命与加工效率。
2、现有技术中的减震器不能很好连接超声振动枪与机器人,超声冲击去应力的效果较差。
技术实现思路
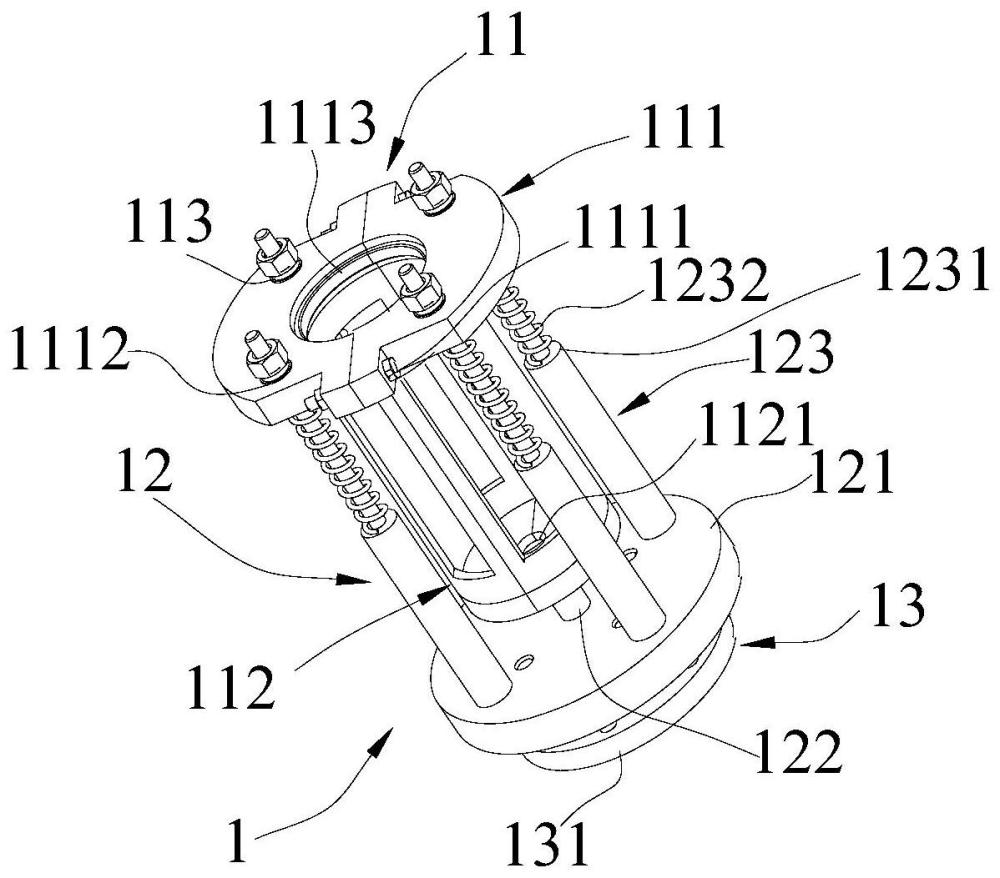
1、为了实现以上目的及其他目的,本发明是通过以下技术方案实现的:一种超声振动枪与机器人连接的减震和测力装置,所述超声振动枪通过所述装置与所述机器人连接,包括:夹枪单元,所述夹枪单元夹持所述超声振动枪;支承单元,所述支承单元与所述夹枪单元活动连接;转接单元,所述转接单元的前端与所述支承单元连接,后端与所述机器人连接;测量单元,所述测量单元安装在所述转接单元上,与所述支承单元连接。
2、在一实施例中,所述夹枪单元包括第一型腔、第二型腔和轴承,两个所述第一型腔互相固定连接,两个所述第二型腔互相固定连接,所述第二型腔的前端与所述第一型腔连接,所述轴承均布设置在所述第一型腔的端面。
3、在一实施例中,所述第一型腔的内侧设有凸台,所述凸台与所述超声振动枪上的凹槽契合。
4、在一实施例中,所述支承单元包括支承盘、第一导向柱、弹簧杆,所述支承盘的中心安装所述第一导向柱,所述第一导向柱的前端穿过所述第二型腔,所述第二型腔与所述第一导向柱相对滑动,所述支承盘上均布安装所述弹簧杆,所述弹簧杆的前端穿过所述轴承与所述第一型腔连接。
5、在一实施例中,所述弹簧杆的中间位置设有挡肩,弹簧套设在所述弹簧杆的前端,所述弹簧的前端抵住所述轴承,后端抵住所述挡肩。
6、在一实施例中,所述转接单元包括转接盘和第二导向柱,所述转接盘上均布设置所述第二导向柱,所述第二导向柱与所述支承盘固定连接,所述转接盘的后端与所述机器人连接。
7、在一实施例中,所述测量单元包括传感器,所述传感器为压力传感器,所述传感器安装在所述转接盘上,所述第一导向柱的后端穿过所述支承盘与所述传感器连接。
8、在一实施例中,所述转接盘的中心位置设有安装槽,所述传感器安装在所述安装槽内,所述转接盘上设有若干安装孔,所述机器人通过所述安装孔与所述转接盘连接。
9、由于上述技术方案运用,本发明与现有技术相比具有以下优点:发明能够将圆柱形超声振动枪连接安装在机器人末端执行器上,消除冲击加工过程中超声振动枪传递到机器人的高频振动,同时能够实时监测加工过程中的反作用力,为评估加工质量、优化加工工艺提供数据指导。
技术特征:
1.一种超声振动枪与机器人连接的减震和测力装置,所述超声振动枪通过所述装置与所述机器人连接,其特征在于,包括:
2.根据权利要求1所述的一种超声振动枪与机器人连接的减震和测力装置,其特征在于,所述夹枪单元包括第一型腔、第二型腔和轴承,两个所述第一型腔互相固定连接,两个所述第二型腔互相固定连接,所述第二型腔的前端与所述第一型腔连接,所述轴承均布设置在所述第一型腔的端面。
3.根据权利要求2所述的一种超声振动枪与机器人连接的减震和测力装置,其特征在于,所述第一型腔的内侧设有凸台,所述凸台与所述超声振动枪上的凹槽契合。
4.根据权利要求2所述的一种超声振动枪与机器人连接的减震和测力装置,其特征在于,所述支承单元包括支承盘、第一导向柱、弹簧杆,所述支承盘的中心安装所述第一导向柱,所述第一导向柱的前端穿过所述第二型腔,所述第二型腔与所述第一导向柱相对滑动,所述支承盘上均布安装所述弹簧杆,所述弹簧杆的前端穿过所述轴承与所述第一型腔连接。
5.根据权利要求4所述的一种超声振动枪与机器人连接的减震和测力装置,其特征在于,所述弹簧杆的中间位置设有挡肩,弹簧套设在所述弹簧杆的前端,所述弹簧的前端抵住所述轴承,后端抵住所述挡肩。
6.根据权利要求5所述的一种超声振动枪与机器人连接的减震和测力装置,其特征在于,所述转接单元包括转接盘和第二导向柱,所述转接盘上均布设置所述第二导向柱,所述第二导向柱与所述支承盘固定连接,所述转接盘的后端与所述机器人连接。
7.根据权利要求6所述的一种超声振动枪与机器人连接的减震和测力装置,其特征在于,所述测量单元包括传感器,所述传感器为压力传感器,所述传感器安装在所述转接盘上,所述第一导向柱的后端穿过所述支承盘与所述传感器连接。
8.根据权利要求7所述的一种超声振动枪与机器人连接的减震和测力装置,其特征在于,所述转接盘的中心位置设有安装槽,所述传感器安装在所述安装槽内,所述转接盘上设有若干安装孔,所述机器人通过所述安装孔与所述转接盘连接。
技术总结
本发明提供了一种超声振动枪与机器人连接的减震和测力装置,包括夹枪单元、支承单元、转接单元和测量单元,夹枪单元包括第一型腔、第二型腔和轴承,第一型腔和第二型腔互相连接,轴承嵌入安装在第一型腔的端面;支承单元包括支承盘、第一导向柱和弹簧杆,第一导向柱的前端穿过第二型腔,后端穿过支承盘与测量单元连接,弹簧杆的前端穿过轴承与夹枪单元连接,后端固定在支承盘上;转接单元包括转接盘和第二导向柱,第二导向柱两端分别连接转接盘和支承盘,转接盘上安装测量单元。本发明能够将圆柱形超声振动枪连接安装在机器人末端执行器上,消除冲击加工过程中超声振动枪传递到机器人的高频振动,同时能够实时监测加工过程中的反作用力。
技术研发人员:杨吟飞,刘全双,杨凯,王天明,仉恒毅,高立国,赖小明
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/6/5
- 还没有人留言评论。精彩留言会获得点赞!