一种大面积实现位置和力检测的柔性触觉传感器
本发明涉及柔性触觉传感器,尤其涉及一种大面积实现位置和力检测的柔性触觉传感器。
背景技术:
1、目前,在当前科技快速发展的环境下,柔性触觉传感器作为一种关键技术,受到了广泛的研究和关注。然而,传统小尺寸、局部感知的柔性传感器难以满足日益增长的大面积力位置和大小检测需求。尤其在工业、医疗和虚拟现实等领域,对于在大范围内实现高灵敏度的位置和力检测的要求日益显著。
2、现有柔性传感器在尺寸扩展、信号衰减、力分布不均匀等方面面临挑战,迫切需要一种新型柔性触觉传感器,能够在大面积上实现高精度的力位置和大小检测。
技术实现思路
1、本发明要解决上述现有技术存在的问题,提供一种大面积实现位置和力检测的柔性触觉传感器,在外力作用下,传感器电阻会发生变化的特性,从而有效检测作用在传感器上的外力大小和位置,其灵敏度高、稳定性强且具有结构简单、可塑性高和适应性强的优点。
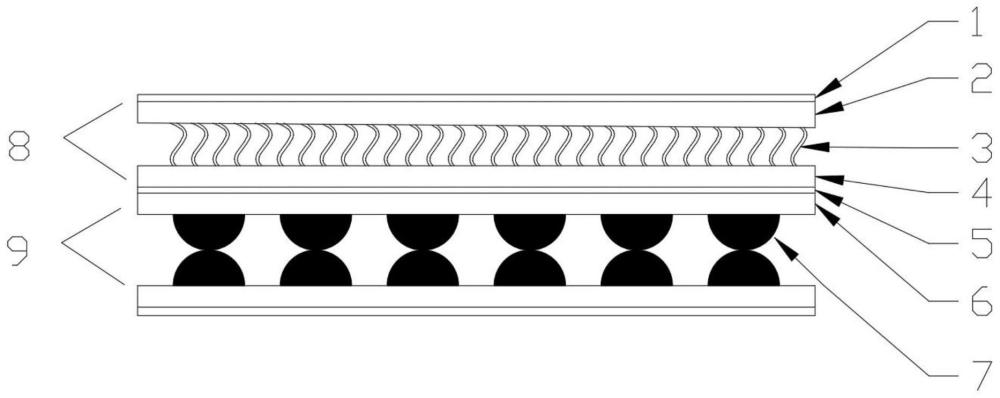
2、本发明解决其技术问题采用的技术方案:一种大面积实现位置和力检测的柔性触觉传感器,包括柔性传感器单元、导线和封装层,柔性传感器单元的外表面上覆盖封装层,柔性传感器单元通过导线与外部测量设备进行电性连接,其特征在于:所述柔性传感器单元包括上层的位置传感器功能布料、中间的绝缘层以及下层的压力传感器功能布料;
3、所述位置传感器功能布料包括上电极、纤维隔绝层和下电极,纤维隔绝层位于上电极和下电极之间,纤维隔绝层上设有镂空结构,当受到外力按压时,上电极发生形变并透过镂空结构与下电极相接触导通,自身电阻发生变化,进而外部测量设备通过检测导线输出的电信号得到准确的外力按压位置,实现传感器外力的位置检测;
4、所述压力传感器功能布料包括两片单面防滑导电布,两片单面防滑导电布之间设有至少两层相互接触的弹性导电微球结构;当受到外力按压时,两层弹性导电微球结构发生形变,接触面积增大,自身电阻减小,进而外部测量设备通过检测导线输出电信号得到压力的大小。
5、进一步完善,六条所述导线中的四条设于所述位置传感器功能布料的四侧边缘,记为l1-l4;两条设于压力传感器功能布料的两侧,记为l5-l6;
6、在l3和l4导线处施加恒流源,l3接正极,l4接负极,此时l3和l4侧可在上电极的两端形成等势面,电场线由l3指向l4,由电势分布构成x轴;同理在l1和l2导线处施加恒流源时,l2接正极,l1接负极,此时l2和l1侧可在下电极的两端形成等势面,电场线由l2指向l1,由电势分布构成y轴;
7、当位置传感器功能布料受到外力按压时,上电极和下电极相接触,在上电极和下电极处快速交替施加恒流源能够得到一个点的坐标值;如果上电极施加恒流源时下电极处不施加恒流源,通过采集l2处的电压,可以得出y轴坐标;如果上电极不施加恒流源时下电极处施加恒流源,上电极和下电极仍在接触,通过采集l3处的电压,可以得出x轴坐标;
8、在l5和l6导线处施加恒流源,l5接正极,l6接负极,当所述压力传感器功能布料受到外力按压时,弹性导电微球结构形状发生改变,接触面积增大,自身电阻减小,通过检测l5和l6两端的电压得到压力的大小。
9、进一步完善,所述位置传感器功能布料为真空夹层太空棉,纤维隔绝层为真空为弹力真空夹丝空气层,上电极和下电极为附有导电石墨烯的聚酰胺纤维。
10、进一步完善,所述单面防滑导电布为附有导电石墨烯的春亚纺底布。
11、进一步完善,所述弹性导电微球结构为附有导电石墨烯的半球形硅胶颗粒。
12、进一步完善,所述位置传感器功能布料和压力传感器功能布料上均具有附着的导电石墨烯作为导电材料,导电石墨烯由导电石墨烯油墨浸泡加热烘干附着形成。
13、进一步完善,所述位置传感器功能布料和压力传感器功能布料采用传感器织物结构制备而成,传感器织物结构包括导电面料和绝缘面料,制备导电面料的导电纱线材料采用镀银纤维、铜纤维、镀镍纤维或其混纺中的一种,制备绝缘面料的非导电纱线材料采用尼龙、棉线或其混纺的一种。
14、本发明有益的效果是:本发明的技术方案为人机交互、医疗康复和智能制造等领域提供了一种更为可靠和智能的解决方案,使得该领域的技术水平得以提升,具有显著的前瞻性和实际应用价值。本发明的创新点:①实现大面积柔性传感器位置和力检测,可用于机械臂或者机器人外皮肤;②制备工艺流程简单。
15、现有技术一般采用三维(3d)打印(cn202010803456.7一种柔性三维触觉传感器及其制作、检测方法)、模板(cn201610035590.0一种基于电容电阻复合式的全柔性触压觉传感器)或蚀刻或者采用化学试剂发生化学反应(cn202110909735.6一种双模柔性触觉传感器及其制备方法和应用)等柔性传感器制造方式,此类方法虽然能够实现获得的柔性压力传感器的好的灵敏度和一致性,但是受到复杂、耗时、高成本的制备工艺的限制。与之相比,本发明提供的大面积实现位置和力检测的柔性触觉传感器结构简单,大面积柔性传感器能够适应不规则表面和曲线形状,提高了其在各种环境中的适用性。可适用穿戴设备和人机交互界面的应用场景,例如机器人手指和人体关节等。
16、本发明提供的大面积实现位置和力检测的柔性触觉传感器,所采用原材料由市场购买防滑布、太空棉、石墨烯溶液,制作工艺简单,制作成本低,同时具有高的使用寿命,实用价值较高,无需额外的化学还原剂,大大简化了制作过程。
技术特征:
1.一种大面积实现位置和力检测的柔性触觉传感器,包括柔性传感器单元、导线和封装层,柔性传感器单元的外表面上覆盖封装层,柔性传感器单元通过导线与外部测量设备进行电性连接,其特征在于:所述柔性传感器单元包括上层的位置传感器功能布料、中间的绝缘层以及下层的压力传感器功能布料;
2.根据权利要求1所述的一种大面积实现位置和力检测的柔性触觉传感器,其特征在于:六条所述导线中的四条设于所述位置传感器功能布料的四侧边缘,记为l1-l4;两条设于压力传感器功能布料的两侧,记为l5-l6;
3.根据权利要求1所述的一种大面积实现位置和力检测的柔性触觉传感器,其特征在于:所述位置传感器功能布料为真空夹层太空棉,纤维隔绝层为真空为弹力真空夹丝空气层,上电极和下电极为附有导电石墨烯的聚酰胺纤维。
4.根据权利要求1所述的一种大面积实现位置和力检测的柔性触觉传感器,其特征在于:所述单面防滑导电布为附有导电石墨烯的春亚纺底布。
5.根据权利要求1所述的一种大面积实现位置和力检测的柔性触觉传感器,其特征在于:所述弹性导电微球结构为附有导电石墨烯的半球形硅胶颗粒。
6.根据权利要求1所述的一种大面积实现位置和力检测的柔性触觉传感器,其特征在于:所述位置传感器功能布料和压力传感器功能布料上均具有附着的导电石墨烯作为导电材料,导电石墨烯由导电石墨烯油墨浸泡加热烘干附着形成。
7.根据权利要求1所述的一种大面积实现位置和力检测的柔性触觉传感器,其特征在于:所述位置传感器功能布料和压力传感器功能布料采用传感器织物结构制备而成,传感器织物结构包括导电面料和绝缘面料,制备导电面料的导电纱线材料采用镀银纤维、铜纤维、镀镍纤维或其混纺中的一种,制备绝缘面料的非导电纱线材料采用尼龙、棉线或其混纺的一种。
技术总结
本发明公开一种大面积实现位置和力检测的柔性触觉传感器,包括柔性传感器单元、导线和封装层,柔性传感器单元的外表面上覆盖封装层,柔性传感器单元通过导线与外部测量设备进行电性连接,所述柔性传感器单元包括上层的位置传感器功能布料、中间的绝缘层以及下层的压力传感器功能布料;所述位置传感器功能布料包括上电极、纤维隔绝层和下电极,本发明提供的大面积实现位置和力检测的柔性触觉传感器,所以采用原材料由市场购买防滑布、太空棉、石墨烯溶液,制作工艺简单,制作成本低,同时具有高的使用寿命,实用价值较高,无需额外的化学还原剂,大大简化了制作过程。
技术研发人员:张友志,陈晓,李杭泽,马超林,陈锦苗,陈昌安
受保护的技术使用者:温州大学
技术研发日:
技术公布日:2024/6/30
- 还没有人留言评论。精彩留言会获得点赞!