水下线结构光测量工具的校正方法
本发明属于光学精密测量领域,具体涉及一种水下线结构光测量工具的校正方法。
背景技术:
1、线结构光系统用于水下成像时,往往需要被安装在密封的腔体内,相机通过具有一定厚度的玻璃拍摄水下图像。而水下拍摄到的图像会因为水、玻璃、空气等不同折射率的介质发生折射,给扫描出的点云带来非线性误差。目前多种水下线结构光测量中需要对系统进行水下标定,这种标定方法操作繁琐,且受环境因素影响较大,或忽视玻璃的折射作用导致测量精度降低。
技术实现思路
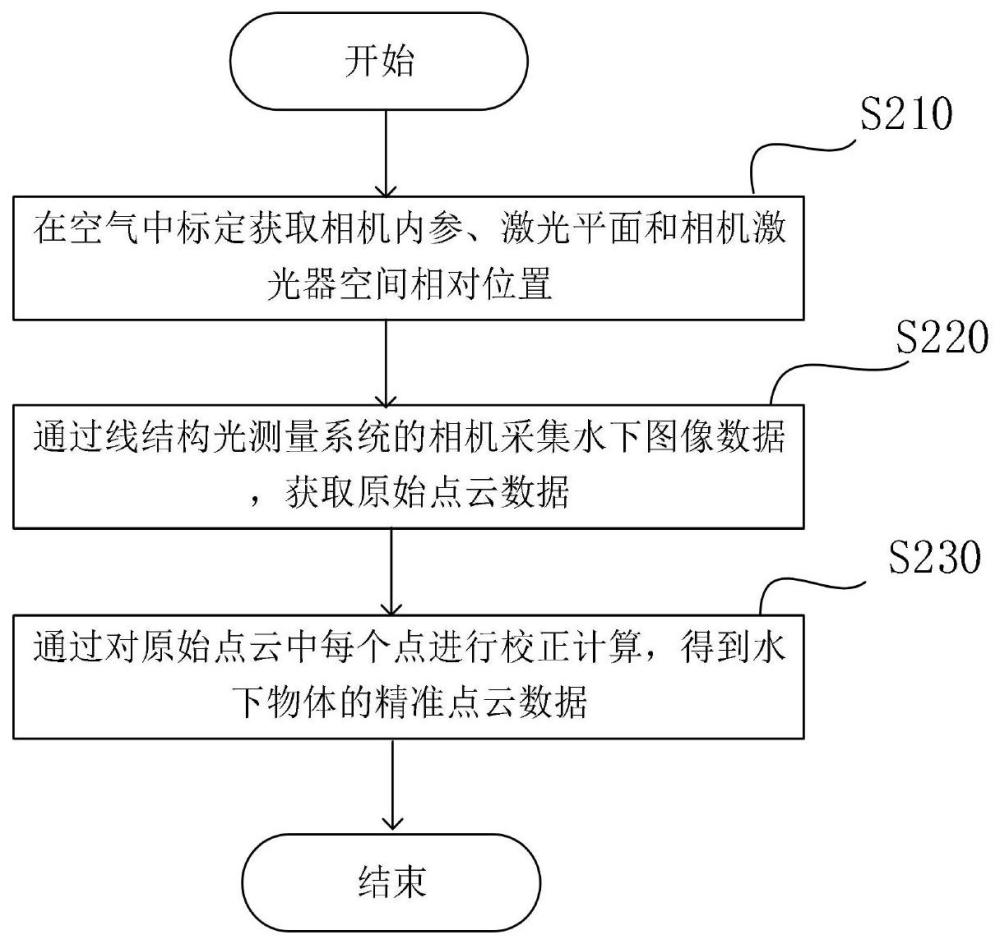
1、本发明目的旨在解决以上难题,提供一种水下线结构光测量工具的校正方法。水下线结构光测量工具包括相机、激光器、折射玻璃,该方法包括以下步骤:在空气中标定获取相机内参、激光平面和相机激光器空间相对位置,其中,相机内参包括相机的水平和垂直焦距、图像原点相对于相机光心的水平和垂直偏移量,激光平面指的是激光器发射出的线激光平面,相机激光器空间相对位置指的是激光器在相机坐标系下的坐标;通过线结构光测量系统的相机采集水下图像数据,获取原始点云数据;通过对原始点云中每个点进行校正计算,得到水下物体的精准点云数据。
2、在上述方法中,所述的通过对原始点云中每个点进行校正计算,得到水下物体的精准点云数据包括:
3、将斯涅尔定律应用至三维空间可得:
4、
5、其中,vi和vi+1表示入射向量和出射向量,ni和ni+1表示入射向量所在介质的折射率和出射向量所在介质的折射率,ni表示折射平面的单位法向量,与以上n1,2的关系是入射向量和出射向量均与法向量n1,2同向(平行),i是发生折射的平面,i和i+1表示入射和出射的光线关系;
6、由上式可以得到en和fm的空间矢量方程,其中p为光线折射后p’点在空间中的实际位置,e点为激光器l与p’点所在直线在折射玻璃第一平面的交点,f点为相机坐标系原点oc与p’点所在直线在所述第一平面的交点,n点为直线lp’经过所述第一平面发生折射后与折射玻璃第二平面的交点,m点为直线ocp’经过第一平面发生折射后与折射玻璃第二平面的交点:
7、
8、
9、其中,n1表示第一平面法向量,n2表示第二平面法向量,指的是相机坐标系下p’点坐标减去l点坐标得到的空间矢量的转置,指的是相机坐标系下p’点坐标减去oc点坐标得到的空间矢量的转置,xen、yen、zen指的是矢量在x,y,z的三个分量,xfm、yfm、zfm指的是矢量在x,y,z的三个分量,na、ng、nw分别为空气、玻璃和水的折射率;
10、由下式得到np和mp的空间矢量方程:
11、
12、
13、其中,指的是空间矢量的转置,指的是空间矢量的转置,xnp、ynp、znp指的是矢量在x,y,z的三个分量,xmp、ymp、zmp指的是矢量在x,y,z的三个分量;
14、由空间中点l和p’坐标,求出直线lp’和第一平面的交点坐标e(xe,ye,ze),计算出直线ocp’和第二平面的交点坐标f(xf,yf,zf)。
15、
16、
17、其中,(xl,yl,zl)指的是激光发射器在相机坐标系下的坐标l,xg、yg、zg指的是p'(xg,yg,zg),为相机坐标系下p’点坐标,x1、y1、z1指的相机坐标系原点oc(x1,y1,z1),z指的是:z方程组z-ds=0为第一平面在相机坐标系下的平面方程,ds指的是相机到第一平面的直线距离;
18、如下求得n点坐标:
19、(xn,yn,zn)=(xe+xen,ye+yen,ze+zen)
20、由n点坐标(xn,yn,zn)和方向向量npvnp=(xnp,ynp,znp)得到np的空间直线方程;
21、表示为矩阵形式为:
22、如下求得m点坐标:
23、(xm,ym,zm)=(xf+xfm,yf+yfm,zf+zfm)
24、由m点坐标(xm,ym,zm)和方向向量mpvmp=(xmp,ymp,zmp)得到mp的空间直线方程:
25、表示为矩阵形式为:
26、假设s和t为标量,则mn上任意点l0和np上任意点l1的坐标可以表示为:
27、
28、两条直线上任意两点之间距离的平方可以写成:
29、j=(l0-l1)2
30、=vmp2·s2+vnp2·t2-2vmp·vnp·s·t+2(m-n)·vmp·t-2(m-n)·vnp·t+(m-n)2
31、则j可以表示为s和t的函数:
32、j=f(s,t)
33、求s,t对j的偏导数,当偏导数为0时,j为最小值:
34、
35、由于方向矢量vmp和vnp为单位向量,因此vmp2=vnp2=1,代入上式得到:
36、
37、令c=vmp·vnp,d0=(n-m)·vmp,d1=(n-m)·vnp,代入上式得:
38、
39、得到s和t的值,便能够得到mp和np上最近的两个点p1和p2的坐标,这两个点的中点即为p点。
40、
41、最终如下得到p点坐标的计算公式:
42、
43、根据本发明技术方案,带来以下有益技术效果:可避免复杂的水下标定工作,考虑到玻璃和水介质对折射的影响,校正水下折射误差时,除了在深度方向进行校正外,对目标点三维空间中三个方向的坐标也进行校正。
技术特征:
1.一种水下线结构光测量工具的校正方法,水下线结构光测量工具包括相机、激光器、折射玻璃,其特征在于,包括以下步骤:
2.根据权利要求1所述的水下线结构光测量工具的校正方法,其特征在于,所述的通过对原始点云中每个点进行校正计算,得到水下物体的精准点云数据包括:
技术总结
本发明公开了一种水下线结构光测量工具的校正方法,水下线结构光测量工具包括相机、激光器、折射玻璃,包括以下步骤:在空气中标定获取相机内参、激光平面和相机激光器空间相对位置,其中,相机内参包括相机的水平和垂直焦距、图像原点相对于相机光心的水平和垂直偏移量,激光平面指的是激光器发射出的线激光平面,相机激光器空间相对位置指的是激光器在相机坐标系下的坐标;通过线结构光测量系统的相机采集水下图像数据,获取原始点云数据;通过对原始点云中每个点进行校正计算,得到水下物体的精准点云数据。使用该方法对水下物体进行测量,考虑了一定厚度玻璃和水介质折射率对测量的影响,可以获得水下物体的精确点云信息。
技术研发人员:冯常,李竞天,赵建平,蔡根,何胜波,吴国强,李翰儒,王东升,郭战岭
受保护的技术使用者:中国科学院光电技术研究所
技术研发日:
技术公布日:2024/6/26
- 还没有人留言评论。精彩留言会获得点赞!