一种桥梁水中结构物姿态定位方法和高差测量装置与流程
本申请涉及桥梁施工测量,特别涉及一种桥梁水中结构物姿态定位方法和高差测量装置。
背景技术:
1、桥梁水中结构物包括围堰、沉井等,是水中桥墩基础施工的重要施工设施,定位精度要求高,下沉姿态控制难度大。一般桥梁比如跨海长桥和连续梁结构的桥梁水中结构物数量多,其水中围堰、沉井等施工设施定位量大,对现场测量工作来说,是一个挑战。
2、相关技术中,传统采用全站仪或者gnss-rtk跟踪测量法,需要专门配备测量人员,跟踪下沉施工过程,经常对围堰、沉井等桥梁水中结构物观测,然后提供测量数据给施工人员,施工人员根据测量数据进行下沉姿态调整就位。这种测量定位方法存在施工和测量工作通过测量数据衔接,施工人员不能直观观测到桥梁水中结构物的姿态,造成“测量-调整-再测量-再调整”,周而复始,反反复复,工效低。
3、相关技术中,超千米级大跨径桥梁的巨型桥梁水中结构物如围堰、沉井等姿态测量定位,采用“bim平台、连续自动测量设备、多种传感器”的大平台可视化实时连续测量技术。这种测量定位方法,缺点是前期测量技术设备投入巨大,技术成本大,不适用于一般桥梁水中结构物测量定位。
4、可见相关技术存在工效低、成本大的缺陷,急待改善。
技术实现思路
1、本申请实施例提供一种桥梁水中结构物姿态定位方法和高差测量装置,以解决相关技术中需要配合测量人员现场跟踪指导,不能直观并准确的了解结构物姿态情况,在调节时需要反复进行测量和调整。
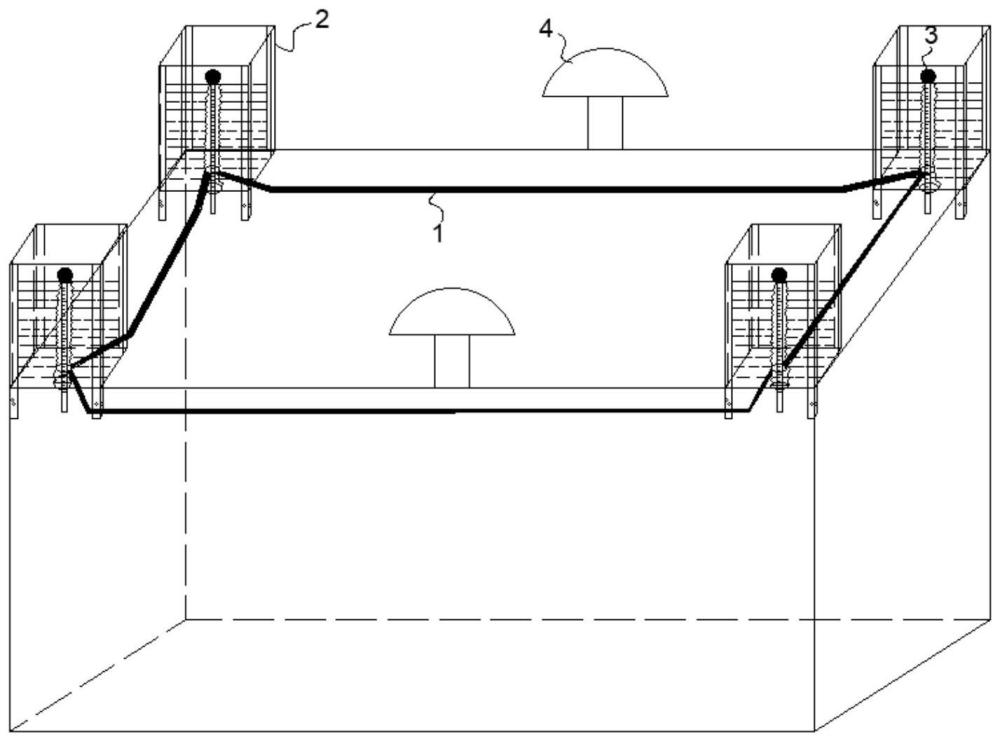
2、第一方面,提供了一种桥梁水中结构物高差测量装置,其包括:
3、多个测量单元,其分别用于设置在桥梁水中结构物顶部对应的测点上;相邻两个测量单元之间通过连通管连接;
4、其中,测量单元包括顶部开口底部密封的储液罐,储液罐内设有随液位上升,并用于测量测点相对高差的浮式倒立读数标尺。
5、一些实施例中,所述浮式倒立读数标尺包括:
6、竖向导管,其穿设所述储液罐的底壁,顶部连接有软管;软管的顶部密封连接有浮球;
7、倒立读数标尺,其一端与所述浮球连接,另一端依次穿设软管和竖向导管,竖向导管的内径与所述倒立读数标尺的外径相适配。
8、第二方面,提供了一种桥梁水中结构物姿态定位方法,其包括:
9、测量桥梁水中结构物中心点的绝对高程和其桥轴线位置处的实际坐标;
10、利用桥梁水中结构物高差测量装置获取桥梁水中结构物顶端的多个测点的高程观测值;
11、基于所述实际坐标对桥梁水中结构物桥轴线进行纠偏定位;
12、基于所述高程观测值和绝对高程,得出多个测点的实际绝对高程和绝对下沉量;然后基于设计规则、多个所述实际绝对高程和绝对下沉量进行纠偏桥梁水中结构物姿态。
13、一些实施例中,基于所述实际坐标对桥梁水中结构物桥轴线进行纠偏定位,包括以下步骤:
14、将桥梁水中结构物桥轴线的实际坐标与设计坐标进行比较,以得到对应的偏差;
15、根据所述偏差对桥梁水中结构物桥轴线进行纠偏定位。
16、一些实施例中,基于所述高程观测值和绝对高程,得出多个测点的实际绝对高程和绝对下沉量,包括以下步骤:
17、计算出多个高程观测值的平均值,以得到桥梁水中结构物中心点的相对高程,并将该相对高程作为桥梁水中结构物的相对高程基准;
18、计算出每个高程观测值与相对高程基准之间的相对高差,然后结合所述绝对高程和浮式倒立读数标尺的初始高程,以得到多个观测点的实际绝对高程和绝对下沉量。
19、一些实施例中,所述浮式倒立读数标尺包括:竖向导管,其穿设所述储液罐的底壁,顶部连接有软管;软管的顶部密封连接有浮球;倒立读数标尺,其一端与所述浮球连接,另一端依次穿设软管和竖向导管,竖向导管的内径与所述倒立读数标尺的外径相适配;
20、所述初始高程为所述竖向导管的顶口所在高程。
21、一些实施例中,结合所述相对高差、绝对高程和浮式倒立读数标尺的初始高程,以得到多个观测点的实际绝对高程和绝对下沉量,包括以下步骤:
22、根据桥梁水中结构中心点的绝对高程和所述相对高差,计算得出一个测点的实际绝对高程;
23、计算得出一个测点的浮式倒立读数标尺的初始高程与绝对高程之间的初始高差;将所述初始高差和相对高差做差,以得到该测点的实际高差;然后将该实际高差作为绝对下沉量;
24、重复上述步骤,以得到其他测点的实际绝对高程和绝对下沉量。
25、一些实施例中,基于设计规则和多个所述实际绝对高程进行纠偏桥梁水中结构物姿态,包括以下步骤:
26、将多个测点的实际绝对高程分别与其对应的理论绝对高程进行判断:
27、若多个实际绝对高程中数值最小的一个大于理论绝对高程,则以数值最小的实际绝对高程为参照基准,然后按照数值从大到小进行调整桥梁水中结构物各角处的河床,以纠偏其倾斜姿态,直到多个实际绝对高程中数值最小的一个等于理论绝对高程为止。
28、一些实施例中,在调整至后多个实际绝对高程中数值最小的一个等于理论绝对高程时,重新对测点进行观测,以得到新的高程观测值;
29、基于所述绝对高程和新的高程观测值,得出多个测点的实际绝对高程,然后基于设计规则和多个所述实际绝对高程进行纠偏桥梁水中结构物姿态的步骤,以完成检验操作。
30、一些实施例中,在桥梁水中结构物相对的两个外壁的桥轴线处上分别设有一台bds-rtk接收机,然后利用bds-rtk接收机测量桥梁水中结构物中心点的绝对高程和其桥轴线位置处的实际坐标。
31、本申请提供的技术方案带来的有益效果包括:
32、本申请实施例提供了一种桥梁水中结构物姿态定位方法和高差测量装置,由于在纠偏桥轴线位置和确定桥梁水中结构物中心点的绝对高程的基础上,利用桥梁水中结构物高差测量装置可以直观获取桥梁水中结构物顶端的多个测点的高程观测值;基于高程观测值和绝对高程,得出多个测点的实际绝对高程;然后基于设计规则和多个实际绝对高程进行纠偏桥梁水中结构物姿态。以上的过程充分借助桥梁水中结构物高差测量装置,施工人员可以直观观察水中结构物相对高差情况,并且通过设计的计算方式可以准确得出桥梁水中结构物的姿态,无需测量人员现场跟踪指导,即可及时纠偏姿态就位,所以大大提高定位精度和施工效率。
33、本发明的目的在于提供桥梁水中结构物姿态直观定位方法,桥梁水中结构物高差测量装置安装简单,操作方便,配合两台bds-rtk,解决了水中结构物测量定位难题,大大节约了测量定位技术成本,效益显著。
技术特征:
1.一种桥梁水中结构物高差测量装置,其特征在于,其包括:
2.如权利要求1所述的桥梁水中结构物高差测量装置,其特征在于,所述浮式倒立读数标尺(3)包括:
3.一种桥梁水中结构物姿态定位方法,其特征在于,其包括:
4.如权利要求3所述的桥梁水中结构物姿态定位方法,其特征在于,基于所述实际坐标对桥梁水中结构物桥轴线进行纠偏定位,包括以下步骤:
5.如权利要求3所述的桥梁水中结构物姿态定位方法,其特征在于,基于所述高程观测值和绝对高程,得出多个测点的实际绝对高程和绝对下沉量,包括以下步骤:
6.如权利要求5所述的桥梁水中结构物姿态定位方法,其特征在于:
7.如权利要求5所述的桥梁水中结构物姿态定位方法,其特征在于,结合所述相对高差、绝对高程和浮式倒立读数标尺(3)的初始高程,以得到多个观测点的实际绝对高程和绝对下沉量,包括以下步骤:
8.如权利要求3所述的桥梁水中结构物姿态定位方法,其特征在于,基于设计规则和多个所述实际绝对高程进行纠偏桥梁水中结构物姿态,包括以下步骤:
9.如权利要求8所述的桥梁水中结构物姿态定位方法,其特征在于:
10.如权利要求3所述的桥梁水中结构物姿态定位方法,其特征在于:
技术总结
本申请涉及一种桥梁水中结构物姿态定位方法和高差测量装置,由于在纠偏桥轴线位置和确定桥梁水中结构物中心点的绝对高程的基础上,利用桥梁水中结构物高差测量装置可以直观获取桥梁水中结构物顶端的多个测点的高程观测值;基于高程观测值和绝对高程,得出多个测点的实际绝对高程;然后基于设计规则和多个实际绝对高程进行纠偏桥梁水中结构物姿态。以上的过程充分借助桥梁水中结构物高差测量装置,施工人员可以直观观察水中结构物相对高差情况,并且通过设计的计算方式可以准确得出桥梁水中结构物的姿态,无需测量人员现场跟踪指导,即可及时纠偏姿态就位,提高定位精度和施工效率。解决了水中结构物测量定位难题,节约了测量定位技术成本。
技术研发人员:肖根旺,汪君,王金权,肖龙,刘建权,李付伟,夏晓亮,李明辉,胡在华,李鹏
受保护的技术使用者:中铁大桥局集团有限公司
技术研发日:
技术公布日:2024/7/23
- 还没有人留言评论。精彩留言会获得点赞!