一种检测车车辙标定计算方法与流程
本发明涉及路面检测,具体的,涉及一种检测车车辙标定计算方法。
背景技术:
1、目前,在基于激光断面仪法的路面车辙检测技术中,需要安装至少13个激光位移传感器进行测量。13个激光位移传感器采取共梁的方式安装,当车辆载重发生变化时,激光位移传感器的照射角度也会发生变化,采集的位移值也会随之改变,从而影响到采集的车辙值的准确性。
技术实现思路
1、为了解决上述通过采取共梁方式安装的激光位移传感器进行车辙检测时,车辆载重发生变化会影响到采集的车辙值的准确性的技术问题,本发明提供一种检测车车辙标定计算方法,通过在安装有十三个激光位移传感器的共梁上安装一个水平倾角传感器装置,当车辆载重发生变化时,记录载重变化前后的水平倾角的角度差值;在检测过程中,利用角度差重新计算每路激光位移传感器离地垂直高度,从而减少因载重发生变化带来的误差,提高车辙值的准确性。
2、本发明提供了一种检测车车辙标定计算方法,包括以下步骤:
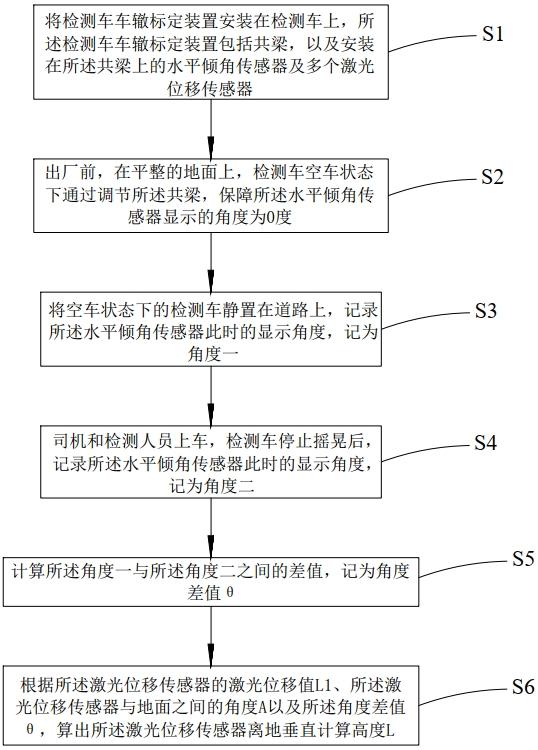
3、步骤一、将检测车车辙标定装置安装在检测车上,所述检测车车辙标定装置包括共梁,以及安装在所述共梁上的水平倾角传感器及多个激光位移传感器;
4、步骤二、出厂前,在平整的地面上,检测车空车状态下通过调节所述共梁,保障所述水平倾角传感器显示的角度为0度;
5、步骤三、将空车状态下的检测车静置在道路上,记录所述水平倾角传感器此时的显示角度,记为角度一;
6、步骤四、司机和检测人员上车,检测车停止摇晃后,记录所述水平倾角传感器此时的显示角度,记为角度二;
7、步骤五、计算所述角度一与所述角度二之间的差值,记为角度差值θ;
8、步骤六、根据所述激光位移传感器的激光位移值l1、安装时所述激光位移传感器的横截面与地面之间的角度a以及所述角度差值θ,算出所述激光位移传感器离地垂直计算高度l。
9、在本发明提供的检测车车辙标定计算方法的一种较佳实施例中,所述水平倾角传感器设于所述共梁顶部的中部;多个所述激光位移传感器对称间隔设置在所述共梁一侧的两端及底部,且位于所述共梁底部的所述激光位移传感器与地面垂直设置。
10、在本发明提供的检测车车辙标定计算方法的一种较佳实施例中,所述激光位移传感器为十三个,所述共梁的两端分别设有三个所述激光位移传感器,所述共梁的底部设有七个所述激光位移传感器。
11、在本发明提供的检测车车辙标定计算方法的一种较佳实施例中,当位于所述共梁底部的所述激光位移传感器与地面垂直时,此时,l = l1·cosθ。
12、在本发明提供的检测车车辙标定计算方法的一种较佳实施例中,当位于所述共梁底部的所述激光位移传感器与地面不垂直,且因载重变化扩大了所述激光位移传感器的横截面与地面之间的角度时,此时,l = l1·cos(a +θ)。
13、在本发明提供的检测车车辙标定计算方法的一种较佳实施例中,当位于所述共梁底部的所述激光位移传感器与地面不垂直,且因载重变化缩小了所述激光位移传感器的横截面与地面之间的角度时,此时,l = l1·cos(a -θ)。
14、相较于现有技术,本发明提供的检测车车辙标定计算方法具有以下有益效果:通过在安装有十三个激光位移传感器的共梁上安装一个水平倾角传感器装置,当车辆载重发生变化时,记录载重变化前后的水平倾角的角度差值;在检测过程中,利用角度差重新计算每路激光位移传感器离地垂直高度,从而减少因载重发生变化带来的误差,提高车辙值的准确性。
技术特征:
1.一种检测车车辙标定计算方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的检测车车辙标定计算方法,其特征在于,所述水平倾角传感器设于所述共梁顶部的中部;多个所述激光位移传感器对称间隔设置在所述共梁一侧的两端及底部,且位于所述共梁底部的所述激光位移传感器与地面垂直设置。
3.根据权利要求2所述的检测车车辙标定计算方法,其特征在于,所述激光位移传感器为十三个,所述共梁的两端分别设有三个所述激光位移传感器,所述共梁的底部设有七个所述激光位移传感器。
4.根据权利要求1所述的检测车车辙标定计算方法,其特征在于,当位于所述共梁底部的所述激光位移传感器与地面垂直时,此时,l = l1·cosθ。
5.根据权利要求1所述的检测车车辙标定计算方法,其特征在于,当位于所述共梁底部的所述激光位移传感器与地面不垂直,且因载重变化扩大了所述激光位移传感器的横截面与地面之间的角度时,此时,l = l1·cos(a +θ)。
6.根据权利要求1所述的检测车车辙标定计算方法,其特征在于,当位于所述共梁底部的所述激光位移传感器与地面不垂直,且因载重变化缩小了所述激光位移传感器的横截面与地面之间的角度时,此时,l = l1·cos(a -θ)。
技术总结
本发明公开了一种检测车车辙标定计算方法。所述检测车车辙标定计算方法包括:将检测车车辙标定装置安装在检测车上;检测车空车状态下通过调节水平倾角传感器为0度;将空车状态下的检测车静置在道路上,记录水平倾角传感器显示角度为角度一;司机和检测人员上车,记录水平倾角传感器显示角度为角度二;计算角度一与角度二之间的差值,记为θ;根据激光位移传感器的激光位移值L1、安装时激光位移传感器的横截面与地面之间的角度A以及θ,算出激光位移传感器离地垂直计算高度L。本发明提供一种检测车车辙标定计算方法,利用角度差重新计算每路激光位移传感器离地垂直高度,从而减少因载重发生变化带来的误差,提高车辙值的准确性。
技术研发人员:欧鹏,胡翌刚,肖滨,郭平
受保护的技术使用者:湖南绿道节能环保科技有限公司
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!