一种运输车路径规划方法、装置及设备与流程
本发明涉及计算机,尤其涉及一种运输车路径规划方法、装置及设备。
背景技术:
1、在大规模、高效率的工业化生产中,为提高货物出入库效率,目前很多大型仓库中都配备了智能仓储系统,通过智能仓储系统规划运输车的运动路径,以调度运输车按照规划好的运动路径完成运输货物的作业。
2、不过,一般大型仓库中环境都比较复杂,且运输车的作业流程繁琐,同一时间仓库中还会存在多个运输车共同运动,因此,如何对各个运输车进行路径规划,使之在不产生碰撞的前提下高效快速地运输货物,从而提升仓库在无人监管的情况下存储的安全性和稳定性,是工业应用亟待解决的关键问题。
3、基于此,本发明提出了一种运输车路径规划方法、装置及设备来解决上述技术问题。
技术实现思路
1、本发明描述了一种运输车路径规划方法、装置及设备,能够有效避免运输车在作业过程中产生碰撞,提升仓库在无人监管的情况下存储的安全性和稳定性。
2、根据第一方面,本发明提供了一种运输车路径规划方法,包括:
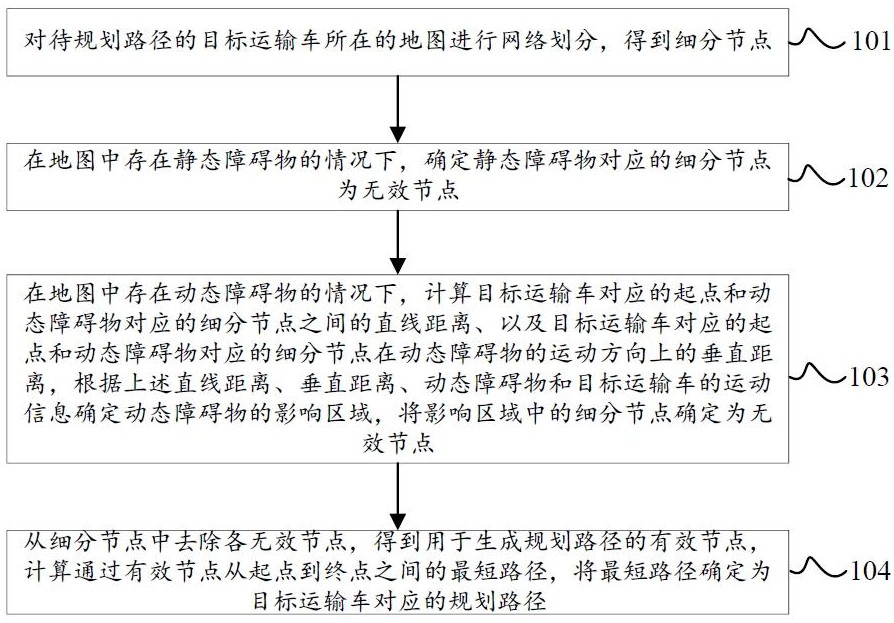
3、对待规划路径的目标运输车所在的地图进行网络划分,得到细分节点;所述细分节点包括所述目标运输车的起点和终点;
4、在所述地图中存在静态障碍物的情况下,确定所述静态障碍物对应的细分节点为无效节点;
5、在所述地图中存在动态障碍物的情况下,计算所述目标运输车对应的起点和所述动态障碍物对应的细分节点之间的直线距离、以及所述目标运输车对应的起点和所述动态障碍物对应的细分节点在所述动态障碍物的运动方向上的垂直距离,根据所述直线距离、所述垂直距离、所述动态障碍物和所述目标运输车的运动信息确定所述动态障碍物的影响区域,将所述影响区域中的细分节点确定为无效节点;
6、从所述细分节点中去除各无效节点,得到用于生成规划路径的有效节点,计算通过所述有效节点从所述起点到终点之间的最短路径,将所述最短路径确定为所述目标运输车对应的规划路径。
7、根据第二方面,本发明提供了一种运输车路径规划装置,包括:
8、地图划分单元,用于对待规划路径的目标运输车所在的地图进行网络划分,得到细分节点;所述细分节点包括所述目标运输车的起点和终点;
9、节点确定单元,用于在所述地图中存在静态障碍物的情况下,确定所述静态障碍物对应的细分节点为无效节点;在所述地图中存在动态障碍物的情况下,计算所述目标运输车对应的起点和所述动态障碍物对应的细分节点之间的直线距离、以及所述目标运输车对应的起点和所述动态障碍物对应的细分节点在所述动态障碍物的运动方向上的垂直距离,根据所述直线距离、所述垂直距离、所述动态障碍物和所述目标运输车的运动信息确定所述动态障碍物的影响区域,将所述影响区域中的细分节点确定为无效节点;
10、路径规划单元,用于从所述细分节点中去除各无效节点,得到用于生成规划路径的有效节点,计算通过所述有效节点从所述起点到终点之间的最短路径,将所述最短路径确定为所述目标运输车对应的规划路径。
11、根据第三方面,本发明提供了一种设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时,实现第一方面的方法。
12、根据本发明提供的运输车路径规划方法、装置及设备,在对目标运输车进行路径规划时,在地图中存在静态障碍物的情况下,将静态障碍物对应的细分节点确定为无效节点,在地图中存在动态障碍物的情况下,则通过计算所述目标运输车对应的起点和所述动态障碍物对应的细分节点之间的直线距离、以及所述目标运输车对应的起点和所述动态障碍物对应的细分节点在所述动态障碍物的运动方向上的垂直距离,根据所述直线距离、所述垂直距离、所述动态障碍物和所述目标运输车的运动信息确定所述动态障碍物的影响区域,将所述影响区域中的细分节点确定为无效节点,进而从地图的细分节点中去除各个可能会导致运输车发生碰撞事故的无效节点,得到用于生成规划路径的有效节点,从而依据有效节点生成目标运输车对应的规划路径,有效避免运输车在作业过程中产生碰撞,提升仓库在无人监管的情况下存储的安全性和稳定性。
技术特征:
1.一种运输车路径规划方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述影响区域包括头部区域、中部区域和尾部区域;
3.根据权利要求2所述的方法,其特征在于,所述根据所述尾部区域的中心坐标(cxend,cyend)和所述影响半径cdis,计算所述头部区域的中心坐标(cx0,cy0),和所述中部区域的中心坐标(cx2,cy2),包括:
4.根据权利要求2所述的方法,其特征在于,所述结合所述(cx0,cy0)、(cx2,cy2)、(cxend,cyend)和所述影响半径cdis,计算所述动态障碍物的影响区域,包括:
5.根据权利要求1所述的方法,其特征在于,所述从所述细分节点中去除各无效节点之前,所述方法还包括:
6.根据权利要求1所述的方法,其特征在于,所述计算通过所述有效节点从所述起点到终点之间的最短路径,包括:
7.根据权利要求1至6任一项所述的方法,其特征在于,所述细分节点之间的间距小于固定在所述地图中的静态障碍物之间的间距。
8.根据权利要求1至6任一项所述的方法,其特征在于,上下相邻的细分节点之间的间距和左右相邻的细分节点之间的间距不同。
9.一种运输车路径规划装置,其特征在于,包括:
10.一种设备,其特征在于,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时,实现如权利要求1-8中任一项所述的方法。
技术总结
本发明涉及计算机技术领域,尤其涉及一种运输车路径规划方法、装置及设备。在对目标运输车进行路径规划时,将静态障碍物对应的细分节点确定为无效节点,对于动态障碍物,则通过计算目标运输车的起点和动态障碍物之间的直线距离、以及目标运输车的起点和动态障碍物在动态障碍物的运动方向上的垂直距离,根据直线距离、垂直距离、动态障碍物和目标运输车的运动信息确定动态障碍物的影响区域,将影响区域中的细分节点确定为无效节点,进而从地图的细分节点中去除各个可能会导致运输车发生碰撞事故的无效节点,得到有效节点,依据有效节点生成规划路径,有效避免运输车在作业过程中产生碰撞,提升仓库在无人监管的情况下存储的安全性和稳定性。
技术研发人员:叶存健,张强,王洪刚,彭勇,王晓波,刘芳,唐小江,李思奇
受保护的技术使用者:中油管道物资装备有限公司
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!