探伤机器人的制作方法
本发明涉及电气维修,特别是涉及一种探伤机器人。
背景技术:
1、发电机在大修中需要定期抽穿转子以进行护环检修,需要将直径、长度及重量均较大的转子从定子中抽出,再由人员进入定子膛,进行一系列的检修和试验。因此,现有技术中的发动机检修方式耗费时间长、投入大量人力、及高风险作业容易损坏设备。
技术实现思路
1、基于此,有必要针对现有技术中的发动机检修方式耗费时间长、投入大量人力、及高风险作业容易损坏设备的问题,提供一种探伤机器人。
2、其技术方案如下:
3、一方面,提供了一种探伤机器人,包括:
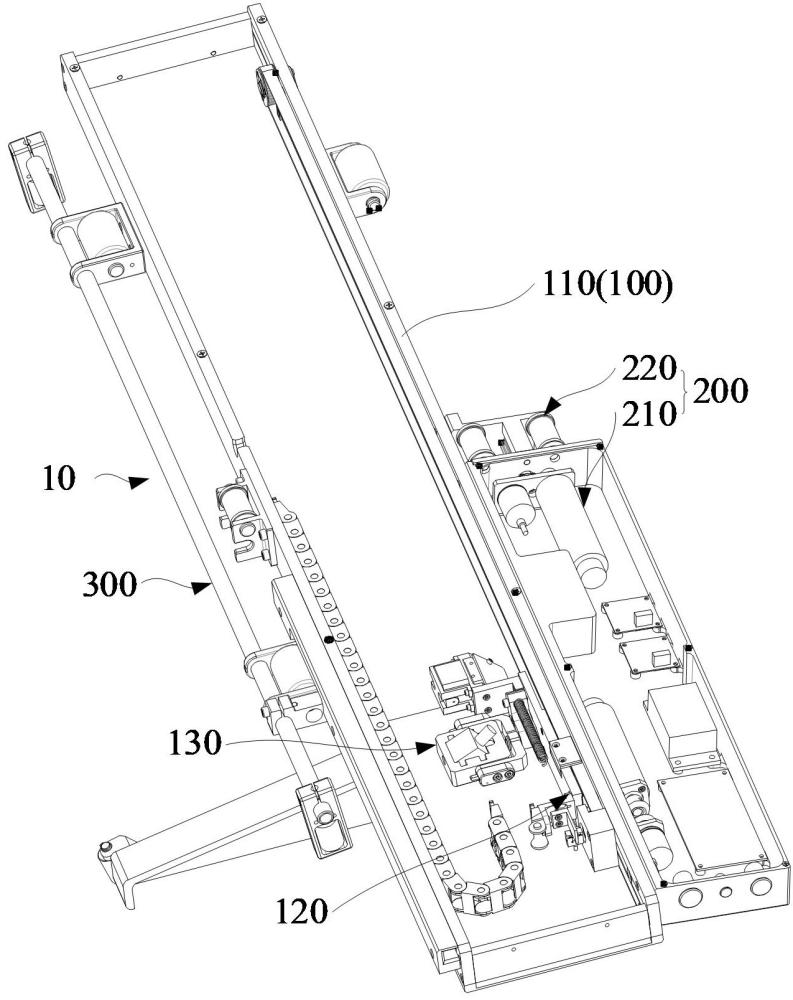
4、轴向运动机构,所述轴向运动机构包括安装本体、轴向驱动组件及探伤模块,所述轴向驱动组件及所述探伤模块均安装于所述安装本体上,所述轴向驱动组件与所述探伤模块传动连接,使得所述探伤模块能够沿待检测工件的轴线方向往复移动,所述安装本体用于与所述待检测工件滚动配合,所述探伤模块用于对所述待检测工件进行探伤;及
5、周向驱动机构,轴向驱动机构包括周向驱动组件、滚动组件及压紧件,所述压紧件套设于所述待检测工件的外侧壁,并用于将所述安装本体压紧在所述待检测工件上,所述滚动组件安装于所述安装本体上,并与所述压紧件滚动配合,所述周向驱动组件与所述滚动组件,使得所述滚动组件能够带动所述安装本体沿所述待检测工件的周向方向移动。
6、上述实施例中的探伤机器人,使用时,将探伤机器人与控制箱通信连接,使得探伤机器人进入发电机的待检测工件处进行工作,即轴向驱动组件驱动探伤模块按照预设指令沿待检测工件的轴线方向往复移动,周向驱动组件驱动滚动组件相对于压紧件滚动,以使滚动组件带动轴向运动机构沿待检测工件的周向方向移动,探伤模块按照预设指令沿待检测工件的周向方向往复移动,进而使得探伤模块对待检测工件的表面进行周向和轴向的二维扫描,从而实现对待检测工件进行探伤。相对于现有技术中的发动机检修方式,本申请中的探伤机器人具备在不抽出转子的状态下对发电机转子待检测工件进行自动探伤,节省抽穿转子的时间,降低对人力的需求,并避免转子在抽穿的过程中发生碰撞的风险,提高对待检测工件进行检修的效率及便利性的同时,降低对待检测工件进行检修的投入成本。
7、下面进一步对技术方案进行说明:
8、在其中一个实施例中,所述探伤机器人还包括防侧倾机构,所述防侧倾机构安装于所述安装本体上,并与所述待检测工件限位配合,以使所述探伤模块的移动方向与所述待检测工件的轴线方向保持平行。
9、在其中一个实施例中,所述防侧倾机构包括安装支架、第一限位轮及第二限位轮,所述安装支架固定于所述安装本体上,所述第一限位轮及所述第二限位轮均可转动安装于所述安装支架上,并分别与所述待检测工件的两个端面沿所述待检测工件的周向方向滚动配合。
10、在其中一个实施例中,所述第二限位轮为两个,两个所述第二限位轮间隔设置并均与所述待检测工件对应滚动配合。
11、在其中一个实施例中,所述探伤机器人还包括调节机构,所述压紧件设置为压紧同步带,所述压紧同步带动的两端均与所述调节机构连接,所述调节机构用于调节所述压紧同步带的松紧度。
12、在其中一个实施例中,所述调节机构包括调节本体、操作件、齿轮箱、传动组件及移动滑块,所述齿轮箱及所述传动组件均安装于所述移动滑块上,所述操作件与所述齿轮箱的输入轴传动连接,所述齿轮箱的输出轴与所述传动组件传动连接,所述移动滑块与所述传动组件传动连接,所述传动组件用于将旋转运动变换为直线运动,所述压紧同步带的两端分别为第一端及第二端,所述第一端固定于所述调节本体上,所述第二端固定于所述移动滑块上,所述移动滑块能够带动所述第二端沿靠近或远离所述第一端的方向往复移动,以调节所述压紧同步带的松紧度。
13、在其中一个实施例中,所述压紧件设置为压紧同步带,所述滚动组件包括同步轮,所述同步轮的外侧壁设有环形槽,所述压紧同步带与所述环形槽的底壁滚动配合,并与所述环形槽的两个内侧壁均限位配合。
14、在其中一个实施例中,所述安装本体设有沿所述待检测工件的轴线方向延伸的导轨,所述轴向驱动组件包括驱动电机、编码器、主动轮、从动轮、传动同步带及滑台,所述驱动电机与所述编码器及所述主动轮均传动连接,所述主动轮及所述从动轮间隔设置,并均与所述安装本体转动连接,所述传动同步带套设于所述主动轮及所述从动轮的外侧壁,所述传动同步带与滑台传动连接,所述滑台与所述导轨滑动配合,并与所述探伤模块传动连接。
15、在其中一个实施例中,所述轴向运动机构还包括零点开关,所述零点开关安装于所述滑台上,并用于对所述探伤模块在所述待检测工件上沿所述待检测工件的轴线方向的位置进行零点校对;
16、和/或,所述周向驱动机构还包括倾角仪,所述倾角仪安装于所述安装本体上,并用于对所述探伤模块在所述待检测工件上沿所述待检测工件的周向方向的位置进行零点校对。
17、在其中一个实施例中,所述探伤模块包括探伤支架及探伤件,所述探伤支架与所述轴向驱动组件传动连接,所述探伤件安装于所述探伤支架上,并用于对所述待检测工件的表面进行探伤。
技术特征:
1.一种探伤机器人,其特征在于,包括:
2.根据权利要求1所述的探伤机器人,其特征在于,所述探伤机器人还包括防侧倾机构,所述防侧倾机构安装于所述安装本体上,并与所述待检测工件限位配合,以使所述探伤模块的移动方向与所述待检测工件的轴线方向保持平行。
3.根据权利要求2所述的探伤机器人,其特征在于,所述防侧倾机构包括安装支架、第一限位轮及第二限位轮,所述安装支架固定于所述安装本体上,所述第一限位轮及所述第二限位轮均可转动安装于所述安装支架上,并分别与所述待检测工件的两个端面沿所述待检测工件的周向方向滚动配合。
4.根据权利要求3所述的探伤机器人,其特征在于,所述第二限位轮为两个,两个所述第二限位轮间隔设置并均与所述待检测工件对应滚动配合。
5.根据权利要求1至4任一项所述的探伤机器人,其特征在于,所述探伤机器人还包括调节机构,所述压紧件设置为压紧同步带,所述压紧同步带动的两端均与所述调节机构连接,所述调节机构用于调节所述压紧同步带的松紧度。
6.根据权利要求5所述的探伤机器人,其特征在于,所述调节机构包括调节本体、操作件、齿轮箱、传动组件及移动滑块,所述齿轮箱及所述传动组件均安装于所述移动滑块上,所述操作件与所述齿轮箱的输入轴传动连接,所述齿轮箱的输出轴与所述传动组件传动连接,所述移动滑块与所述传动组件传动连接,所述传动组件用于将旋转运动变换为直线运动,所述压紧同步带的两端分别为第一端及第二端,所述第一端固定于所述调节本体上,所述第二端固定于所述移动滑块上,所述移动滑块能够带动所述第二端沿靠近或远离所述第一端的方向往复移动,以调节所述压紧同步带的松紧度。
7.根据权利要求1至4任一项所述的探伤机器人,其特征在于,所述压紧件设置为压紧同步带,所述滚动组件包括同步轮,所述同步轮的外侧壁设有环形槽,所述压紧同步带与所述环形槽的底壁滚动配合,并与所述环形槽的两个内侧壁均限位配合。
8.根据权利要求1至4任一项所述的探伤机器人,其特征在于,所述安装本体设有沿所述待检测工件的轴线方向延伸的导轨,所述轴向驱动组件包括驱动电机、编码器、主动轮、从动轮、传动同步带及滑台,所述驱动电机与所述编码器及所述主动轮均传动连接,所述主动轮及所述从动轮间隔设置,并均与所述安装本体转动连接,所述传动同步带套设于所述主动轮及所述从动轮的外侧壁,所述传动同步带与滑台传动连接,所述滑台与所述导轨滑动配合,并与所述探伤模块传动连接。
9.根据权利要求8所述的探伤机器人,其特征在于,所述轴向运动机构还包括零点开关,所述零点开关安装于所述滑台上,并用于对所述探伤模块在所述待检测工件上沿所述待检测工件的轴线方向的位置进行零点校对;
10.根据权利要求1至4任一项所述的探伤机器人,其特征在于,所述探伤模块包括探伤支架及探伤件,所述探伤支架与所述轴向驱动组件传动连接,所述探伤件安装于所述探伤支架上,并用于对所述待检测工件的表面进行探伤。
技术总结
本发明提供一种探伤机器人,包括轴向运动机构及周向驱动机构。轴向运动机构包括安装本体、轴向驱动组件及探伤模块,轴向驱动组件及探伤模块均安装于安装本体上,轴向驱动组件与探伤模块传动连接,安装本体用于与待检测工件滚动配合,探伤模块用于对待检测工件进行探伤。轴向驱动机构包括周向驱动组件、滚动组件及压紧件,压紧件套设于待检测工件的外侧壁,并用于将安装本体压紧在待检测工件上,滚动组件安装于安装本体上,并与压紧件滚动配合,驱动组件与滚动组件。本申请中的探伤机器人具备在不抽出转子的状态下对发电机转子待检测工件进行自动探伤,节省抽穿转子的时间,降低对人力的需求,并避免转子在抽穿的过程中发生碰撞的风险。
技术研发人员:王建涛,陈志波,张闰,黄巍,邓长喜,陈威,梁平华,窦普,张志刚,赵建平,冯常,宋波,袁振亚,徐超,柳菲,陶攀,林琦,王凯,朱瑞,单福,王兵,杨建,王泽信,曹龙研,杨岱平
受保护的技术使用者:中广核核电运营有限公司
技术研发日:
技术公布日:2024/7/29
- 还没有人留言评论。精彩留言会获得点赞!