用于识别天线漂移的方法和装置以及雷达装置与流程
本发明涉及一种用于识别天线漂移的方法和装置以及一种雷达装置。
背景技术:
1、雷达传感器用在汽车领域中,用于求取机动车周围环境中的对象的距离、相对速度和角度范围。雷达传感器典型地包括具有用于发射雷达辐射的多个天线元件的天线阵列。在对象上反射的雷达辐射被接收并被分析评价,用于探测雷达目标。
2、由于结冰或下雪,雷达传感器可能被覆盖,这会影响雷达传感器的功能。其他影响可能由内部效应引起,例如由雷达传感器的构件的不同温度系数引起。在这种情况下可能会发生天线漂移,即相位改变、幅度改变或两者都改变。经由各种不同天线元件测量的信道的信号则不再符合所设置的相位和幅度关系。
3、天线漂移越大,所接收的用于角度估计的校准数据与当前测量情况就匹配越少,这可能导致角度值从不准确到完全不可靠。因此,对各个天线元件的幅度漂移和/或相位漂移的及早识别对于雷达传感器的运行意义重大。
4、de 199 45 268a1涉及一种用于在机动车中在用于自动纵向调节和/或横向调节的系统中进行状态识别的方法。为了确定系统的状态,可以考虑指标,特别是由系统在测量期间探测到的所有对象的总和。
技术实现思路
1、本发明提供一种用于识别天线漂移的方法和装置以及一种雷达装置。
2、优选实施方式构成进一步保护的主题。
3、因此,根据第一方面,本发明涉及一种用于识别雷达装置的天线阵列的天线元件的天线漂移的方法。雷达装置产生雷达测量数据。在使用对经由天线元件产生的雷达测量数据的傅立叶变换的情况下计算傅立叶变换数据。计算与傅立叶变换数据中的最大值相关的天线漂移指标。在使用计算出的天线漂移指标的情况下识别天线元件的天线漂移。
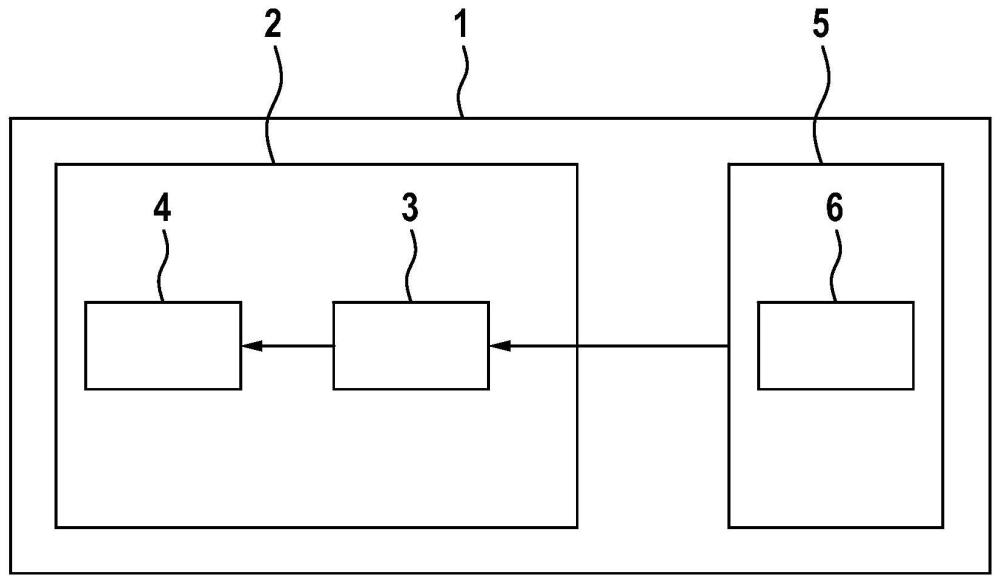
4、根据第二方面,本发明涉及一种用于识别雷达装置的天线阵列的天线元件的天线漂移的装置,该装置具有用于接收由雷达装置产生的雷达测量数据的接口。计算装置构造为用于使用对经由天线元件产生的雷达测量数据的傅立叶变换来计算傅立叶变换数据,计算与傅立叶变换数据中的最大值相关的天线漂移指标,并且在使用计算出的天线漂移指标的情况下识别天线元件的天线漂移。
5、根据第三方面,本发明涉及一种雷达装置,该雷达装置具有天线阵列以及根据第二方面的用于识别天线元件的天线漂移的装置,所述天线阵列具有多个天线元件。
6、本发明使得能够早期识别天线漂移,即天线元件的幅度漂移和/或相位漂移,例如在涂覆雷达装置时。漂移理解为相应值的(可能缓慢的)改变,例如振幅和/或相位。
7、在使用对经由天线元件产生的雷达测量数据的傅立叶变换的情况下获得的傅立叶变换数据包括局部最大值。理想情况下,该傅立叶变换数据的频谱中的每个局部最大值是具有相同距离和径向速度但具有不同角度的真实目标。然而,由于在分析评价雷达测量数据时使用的窗口,每个真实目标也会产生旁瓣。在理想的天线组件中,动态性能由所使用的窗口预給定。天线漂移无论起源如何都会破坏天线阵列的一致性并导致动态性能降低。在天线漂移对于角度估计来说还不危害的时候就已经可以观察到动态性能的显著降低。
8、因此,降低的动态性能或旁瓣抑制导致,在不进一步适配对傅立叶变换数据的分析评价的情况下探测到更多的目标。因此,通过使用天线漂移指标(该指标尤其可以与目标的数量相关),可以识别天线漂移。
9、根据用于识别天线阵列的天线元件的天线漂移的方法的一个实施方式,天线漂移指标的计算包括计算雷达目标探测的平均次数。雷达目标探测的平均次数尤其可以在不减小动态范围的情况下确定。
10、根据用于识别天线阵列的天线元件的天线漂移的方法的一个实施方式,借助傅立叶变换数据计算距离/速度谱中的雷达目标探测密度或每个探测到的距离/速度仓的目标的平均数量。
11、根据用于识别天线阵列的天线元件的天线漂移的方法的一个实施方式,为了计算天线漂移指标,确定傅立叶变换数据中从主最大值到最高的次最大值的距离。该参量也允许精确地确定天线漂移。
12、根据用于识别天线阵列的天线元件的天线漂移的方法的一个实施方式,在多个雷达周期上对天线漂移指标求平均。例如可以通过计算多个雷达周期上的指数平滑平均值来求平均。
13、根据用于识别天线阵列的天线元件的天线漂移的方法的一个实施方式,将计算出的用于识别天线元件的天线漂移的天线漂移指标与预给定的阈值进行比较。例如,如果天线漂移指标超过预给定的阈值,则识别到天线漂移。
14、根据用于识别天线阵列的天线元件的天线漂移的方法的一个实施方式,阈值与雷达传感器的环境条件相关。例如在穿过森林行驶时,由于可能的雷达目标数量较多,可以提高阈值。阈值还可以与总体求取的探测的次数或者与距离/速度谱中的探测到的距离/速度仓的局部密度相关。
15、根据用于识别天线阵列的天线元件的天线漂移的方法的一个实施方式,使用人工神经网络来执行天线元件的天线漂移的识别。例如,可能的附加属性或整个傅立叶变换数据可以用作神经网络的输入,即被输入到神经网络的输入层中。神经网络可能具有多个隐藏层以及一个输出层,该输出层输出发生天线漂移的概率。
16、根据用于识别天线阵列的天线元件的天线漂移的方法的一个实施方式,天线阵列是均匀线性阵列(英文:uniform linear array,ula),特别是完全占用的ula。
17、根据用于识别天线阵列的天线元件的天线漂移的方法的一个实施方式,天线阵列是多输入多输出阵列,特别是具有虚拟天线阵列。
18、根据用于识别天线阵列的天线元件的天线漂移的方法的一个实施方式,将天线漂移指标与根据现有技术的其他指标组合以识别天线漂移。由此可以更加稳健地进行识别。
19、本发明的进一步的优点、特征和细节从下面的说明书中得知,其中参考附图详细描述了不同的实施例。
技术特征:
1.一种用于识别雷达装置(1)的天线阵列(5)的天线元件(6)的天线漂移的方法,包括以下步骤:
2.根据权利要求1所述的方法,其中,所述天线漂移指标的计算包括计算雷达目标探测的平均数量。
3.根据权利要求2所述的方法,其中,借助傅立叶变换数据计算距离/速度谱中的雷达目标探测密度和/或每个探测到的距离/速度仓的平均目标数量。
4.根据前述权利要求之一所述的方法,其中,对所述天线漂移指标在多个雷达周期上求平均。
5.根据前述权利要求之一所述的方法,其中,将计算出的天线漂移指标与预给定的阈值进行比较以识别天线元件(6)的天线漂移。
6.根据权利要求5所述的方法,其中,所述阈值与所述雷达传感器的环境条件相关。
7.根据前述权利要求之一所述的方法,其中,使用人工神经网络进行所述天线元件(6)的天线漂移的识别。
8.根据前述权利要求之一所述的方法,其中,所述天线阵列(5)是均匀线性阵列。
9.用于识别雷达装置(1)的天线阵列(5)的天线元件(6)的天线漂移的装置(2),具有:
10.雷达装置(1),具有:
技术总结
本发明涉及一种用于识别雷达装置(1)的天线阵列(5)的天线元件(6)的天线漂移的方法。由雷达装置(1)产生雷达测量数据;使用对经由天线元件(6)产生的雷达测量数据的傅立叶变换来计算傅立叶变换数据;计算与傅立叶变换数据中的最大值相关的天线漂移指标;和使用计算出的天线漂移指标来识别天线元件(6)的天线漂移。本发明还涉及一种用于识别雷达装置(1)的天线阵列(5)的天线元件(6)的天线漂移的装置和一种相应的雷达装置。
技术研发人员:H·布登迪克,J·屈
受保护的技术使用者:罗伯特·博世有限公司
技术研发日:
技术公布日:2024/10/28
- 还没有人留言评论。精彩留言会获得点赞!