本发明涉及车辆定位,尤其涉及一种基于多传感器融合的位姿检测方法、装置、设备及介质。
背景技术:
1、汽车定位是让自动驾驶汽车知道自身确切位置,解决“我在哪儿”的问题,进而为自动驾驶汽车感知、路径规划及控制提供可靠的数据源。在自动驾驶领域,当前常见的定位技术有如下两种方法:(1)基于电子信号的定位(gnss等);(2)航迹推算(imu,wheelodometry);但是,基于gnss的定位方法是以一组卫星的伪距、星历等观测量,以及用户时钟差,实现车辆定位,但在隧道、遮挡等环境中效果较差。而基于航迹推算的定位方法依靠imu,根据上一时刻的位置和方位推断得到现在的位置和方位,imu刷新率高,但存在积分累计误差,从而导致车辆检测不准确的问题。
2、因此,急需提出一种基于多传感器融合的位姿检测方法、装置、设备及介质,解决现有技术中存在的电子信号的定位方法或航迹推算方法无法对车辆进行准确定位的技术问题。
技术实现思路
1、有鉴于此,有必要提供一种基于多传感器融合的位姿检测方法、装置、设备及介质,用以解决现有技术中存在的电子信号的定位方法或航迹推算方法无法对车辆进行准确定位的技术问题。
2、为了解决上述问题,本发明提供一种基于多传感器融合的位姿检测方法,包括:
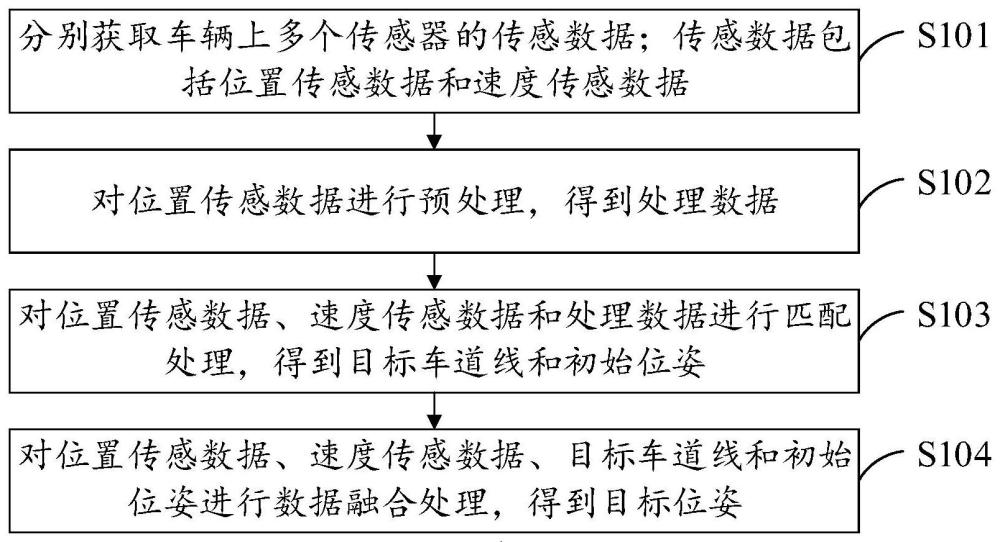
3、分别获取车辆上多个传感器的传感数据;所述传感数据包括位置传感数据和速度传感数据;
4、对所述位置传感数据进行预处理,得到处理数据;
5、对所述位置传感数据、所述速度传感数据和所述处理数据进行匹配处理,得到目标车道线和初始位姿;
6、对所述位置传感数据、所述速度传感数据、所述目标车道线和所述初始位姿进行数据融合处理,得到目标位姿。
7、在一种可能的实现方式中,所述位置传感数据包括相机车道线数据、组合惯导输出数据和高精度地图数据,所述对所述位置传感数据进行预处理,得到处理数据,包括:
8、对所述相机车道线数据进行车道线坐标转换,得到初始车道线数据;
9、对所述组合惯导输出数据和所述高精度地图数据进行坐标系转换,得到初始输出数据和初始地图数据;
10、根据所述初始输出数据对所述初始地图数据进行处理,得到目标地图数据;其中,所述处理数据包括所述初始车道线数据和所述目标地图数据。
11、在一种可能的实现方式中,所述位置传感数据包括车辆方向数据,所述速度传感数据包括轮速计数据,所述对所述位置传感数据、所述速度传感数据和所述处理数据进行匹配处理,得到目标车道线和初始位姿,包括:
12、基于预设算法对所述初始车道线数据和所述目标地图数据进行数据配准处理,得到目标车道线;
13、对所述轮速计数据和所述车辆方向数据进行处理,得到初始位姿。
14、在一种可能的实现方式中,所述预设算法为最近点迭代算法。
15、在一种可能的实现方式中,对所述组合惯导输出数据进行坐标系转换,得到初始输出数据,包括:
16、基于gps系统对所述组合惯导输出数据进行坐标系转换,得到初始输出数据;
17、在得到所述初始输出数据之后,还包括:
18、根据所述初始输出数据对所述基于gps系统的误差数据进行预处理。
19、在一种可能的实现方式中,在所述对所述位置传感数据、所述速度传感数据、所述目标车道线和所述初始位姿进行数据融合处理,得到目标位姿之前,还包括:
20、基于惯性测量单元对所述组合惯导输出数据进行预处理,从而对所述组合惯导输出数据进行更新。
21、在一种可能的实现方式中,所述对所述位置传感数据、所述速度传感数据、所述目标车道线和所述初始位姿进行数据融合处理,得到目标位姿,包括:
22、基于误差状态卡尔曼滤波器对所述组合惯导输出数据、所述轮速计数据、所述目标车道线和所述初始位姿进行数据融合处理,得到目标位姿。
23、第二方面,本发明还提供了一种基于多传感器融合的位姿检测装置,包括:
24、数据获取模块,用于分别获取车辆上每个传感器的传感数据;所述传感数据包括位置传感数据和速度传感数据;
25、数据处理模块,用于对所述位置传感数据进行预处理,得到处理数据;
26、数据匹配模块,用于对所述处理数据和所述速度传感数据进行匹配处理,得到目标车道线和初始位姿;
27、位姿优化模块,用于对所述目标车道线和所述初始位姿进行优化,得到目标位姿。
28、第三方面,本发明还提供了一种电子设备,包括存储器和处理器,其中,
29、存储器,用于存储程序;
30、处理器,与存储器耦合,用于执行存储器中存储的程序,以实现上述任一种实现方式中的基于多传感器融合的位姿检测方法中的步骤。
31、第四方面,本发明还提供了一种计算机可读存储介质,用于存储计算机可读取的程序或指令,程序或指令被处理器执行时,能够实现上述任一种实现方式中的基于多传感器融合的位姿检测方法中的步骤。
32、本发明的有益效果是:本发明通过获取车辆上多个传感器的传感数据,并对所有的传感数据进行处理,得到处理数据,进而可以对位置传感数据、速度传感数据和所述处理数据进行匹配处理,得到目标车道线和初始位姿,从而可以检测出车辆的目标车道线和初始位姿,为了可以得到更加准确的数据,还可以对位置传感数据、速度传感数据、目标车道线和初始位姿进行数据融合处理,从而可以得到车辆更加准确的目标位姿,解决了现有技术中存在的电子信号的定位方法或航迹推算方法无法对车辆进行准确定位的技术问题。
技术特征:1.一种基于多传感器融合的位姿检测方法,其特征在于,包括:
2.根据权利要求1所述的基于多传感器融合的位姿检测方法,其特征在于,所述位置传感数据包括相机车道线数据、组合惯导输出数据和高精度地图数据,所述对所述位置传感数据进行预处理,得到处理数据,包括:
3.根据权利要求2所述的基于多传感器融合的位姿检测方法,其特征在于,所述位置传感数据包括车辆方向数据,所述速度传感数据包括轮速计数据,所述对所述位置传感数据、所述速度传感数据和所述处理数据进行匹配处理,得到目标车道线和初始位姿,包括:
4.根据权利要求3所述的基于多传感器融合的位姿检测方法,其特征在于,所述预设算法为最近点迭代算法。
5.根据权利要求2所述的基于多传感器融合的位姿检测方法,其特征在于,对所述组合惯导输出数据进行坐标系转换,得到初始输出数据,包括:
6.根据权利要求3所述的基于多传感器融合的位姿检测方法,其特征在于,在所述对所述位置传感数据、所述速度传感数据、所述目标车道线和所述初始位姿进行数据融合处理,得到目标位姿之前,还包括:
7.根据权利要求3所述的基于多传感器融合的位姿检测方法,其特征在于,所述对所述位置传感数据、所述速度传感数据、所述目标车道线和所述初始位姿进行数据融合处理,得到目标位姿,包括:
8.一种基于多传感器融合的位姿检测装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括存储器和处理器,其中,
10.一种计算机可读存储介质,其特征在于,用于存储计算机可读取的程序或指令,所述程序或指令被处理器执行时,能够实现上述权利要求1至7中任一项所述基于多传感器融合的位姿检测方法中的步骤。
技术总结本发明涉及一种基于多传感器融合的位姿检测方法、装置、设备及介质,属于车辆定位技术领域,其中,该方法包括分别获取车辆上多个传感器的传感数据;所述传感数据包括位置传感数据和速度传感数据;对所述位置传感数据进行预处理,得到处理数据;对所述位置传感数据、所述速度传感数据和所述处理数据进行匹配处理,得到目标车道线和初始位姿;对所述位置传感数据、所述速度传感数据、所述目标车道线和所述初始位姿进行数据融合处理,得到目标位姿。解决了现有技术中存在的电子信号的定位方法或航迹推算方法无法对车辆进行准确定位的技术问题。
技术研发人员:刘杏,颜语忻,蒋登科,梁子湘
受保护的技术使用者:东风商用车有限公司
技术研发日:技术公布日:2024/8/20