一种双串耐张绝缘子零值智能检测装置及方法与流程
本申请涉及绝缘子智能检测,尤其涉及一种双串耐张绝缘子零值智能检测装置及方法。
背景技术:
1、架空输电线路耐张绝缘子主要用于导线与铁塔或其他支撑件结构之间连接,劣化的绝缘子其绝缘阻值减小,提前预防开展低值检测对于保证架空输电线路安全运行具有重要影响。传统的低值、零值检测方式为人工登塔进行高空带电作业,采用传统的火花间隙法和分布电压测量法,以及一些新型的检测方法如绝缘电阻测量法、工频耐压试验等。但随着高压等级的提高,耐张绝缘子串长度也在不断增加,人工检测作业的难度也变得越来越困难。
2、为了解决上述问题,存在:一种绝缘子零值检测机器人,采用履带模块行走,驱动控制盒控制履带模块与检测触针对绝缘子进行检测,但该装置在双串绝缘子上行走不便。另外存在:一种用于绝缘子检测机器人的低零值绝缘子检测方法,该方法通过搭建绝缘子检测的整体路模型;通过模型计算不同情况下绝缘子串的电压分布特性检测是否存在低、零值绝缘子及其位置。但该方法需要建立复杂模型计算,检测难度较高。
3、因此,亟需一种双串耐张绝缘子零值智能检测装置及方法,解决上述机器人在双串绝缘子上行走不便、需要建立复杂模型计算,检测难度较高的问题。
技术实现思路
1、针对现有技术的上述不足,本申请提供一种双串耐张绝缘子零值智能检测装置及方法,以解决现有的机器人在双串绝缘子上行走不便、需要建立复杂模型计算,检测难度较高的问题。
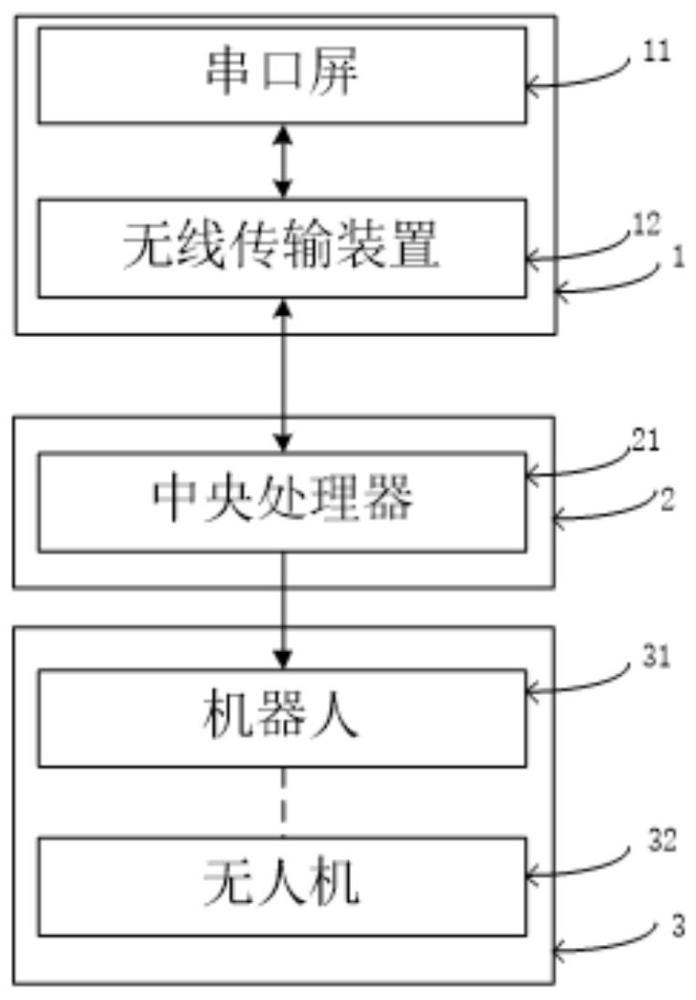
2、第一方面,本申请提供了一种双串耐张绝缘子零值智能检测装置,检测装置包括:操作模块、检测模块和传动模块;操作模块由串口屏和与串口屏对接的无线传输装置组成;检测模块由中央处理器组成;传动模块由无人机和机器人组成;其中,机器人包括:梯形支架,梯形支架顶部设置有供无人机挂载的柱形铁盘;梯形支架底部两侧各安装有驱动电机,且驱动电机设置有与梯形支架底部横轴垂直的旋转轴,且旋转轴两端分别安装有一组检测设备;其中,每组检测设备由与旋转轴固定的支撑板和固定在支撑板上的两个检测杆组成;梯形支架底部还固定有挡板,且挡板上固定有电源、中央处理器和无线传输装置;其中,中央处理器分别与驱动电机、无线传输装置、检测杆和电源相连。
3、进一步地,支撑板为长度可伸缩固定的结构,用于调节支撑板两端检测杆之间的距离。
4、进一步地,检测杆为长度可伸缩固定的结构。
5、进一步地,驱动电机采用凸字槽螺丝固定在梯形支架底部。
6、进一步地,无人机设置有延长杆、伞形罩、失电电磁铁。
7、进一步地,电源设置有电源开关;无线传输装置设置有远程控制开关。
8、第二方面,本申请提供了一种双串耐张绝缘子零值智能检测方法,用于双串耐张绝缘子零值智能检测装置,方法包括:通过无人机,将机器人放置在两串耐张绝缘子的中间,且机器人梯形支架两侧的检测杆分别放置在绝缘子之间的钢帽处;在完成机器人的放置后,无人机脱离机器人;通过操作模块中的串口屏,触发检测指令;通过机器人上的无线传输装置将检测指令传输至中央处理器,进而通过中央处理器获取检测杆采集到的电压值;中央处理器通过无线传输装置将电压值发送至串口屏;通过串口屏,触发移动指令;通过机器人上的无线传输装置将移动指令传输至中央处理器,进而通过中央处理器控制驱动电机运行;以使驱动电机通过旋转旋转轴带动支撑板,进而通过支撑板带动检测杆翻转,以达到机器人行进的功能。
9、进一步地,在通过无人机,将机器人放置在两串耐张绝缘子的中间之前,方法还包括:获取每串耐张绝缘子中两个相邻钢帽的实际距离;基于实际距离与支撑板长度之间的预设关系,确定支撑板的具体长度,以使支撑板两端的检测杆位于同一绝缘子两端的钢帽处,且支撑板长度能够使检测杆翻越绝缘子。
10、进一步地,在通过无人机,将机器人放置在两串耐张绝缘子的中间之前,方法还包括:获取两串耐张绝缘子之间的测量距离;基于测量距离与检测杆长度之间的预设关系,确定检测杆的具体长度。
11、进一步地,在通过支撑板带动检测杆翻转,以达到行进的功能之后,方法还包括:在确定完成当前双串耐张绝缘子的检测后,通过无人机中的失电电磁铁扣住机器人顶部柱形铁盘,进而通过无人机将机器人放置在下一串耐张绝缘子上。
12、本领域技术人员能够理解的是,本申请至少具有如下有益效果:
13、(1)适用于架空输电线路双串耐张绝缘子检测,也适用于变电站内龙门架上耐张串零值检测,装置可以行走双串空隙。(2)自由度多向可调。针对不同的耐张串型号、不同的绝缘子间距,不同的电压等级线路的双串间隙均适用。本发明检测杆铜针自由伸缩可保证装置适用于各种大小耐张绝缘子,支撑板也可长短伸缩,针对绝缘子间隙不同问题,也能调整支撑板实现翻越行走。(3)四组检测杆在行进检测过程中,同一侧绝缘子可分别被两组检测杆计检测,双检测模式避免单一检测杆故障造成检测不灵敏问题。(4)无人机挂载的机器人不用人工登塔进行换位,避免人工登塔效率低、更换位置时间长问题。(5)无人机挂载结构安全高效,失电电磁铁能在无电情况下快速吸附机器人,升空运输到高空绝缘子位置,通电后失磁,实现无人机和机器人脱离,相比带电磁吸安全性好,即使没电也能确保空中运输安全,且节省电量。伞形罩可以确保无人机电磁铁在空中快速对接柱形铁盘,减轻无人机对准的难度。另一方面,4组检测杆同时开展4片绝缘子检测,相比现有的检测设备通过两足(两个支撑部件作为行走足)检测,提高了效率。解决了现有的机器人在双串绝缘子上行走不便、需要建立复杂模型计算,检测难度较高的问题。
技术特征:
1.一种双串耐张绝缘子零值智能检测装置,其特征在于,所述检测装置包括:操作模块、检测模块和传动模块;
2.根据权利要求1所述的双串耐张绝缘子零值智能检测装置,其特征在于,
3.根据权利要求1所述的双串耐张绝缘子零值智能检测装置,其特征在于,
4.根据权利要求1所述的双串耐张绝缘子零值智能检测装置,其特征在于,
5.根据权利要求1所述的双串耐张绝缘子零值智能检测装置,其特征在于,无人机设置有延长杆、伞形罩、失电电磁铁。
6.根据权利要求1所述的双串耐张绝缘子零值智能检测装置,其特征在于,电源设置有电源开关;无线传输装置设置有远程控制开关。
7.一种双串耐张绝缘子零值智能检测方法,用于权利要求1所述的双串耐张绝缘子零值智能检测装置,其特征在于,所述方法包括:
8.根据权利要求7所述的双串耐张绝缘子零值智能检测方法,其特征在于,在通过无人机,将机器人放置在两串耐张绝缘子的中间之前,所述方法还包括:
9.根据权利要求7所述的双串耐张绝缘子零值智能检测方法,其特征在于,在通过无人机,将机器人放置在两串耐张绝缘子的中间之前,所述方法还包括:
10.根据权利要求7所述的双串耐张绝缘子零值智能检测方法,其特征在于,在通过支撑板带动检测杆翻转,以达到行进的功能之后,所述方法还包括:
技术总结
本申请公开了一种双串耐张绝缘子零值智能检测装置及方法,主要涉及绝缘子检测技术领域,用以解决现有的机器人在双串绝缘子上行走不便、需要建立复杂模型计算,检测难度较高的问题。包括:操作模块由串口屏和与串口屏对接的无线传输装置组成;传动模块由无人机和机器人组成;其中,机器人包括:梯形支架,梯形支架顶部设置有供无人机挂载的柱形铁盘;梯形支架底部两侧各安装有驱动电机,且驱动电机设置有与梯形支架底部横轴垂直的旋转轴,且旋转轴两端分别安装有一组检测设备;其中,每组检测设备由与旋转轴固定的支撑板和固定在支撑板上的两个检测杆组成;梯形支架底部还固定有挡板,且挡板上固定有电源、中央处理器和无线传输装置。
技术研发人员:柳岩妮,郑玉浩,张永峰,郝英欣,王虎,丁心,于世香
受保护的技术使用者:国网山东省电力公司潍坊市寒亭区供电公司
技术研发日:
技术公布日:2024/5/29
- 还没有人留言评论。精彩留言会获得点赞!