基于GPS和关键点位关系的自主巡检动态规划方法及系统与流程
本发明涉及输电线路巡检,尤其涉及一种基于gps和关键点位关系的自主巡检动态规划方法、系统、装置和存储介质。
背景技术:
1、巡检成果的时效性、安全性、准确性是人巡时代长期困扰电网运维部门的难题。近些年,无人机作为一种高科技的巡检利器在电网行业中得到迅速推广与应用。
2、无人机沿线路飞行,并同步拍照或者激光扫描,结合数据处理软件,可以快速、准确地发掘线路中的隐患缺陷。
3、但是在巡检过程中,巡检路线的规划会影响巡检质量和无人机的滞空时间,尤其是在对杆塔上重点巡检位置进行巡检时,由于巡检点比较多,会导致无人机巡检路径过多的重复交叉,从而造成电能的浪费降低滞空时间。
技术实现思路
1、本发明主要解决的技术问题是提供一种基于gps和关键点位关系的自主巡检动态规划方法及系统,通过gps和关键点位相结合,实现在巡检过程中能够根据关键巡检点自动规划最优巡检路径,保证巡检质量的同时还降低能耗延长滞空时间。
2、为解决上述技术问题,本发明采用的一个技术方案是:提供一种基于gps和关键点位关系的自主巡检动态规划方法,其特征在于:包括以下步骤:
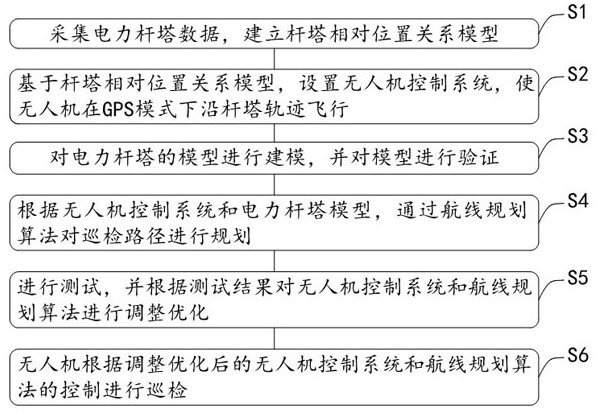
3、步骤一、采集电力杆塔数据,建立杆塔相对位置关系模型;
4、步骤二、基于杆塔相对位置关系模型,设置无人机控制系统,使无人机在gps模式下沿杆塔轨迹飞行;
5、步骤三、对电力杆塔的模型进行建模,并对模型进行验证;
6、步骤四、根据无人机控制系统和电力杆塔模型,通过航线规划算法对巡检路径进行规划;
7、步骤五、进行测试,并根据测试结果对无人机控制系统和航线规划算法进行调整优化;
8、步骤六、无人机根据调整优化后的无人机控制系统和航线规划算法的控制进行巡检。
9、进一步的,所述步骤一中,利用相机和雷达传感技术对电力杆塔的数据进行采集,电力杆塔的数据包括杆塔之间的距离、方位角、海拔高度。
10、进一步的,所述步骤二中,无人机控制系统为:通过gps对无人机进行定位并与后台控制终端进行信息通讯,并控制无人机进行飞行。
11、进一步的,所述步骤三中,对模型进行验证的过程为:根据电力杆塔模型的属性和位置信息,与无人机上携带的传感器的测量结果进行比对。
12、进一步的,所述步骤四中,航线规划算法为:根据已知的杆塔位置关系和无人机当前位置,自动计算出下一个飞行目标点的位置和路径,并进行动态调整。
13、进一步的,所述步骤四中,进行规划的方式为:人工标记电力杆塔的关键巡检点,然后航线规划算法对标记的关键巡检点和无人机控制系统形成的巡检轨迹进行融合,规划出最优巡检路径。
14、进一步的,所述步骤五中,进行调整优化的方式为:对输电线路进行人工巡检,获取杆塔的数据,并根据杆塔上的关键巡检点规划第一最优巡检路径,然后对该输电线路进行无人机自主巡检获得第二最优巡检路径,对第一最优巡检路径和第二最优巡检路径进行对比,从而确定两条巡检路径的差别,以此对无人机控制系统和航线规划算法进行调整优化。
15、为解决上述技术问题,本发明采用的一个技术方案是:提供一种基于gps和关键点位关系的自主巡检动态规划系统,其特征在于:包括数据采集模块、模型构建模块、自主巡检模块和调整优化模块,其中:
16、数据采集模块:利用相机和雷达传感技术对电力杆塔的数据进行采集;
17、模型构建模块:采集电力杆塔数据,建立杆塔相对位置关系模型;对电力杆塔的模型进行建模,并对模型进行验证;
18、调整优化模块:基于杆塔相对位置关系模型,设置无人机控制系统,使无人机在gps模式下沿杆塔轨迹飞行;根据无人机控制系统和电力杆塔模型,通过航线规划算法对巡检路径进行规划;进行测试,并根据测试结果对无人机控制系统和航线规划算法进行调整优化;
19、自主巡检模块:无人机根据调整优化后的无人机控制系统和航线规划算法的控制进行巡检。
20、为解决上述技术问题,本发明采用的一个技术方案是:提供一种基于gps和关键点位关系的自主巡检动态规划装置,其特征在于,包括:
21、存储器,用于存储计算机程序;
22、处理器,用于读取并执行所述存储器中存储的所述计算机程序,当所述计算机程序被执行时,所述处理器执行如上述所述任一项所述的基于gps和关键点位关系的自主巡检动态规划方法。
23、为解决上述技术问题,本发明采用的一个技术方案是:提供一种计算机可读存储介质,其特征在于:所述计算机可读存储介质中存储有指令,当所述计算机指令在计算机上运行时,使得所述计算机执行如上述所述任一项所述的基于gps和关键点位关系的自主巡检动态规划方法。
24、本发明的有益效果是:本发明通过gps和关键点位相结合,实现在巡检过程中能够根据关键巡检点自动规划最优巡检路径,保证巡检质量的同时还降低能耗延长滞空时间。
25、为了让本申请的上述和其他目的、特征和优点更能明显易懂,下文特举较佳实施例,并配合所附图示,做详细说明如下。
技术特征:
1.一种基于gps和关键点位关系的自主巡检动态规划方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的基于gps和关键点位关系的自主巡检动态规划方法,其特征在于:所述步骤一中,利用相机和雷达传感技术对电力杆塔的数据进行采集,电力杆塔的数据包括杆塔之间的距离、方位角、海拔高度。
3.根据权利要求1所述的基于gps和关键点位关系的自主巡检动态规划方法,其特征在于:所述步骤二中,无人机控制系统为:通过gps对无人机进行定位并与后台控制终端进行信息通讯,并控制无人机进行飞行。
4.根据权利要求1所述的基于gps和关键点位关系的自主巡检动态规划方法,其特征在于:所述步骤三中,对模型进行验证的过程为:根据电力杆塔模型的属性和位置信息,与无人机上携带的传感器的测量结果进行比对。
5.根据权利要求1所述的基于gps和关键点位关系的自主巡检动态规划方法,其特征在于:所述步骤四中,航线规划算法为:根据已知的杆塔位置关系和无人机当前位置,自动计算出下一个飞行目标点的位置和路径,并进行动态调整。
6.根据权利要求1所述的基于gps和关键点位关系的自主巡检动态规划方法,其特征在于:所述步骤四中,进行规划的方式为:人工标记电力杆塔的关键巡检点,然后航线规划算法对标记的关键巡检点和无人机控制系统形成的巡检轨迹进行融合,规划出最优巡检路径。
7.根据权利要求1所述的基于gps和关键点位关系的自主巡检动态规划方法,其特征在于:所述步骤五中,进行调整优化的方式为:对输电线路进行人工巡检,获取杆塔的数据,并根据杆塔上的关键巡检点规划第一最优巡检路径,然后对该输电线路进行无人机自主巡检获得第二最优巡检路径,对第一最优巡检路径和第二最优巡检路径进行对比,从而确定两条巡检路径的差别,以此对无人机控制系统和航线规划算法进行调整优化。
8.一种基于gps和关键点位关系的自主巡检动态规划系统,其特征在于:包括数据采集模块、模型构建模块、自主巡检模块和调整优化模块,其中:
9.一种基于gps和关键点位关系的自主巡检动态规划装置,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于:所述计算机可读存储介质中存储有指令,当所述计算机指令在计算机上运行时,使得所述计算机执行如权利要求1-7中任一项所述的基于gps和关键点位关系的自主巡检动态规划方法。
技术总结
本发明公开了一种基于GPS和关键点位关系的自主巡检动态规划方法及系统,采集电力杆塔数据,建立杆塔相对位置关系模型;基于杆塔相对位置关系模型,设置无人机控制系统,使无人机在GPS模式下沿杆塔轨迹飞行;对电力杆塔的模型进行建模,并对模型进行验证;根据无人机控制系统和电力杆塔模型,通过航线规划算法对巡检路径进行规划;进行测试,并根据测试结果对无人机控制系统和航线规划算法进行调整优化;无人机根据调整优化后的无人机控制系统和航线规划算法的控制进行巡检;本发明通过GPS和关键点位相结合,实现在巡检过程中能够根据关键巡检点自动规划最优巡检路径,保证巡检质量的同时还降低能耗延长滞空时间。
技术研发人员:田杨阳,蒋炜,郭志民,王棨,薛飞,小布穷,毛泰奇,李予全,李哲,张伟剑,曾凡明,毛万登,万迪明,杨益,张璐,庞锴,吴博,张龙,胡军星,史建利,姜亮,郑伟,陈岑,胡誉蓉,谭启昀,高松鹤
受保护的技术使用者:国网河南省电力公司电力科学研究院
技术研发日:
技术公布日:2024/10/14
- 还没有人留言评论。精彩留言会获得点赞!